BRENDAN COLES
New Member
- Joined
- Jun 10, 2015
- Messages
- 7 (0.00/day)
- Location
- earth
To view this case mod, go here.
































Specs:
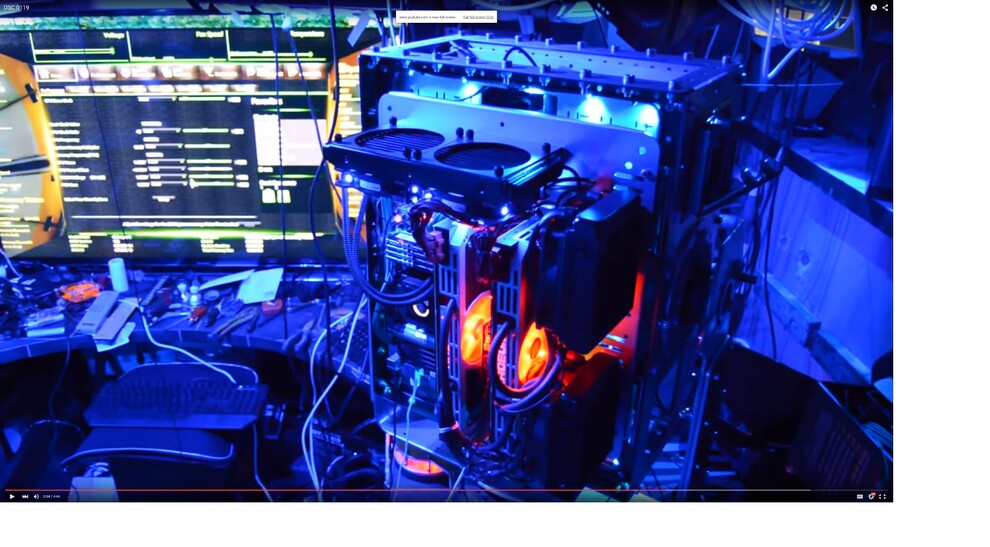
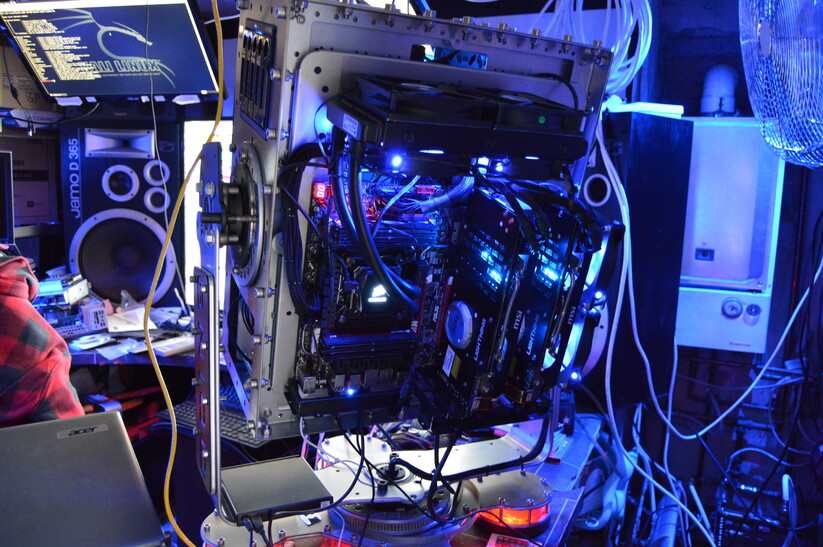
evga sr2
4 way gtx 580 hydrocoppers
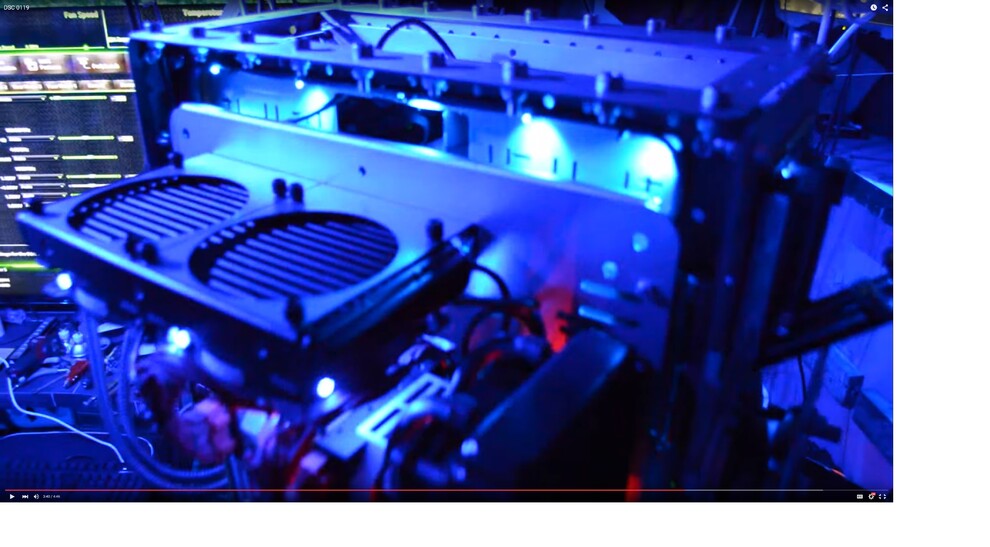
triple 480 rads
24 120mm fans
3 80mm fans
evga 1500 supernova psu
vagar 360 deg rotation pump and res
evga custom 4 way sli jumper
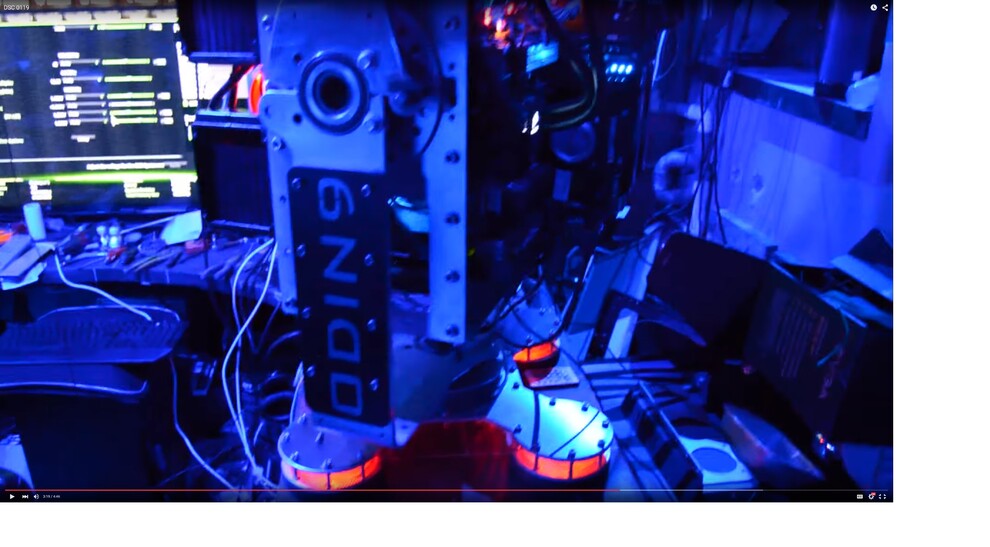
robotic chassis
360 degree chassis (low drip water block removal)
invertible dvd /2.5 inch caddy
5* 5.25 hd caddy
full load (30 amp)data/power slip rings
laser cut powder coated welsh steel chassis
mini cooper axle hubs
lift off - hinged side panels
morphable chassis
Mods:
Full laser cut welsh steel or aluminium customisable chassis
Hand built invertible reservoir (floppy tube like aeroplane fuel tank suction) loop will work in any orientation
High power water pump with suction and 24-7 use- time on potentiometer (adjust speed)
1 into 3 balanced manifold branch -radiator supply. also even branched gpu cpu chip water supply
1 cable (30amps 240v ethernet over power slip rings)robotic ability chassis drive system with pcoip module to carry ALL DATA and power enabling totally free driven live orientation powered by a remote monitor / user interface
I wanted to be able to remove the chip water blocks
(cpu's gpu's ram etc) with no drips on the board , so I designed and built a case that could be inverted ,then I realized the chassis could be driven by servos ,




























Specs:
evga sr2
4 way gtx 580 hydrocoppers
triple 480 rads
24 120mm fans
3 80mm fans
evga 1500 supernova psu
vagar 360 deg rotation pump and res
evga custom 4 way sli jumper
robotic chassis
360 degree chassis (low drip water block removal)
invertible dvd /2.5 inch caddy
5* 5.25 hd caddy
full load (30 amp)data/power slip rings
laser cut powder coated welsh steel chassis
mini cooper axle hubs
lift off - hinged side panels
morphable chassis
Mods:
Full laser cut welsh steel or aluminium customisable chassis
Hand built invertible reservoir (floppy tube like aeroplane fuel tank suction) loop will work in any orientation
High power water pump with suction and 24-7 use- time on potentiometer (adjust speed)
1 into 3 balanced manifold branch -radiator supply. also even branched gpu cpu chip water supply
1 cable (30amps 240v ethernet over power slip rings)robotic ability chassis drive system with pcoip module to carry ALL DATA and power enabling totally free driven live orientation powered by a remote monitor / user interface
I wanted to be able to remove the chip water blocks
(cpu's gpu's ram etc) with no drips on the board , so I designed and built a case that could be inverted ,then I realized the chassis could be driven by servos ,
Last edited:


