 4
4
Glorious Model O 2 Mini Wireless Review
Software, Lighting & Battery Life »Sensor and Performance
The Glorious Model O 2 Mini Wireless is equipped with the BAMF 2.0, which essentially is a PixArt PAW3395. According to specifications, the 3395 is capable of up to 26,000 CPI, as well as a maximum tracking speed of 650 IPS, which equals 16.51 m/s. Out of the box, four pre-defined CPI steps are available: 400, 800, 1600, and 3200.All testing was done on the latest firmware (2023). As such, results obtained on earlier firmware versions may differ from those presented hereafter.
CPI Accuracy

I've restricted my testing to the four most common CPI steps, which are 400, 800, 1600, and 3200. As you can see, deviation is inconsistent and moderately large, which is a below average result overall. In order to account for the measured deviation, adjusted steps of 400, 800, 1550, and 3100 CPI have been used for testing.
Motion Delay
Wired testing
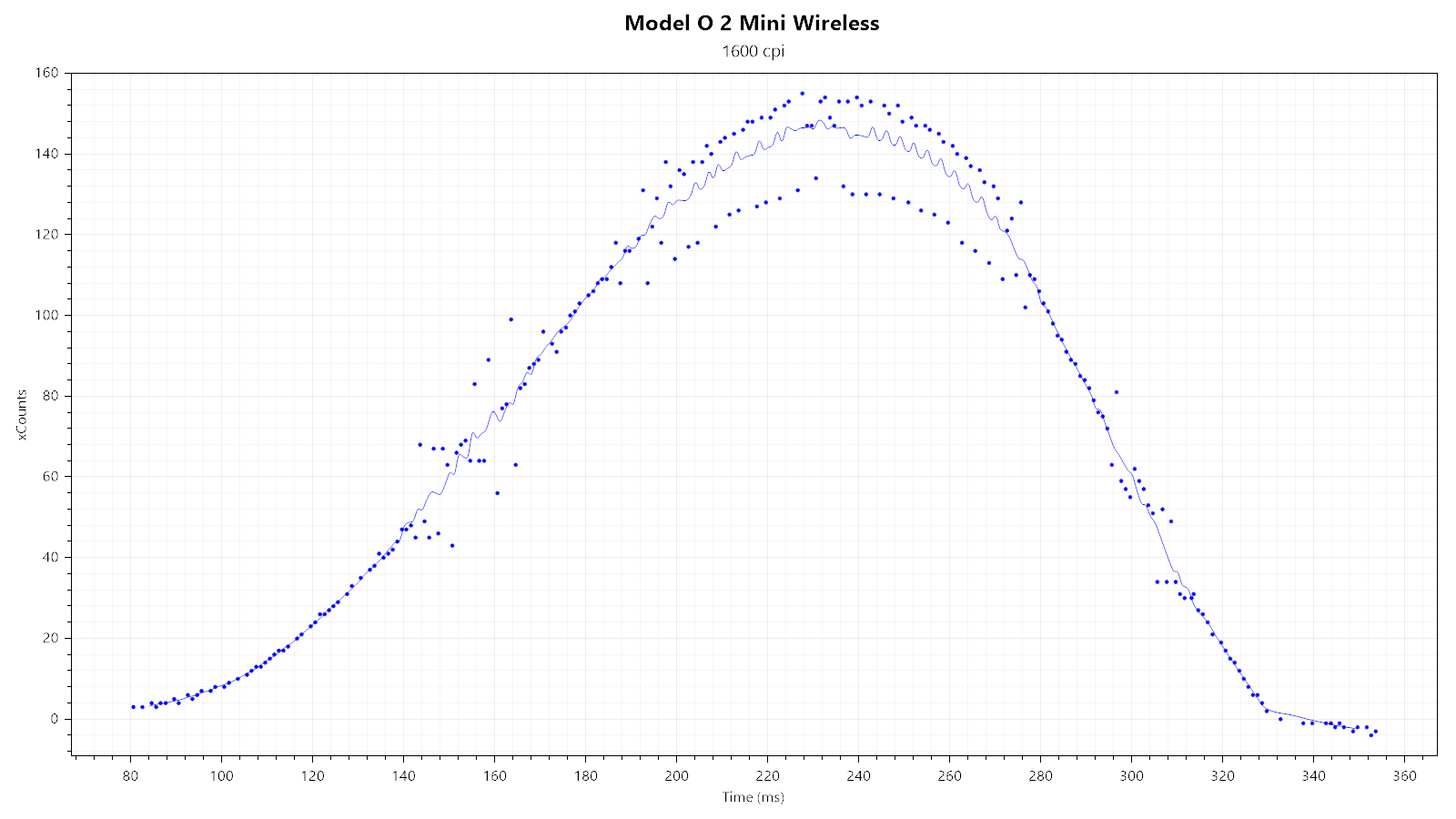
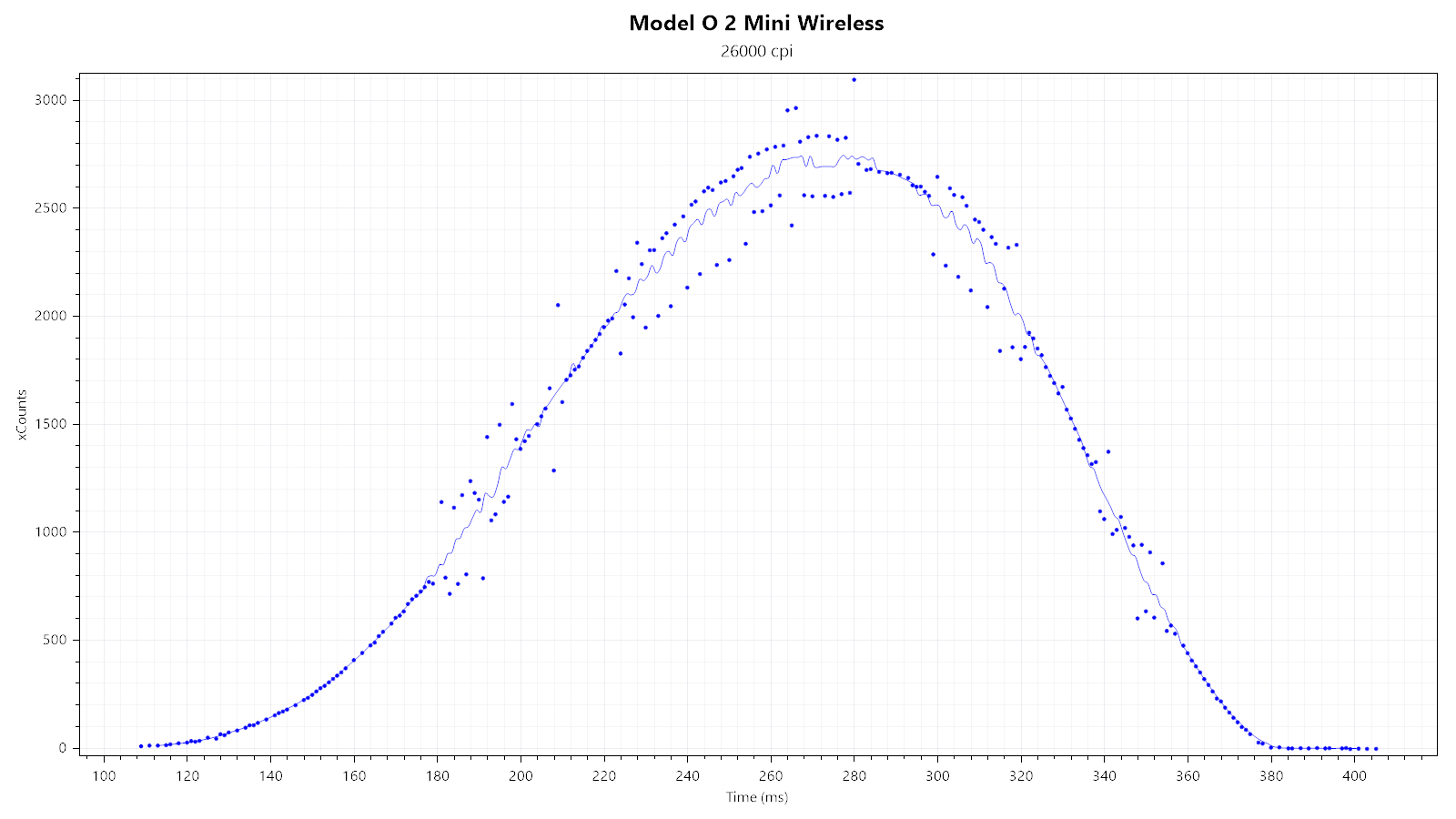
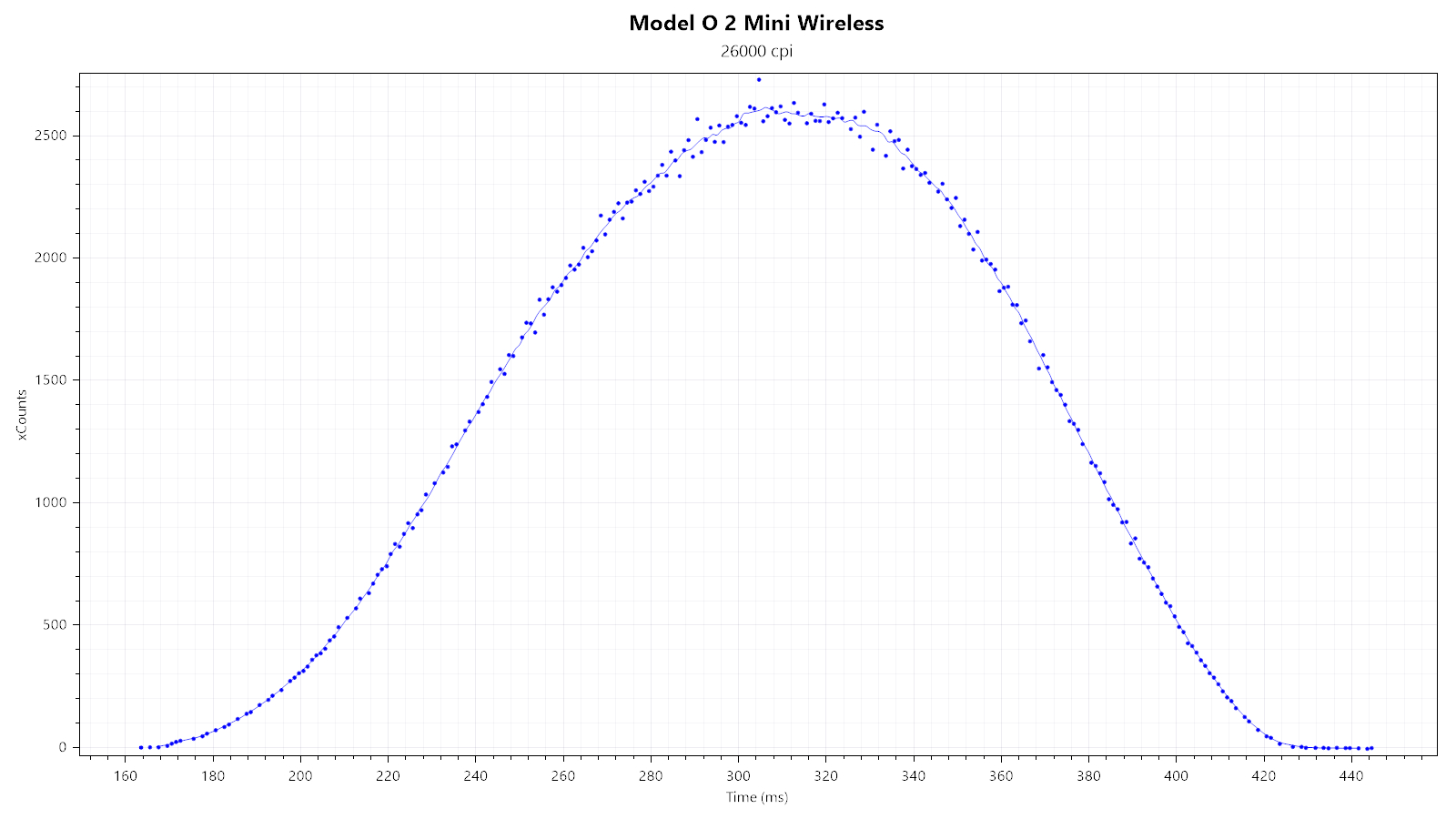
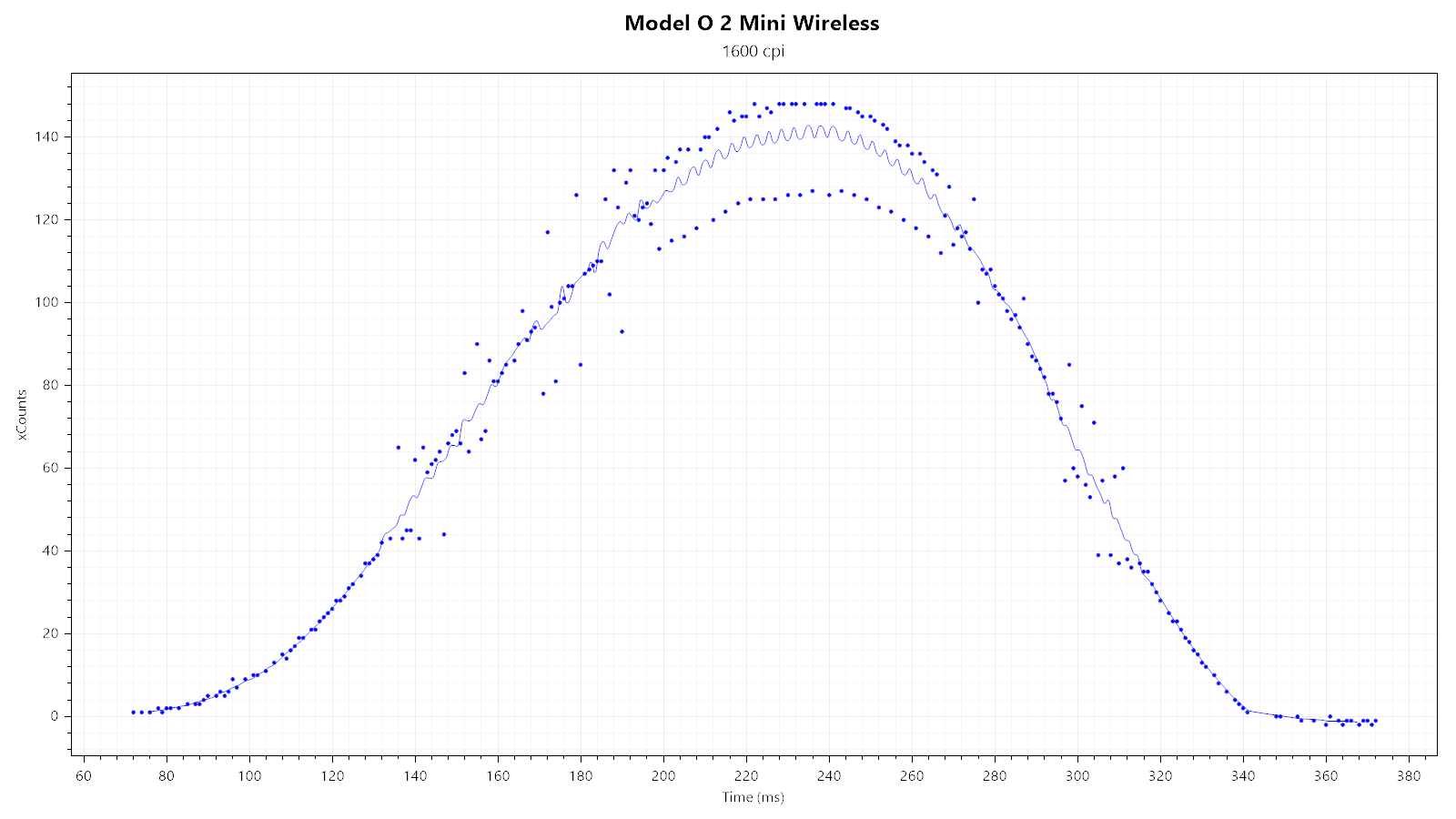
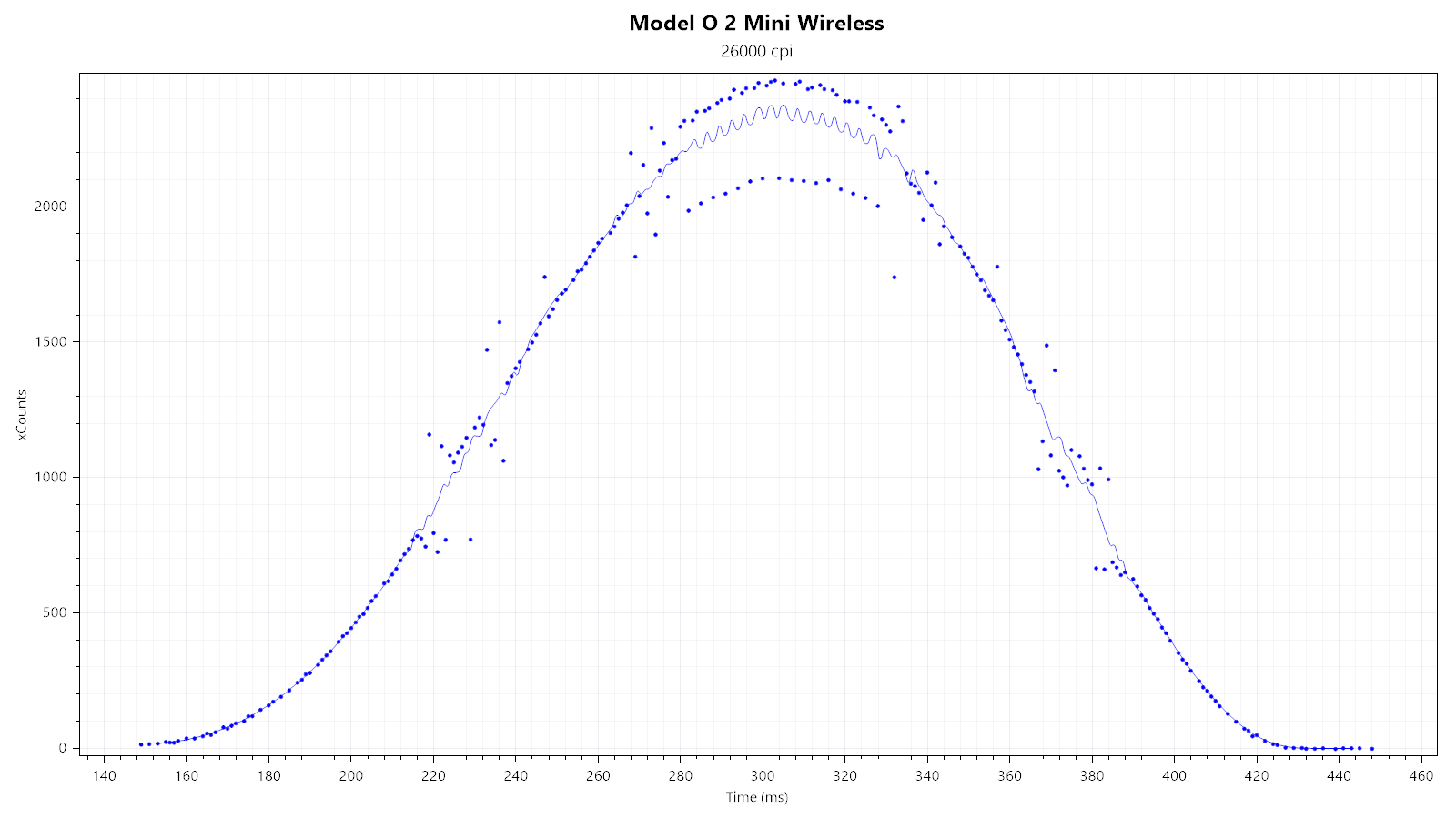
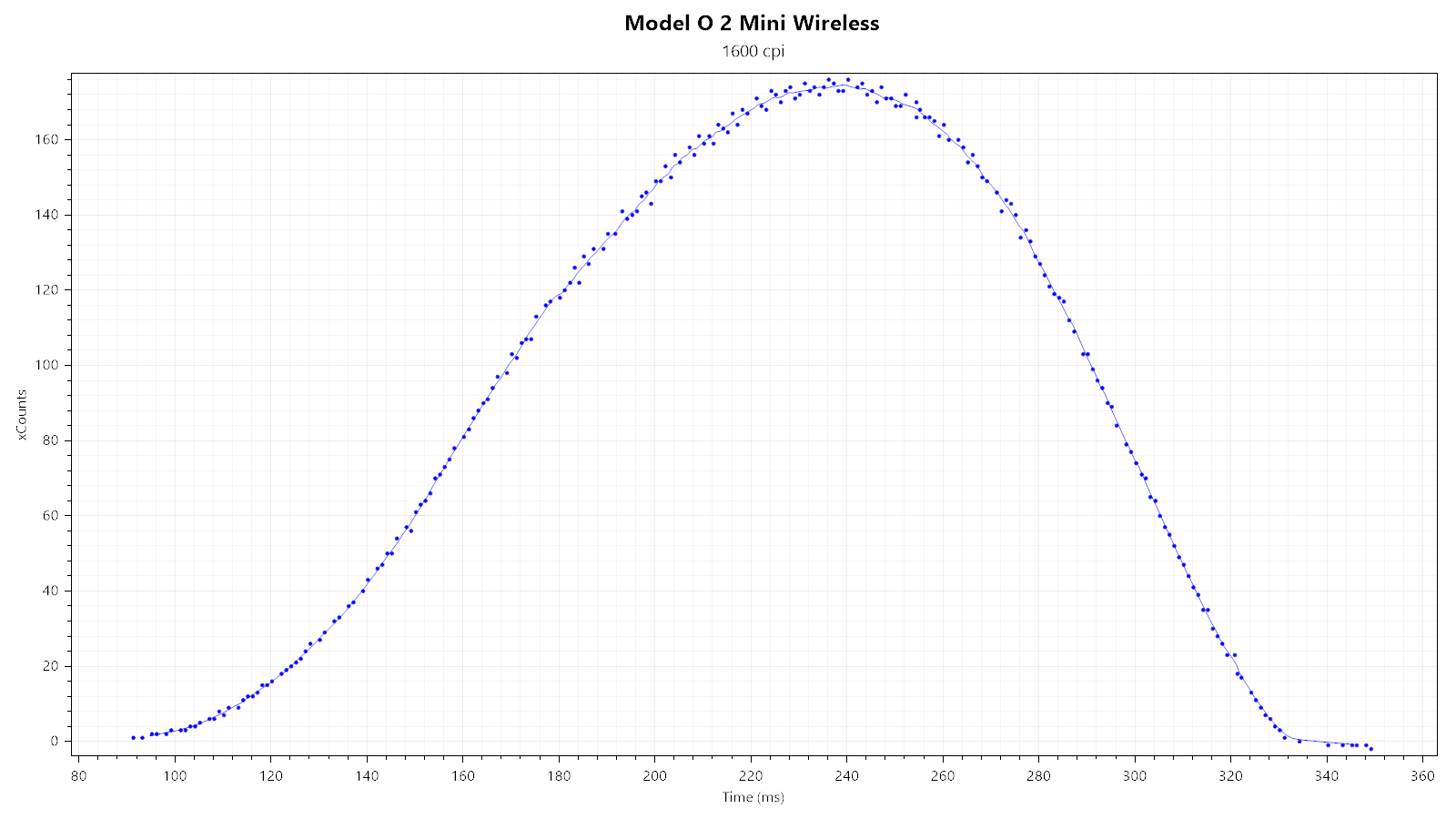
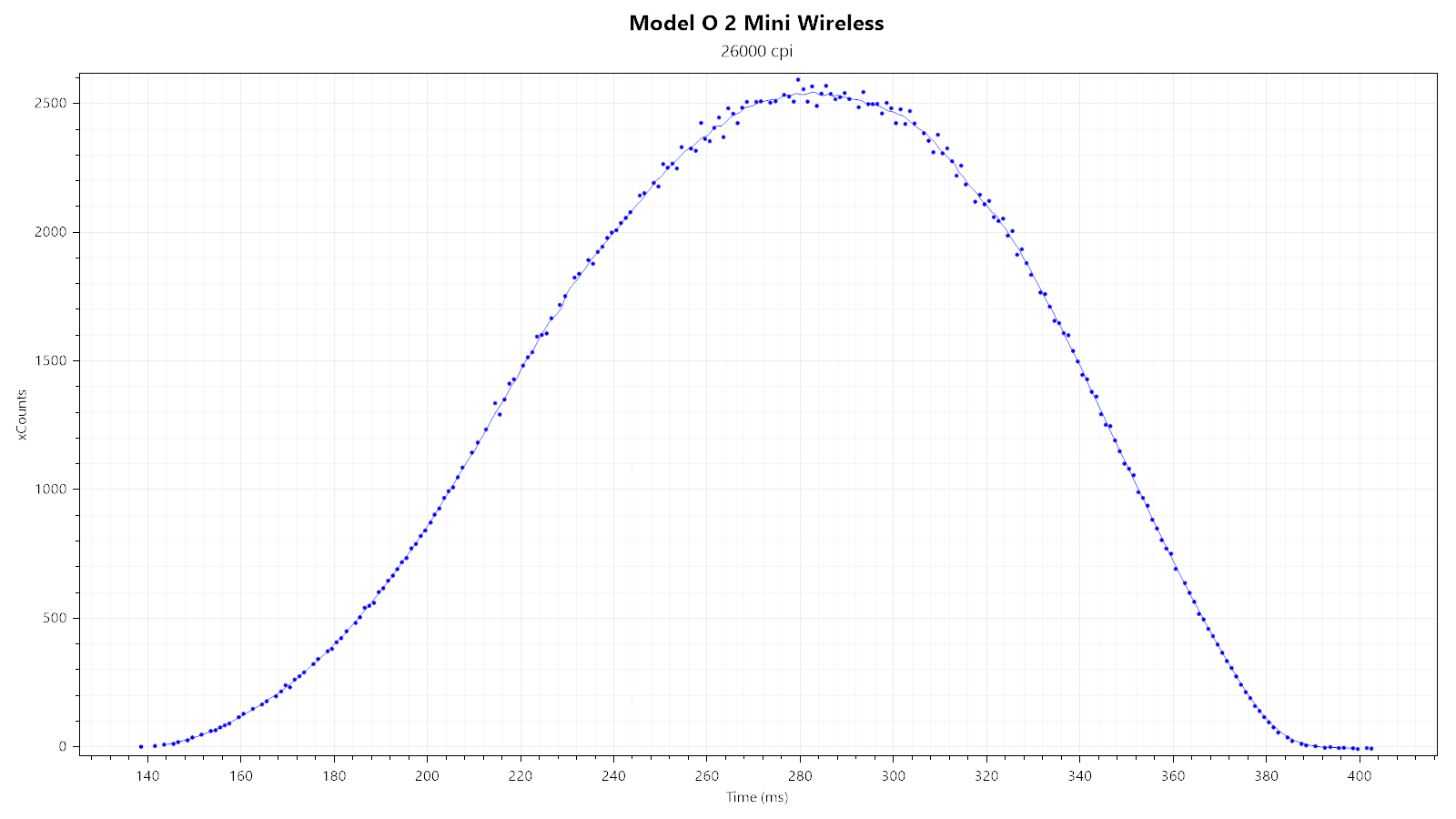
First, I'm looking at two xCounts plots—generated at 1600 and 26,000 CPI—to quickly gauge whether there is any smoothing, which would be indicated by any visible "kinks." Neither plot shows any kinks, strongly suggesting there not being any smoothing across the entire CPI range.
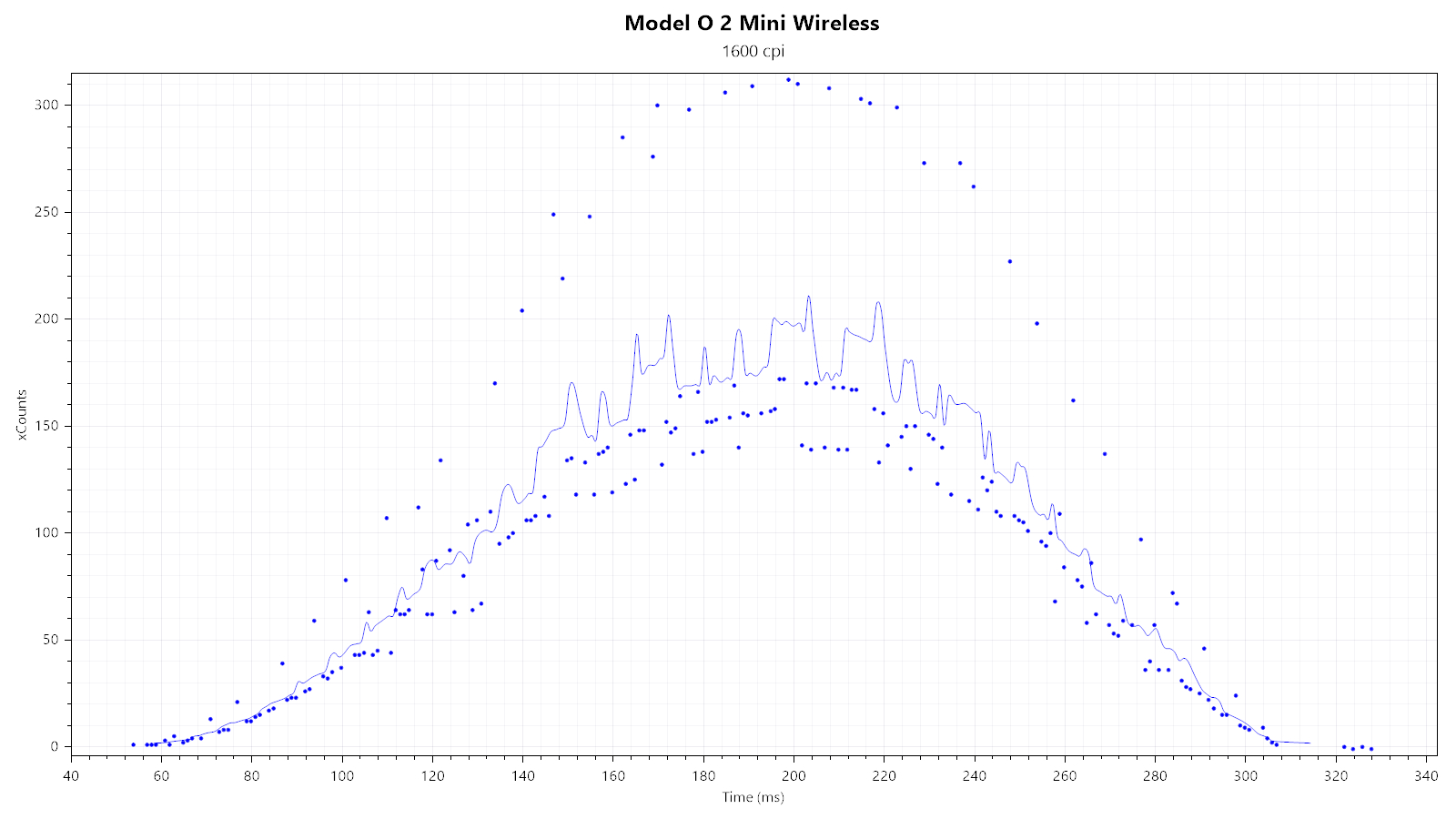
Somewhat curiously, tracking changes dramatically upon disabling RGB lighting, and to the worse.
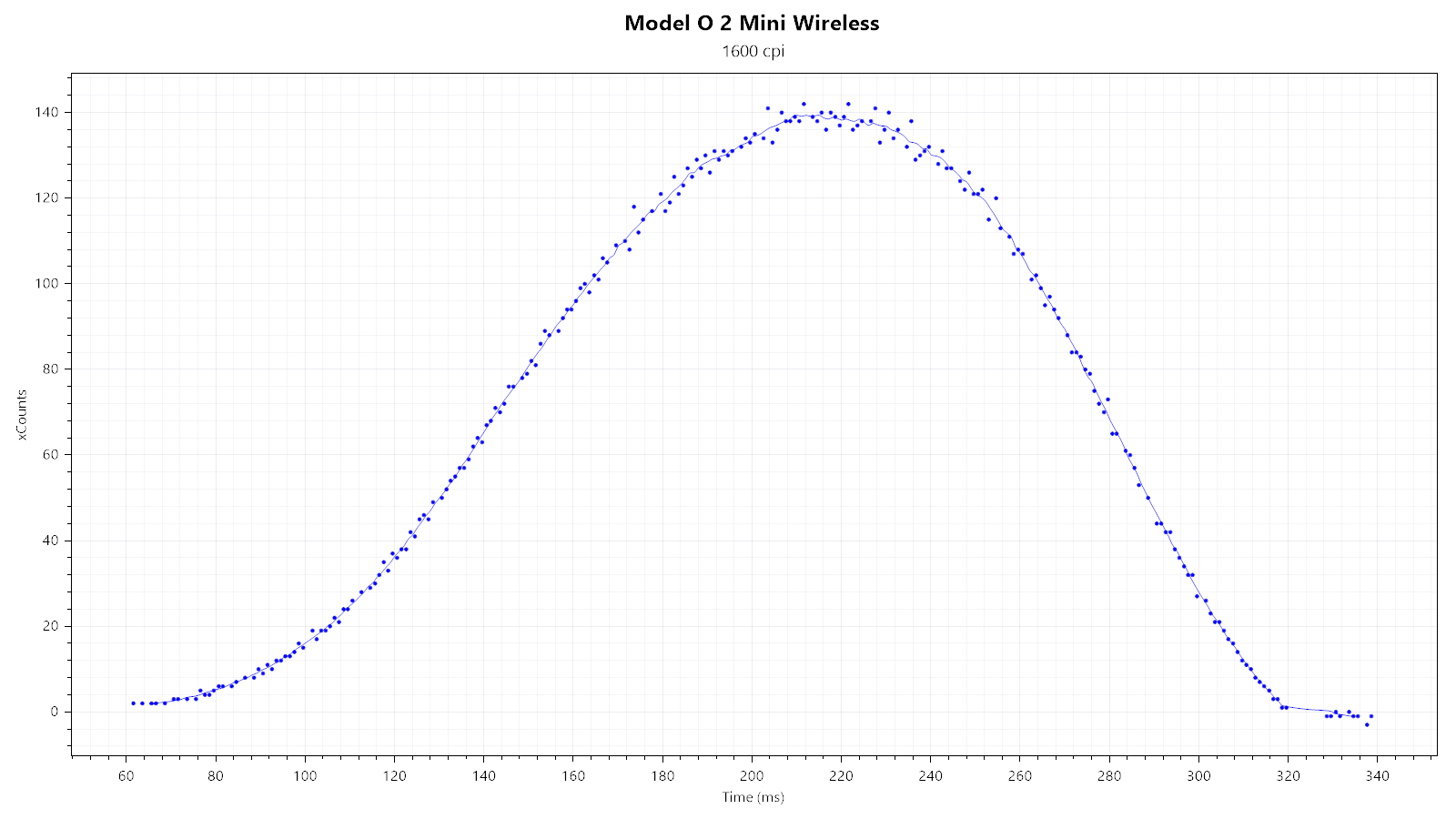
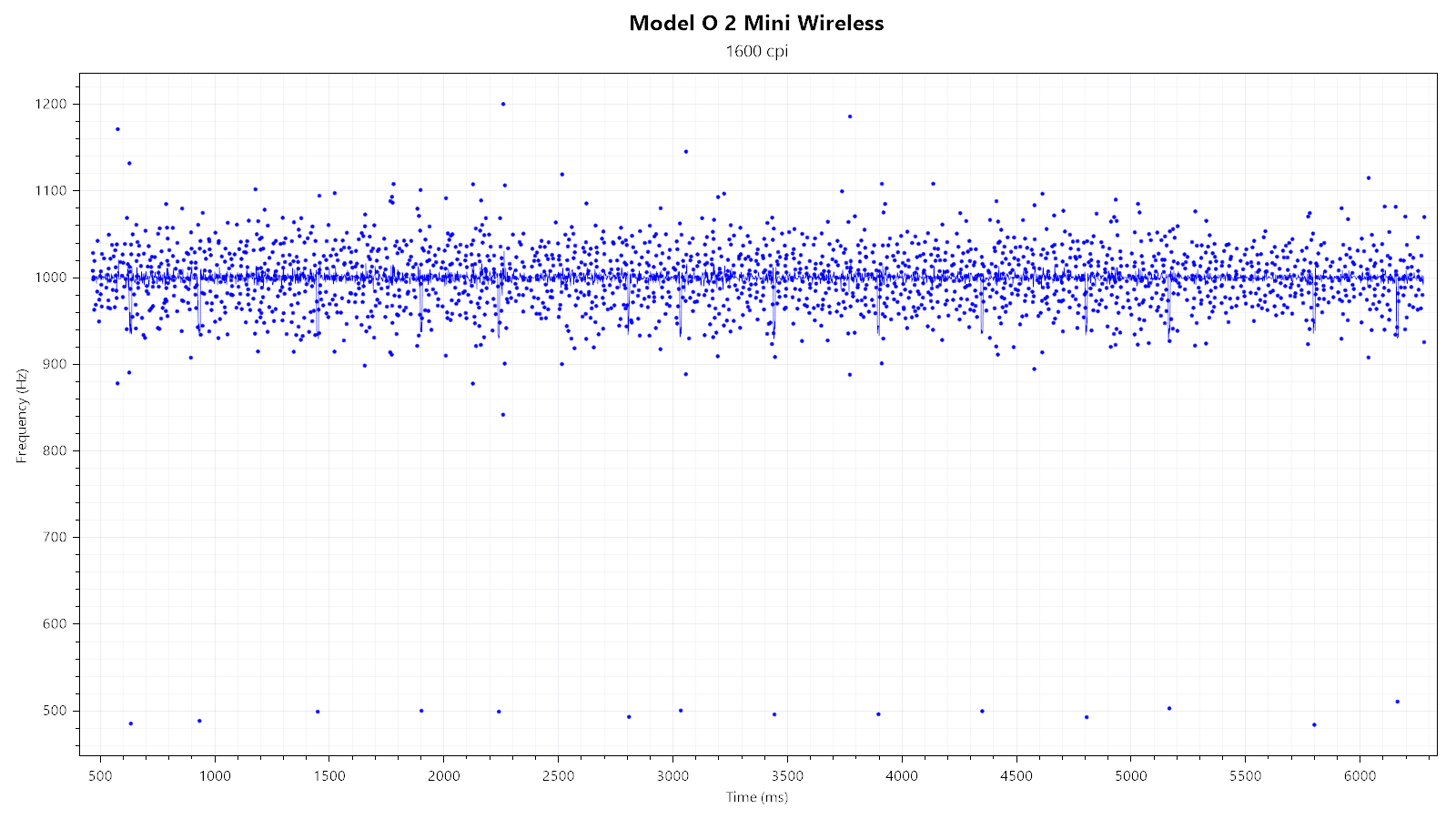
The Model O 2 Mini Wireless also allows enabling MotionSync, which effectively synchronizes SPI reads with USB polls, resulting in very low SPI timing jitter as seen above.
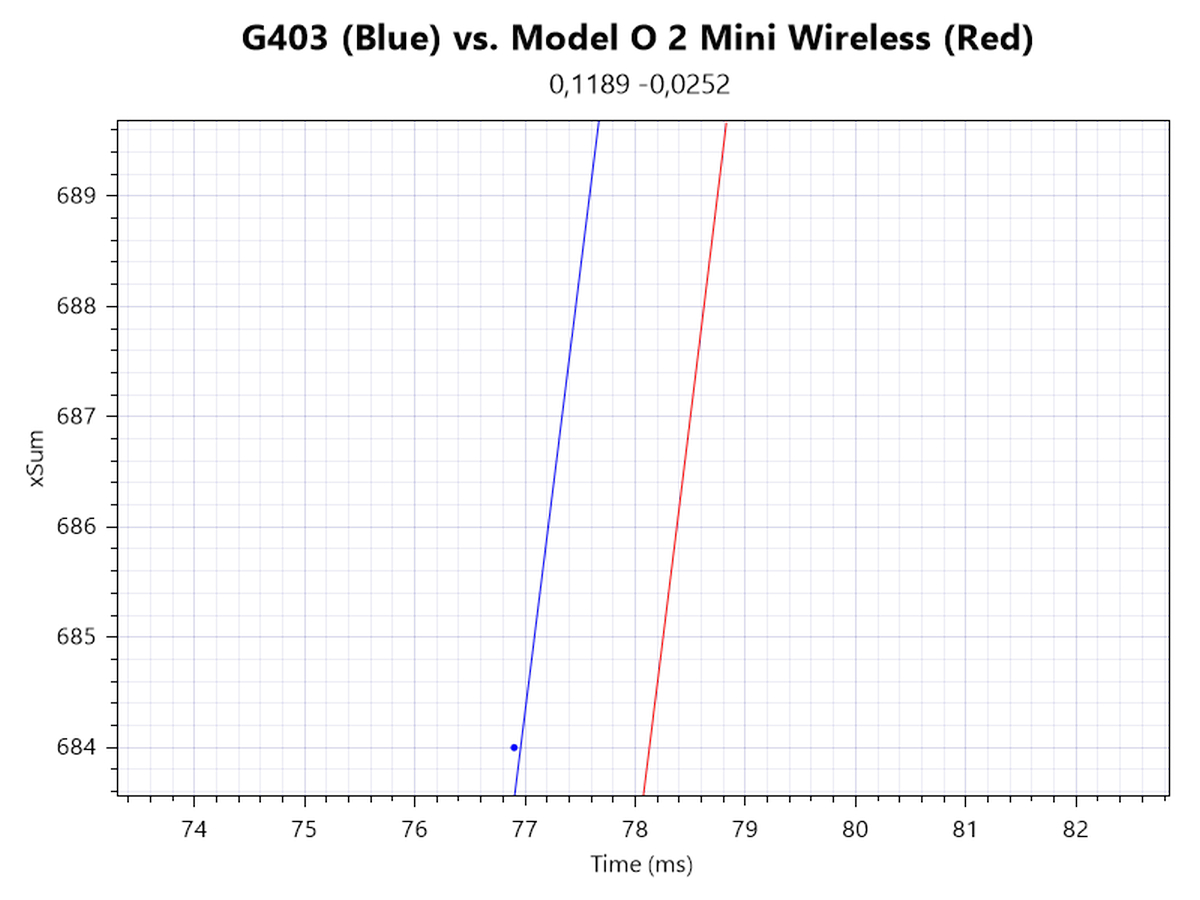
Determining motion delay is complicated by the fact that at any point during the motion, motion delay may be increased by at least a single interval.
As can be seen above, any of these shifts are correlated with an off-period poll. While I'm unable to reproduce this behavior consistently, it happens often enough to where determining motion delay reliably is not possible.
Wireless testing
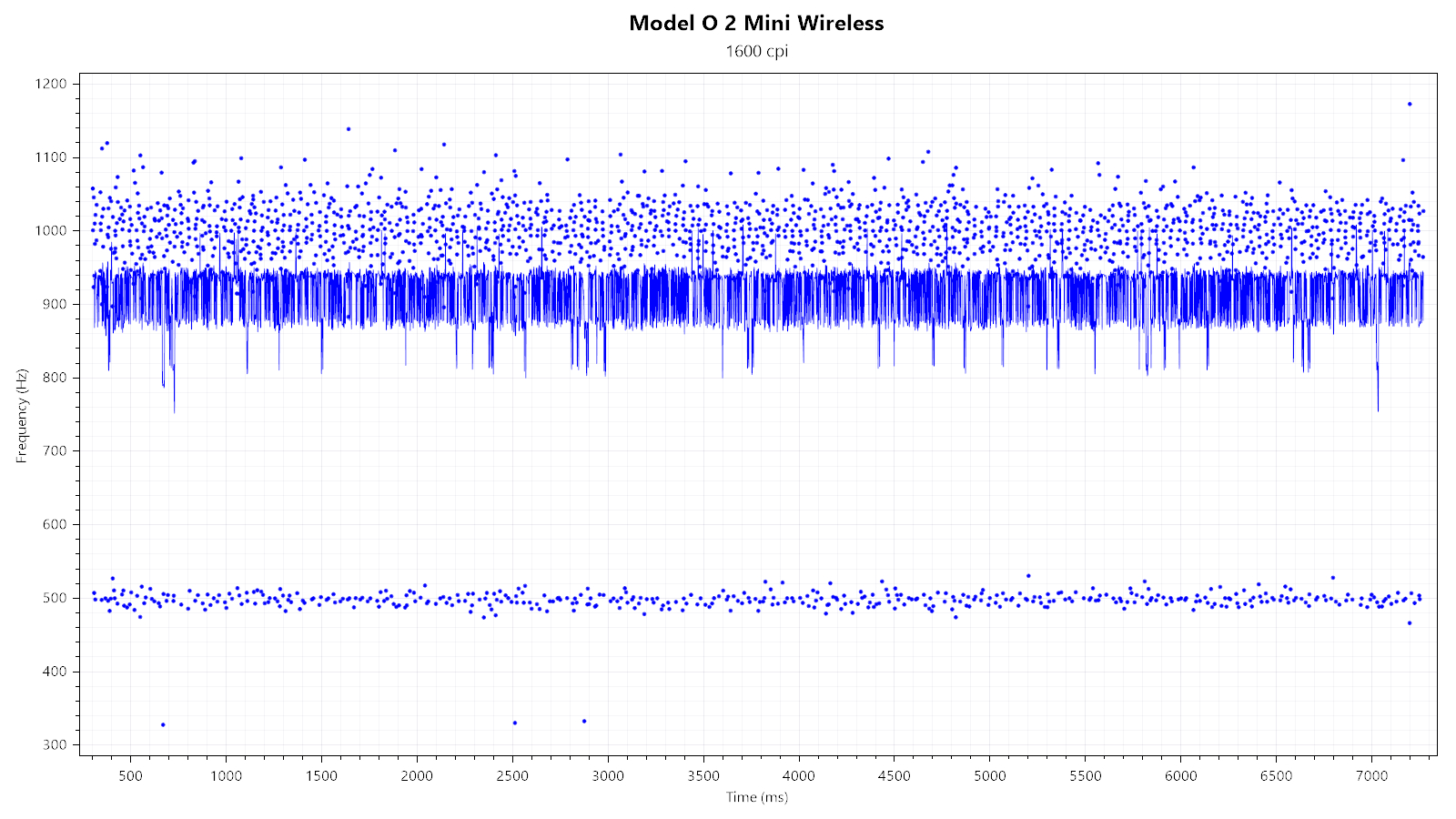
Not much changes when running the Model O 2 Mini Wireless in wireless mode as SPI timing jitter and general tracking are virtually on the same level as when wired, both without (first row) and with (second row) MotionSync.
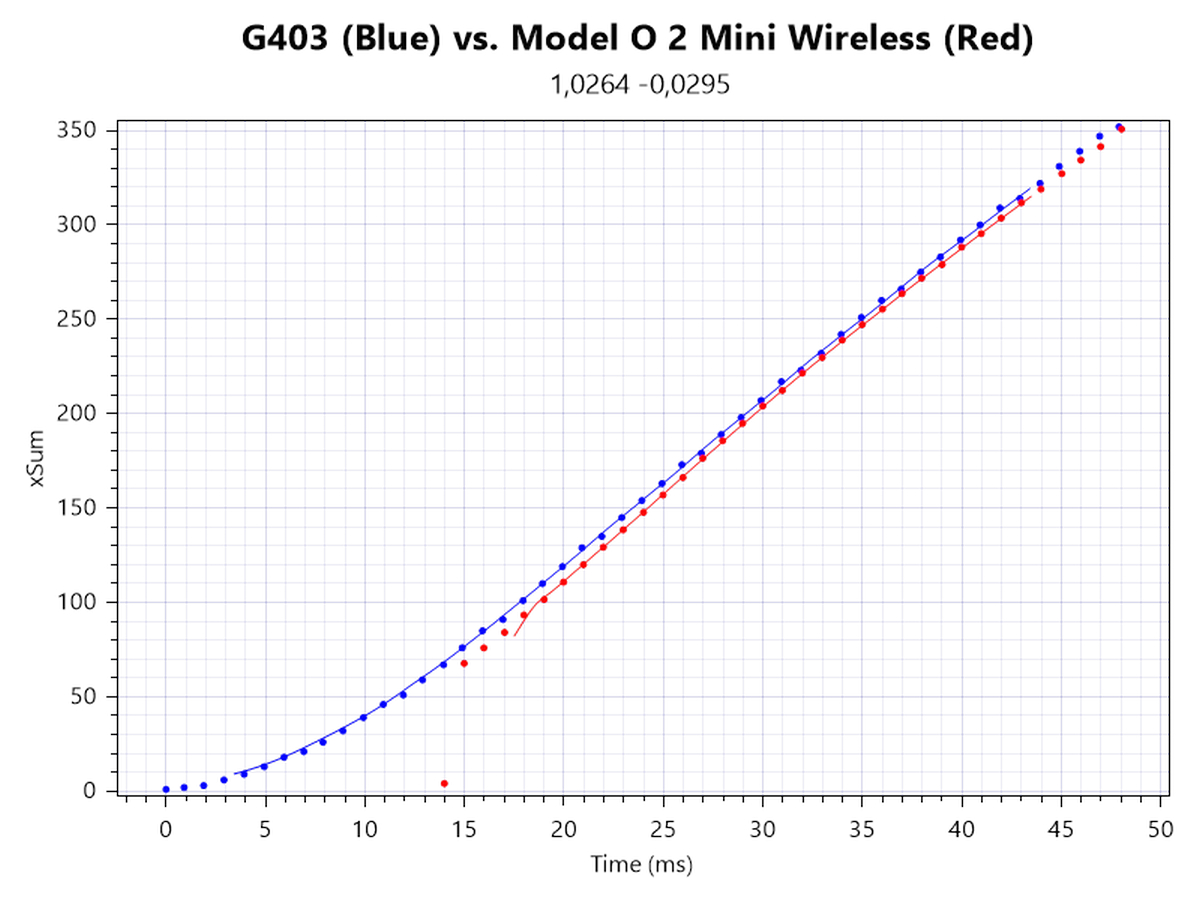
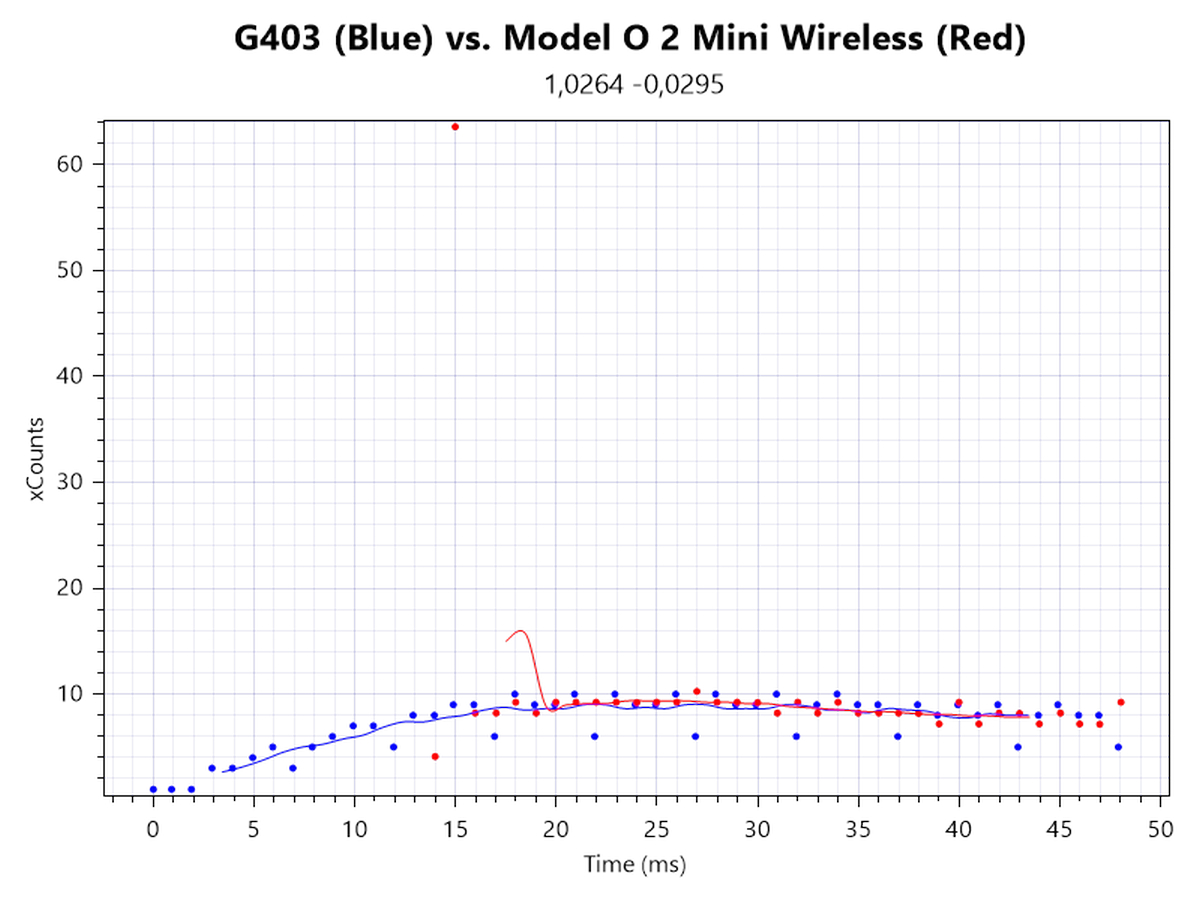
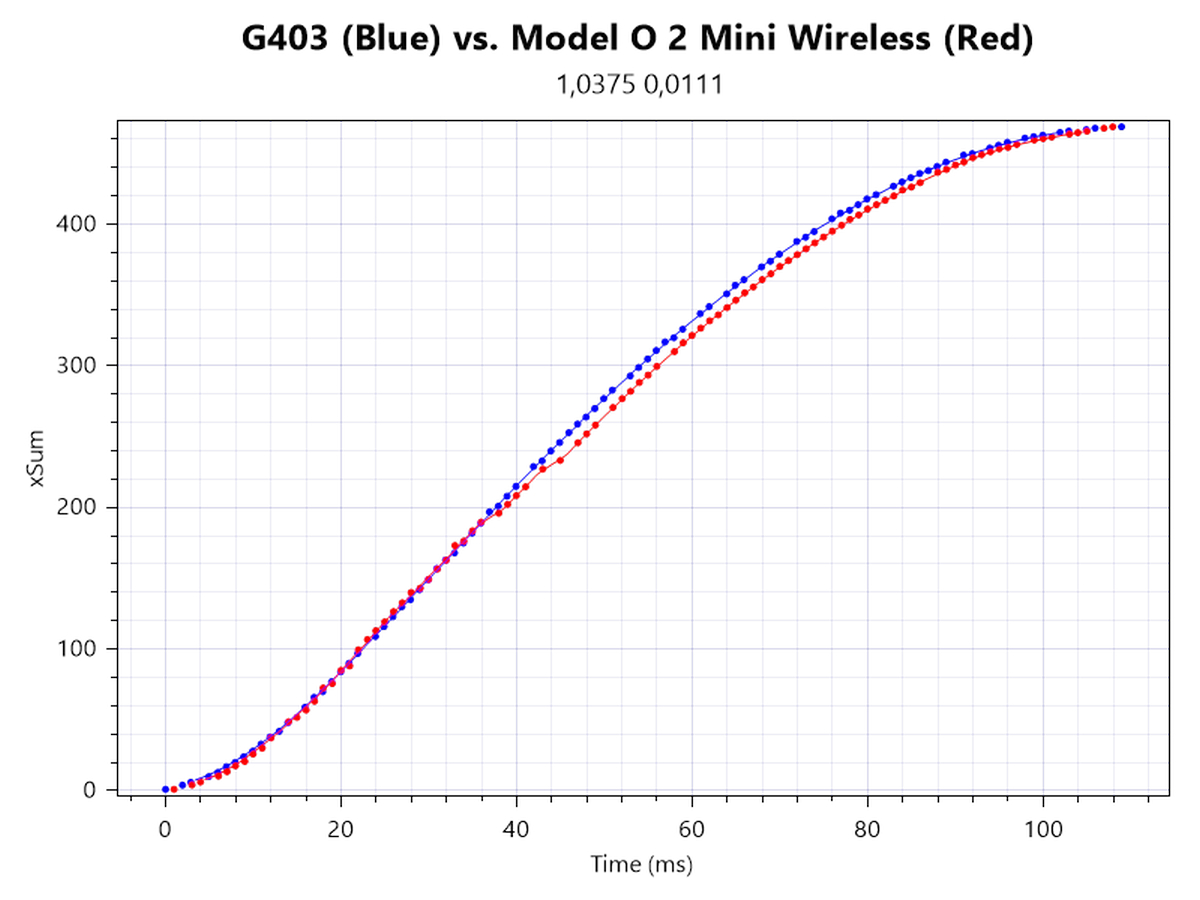
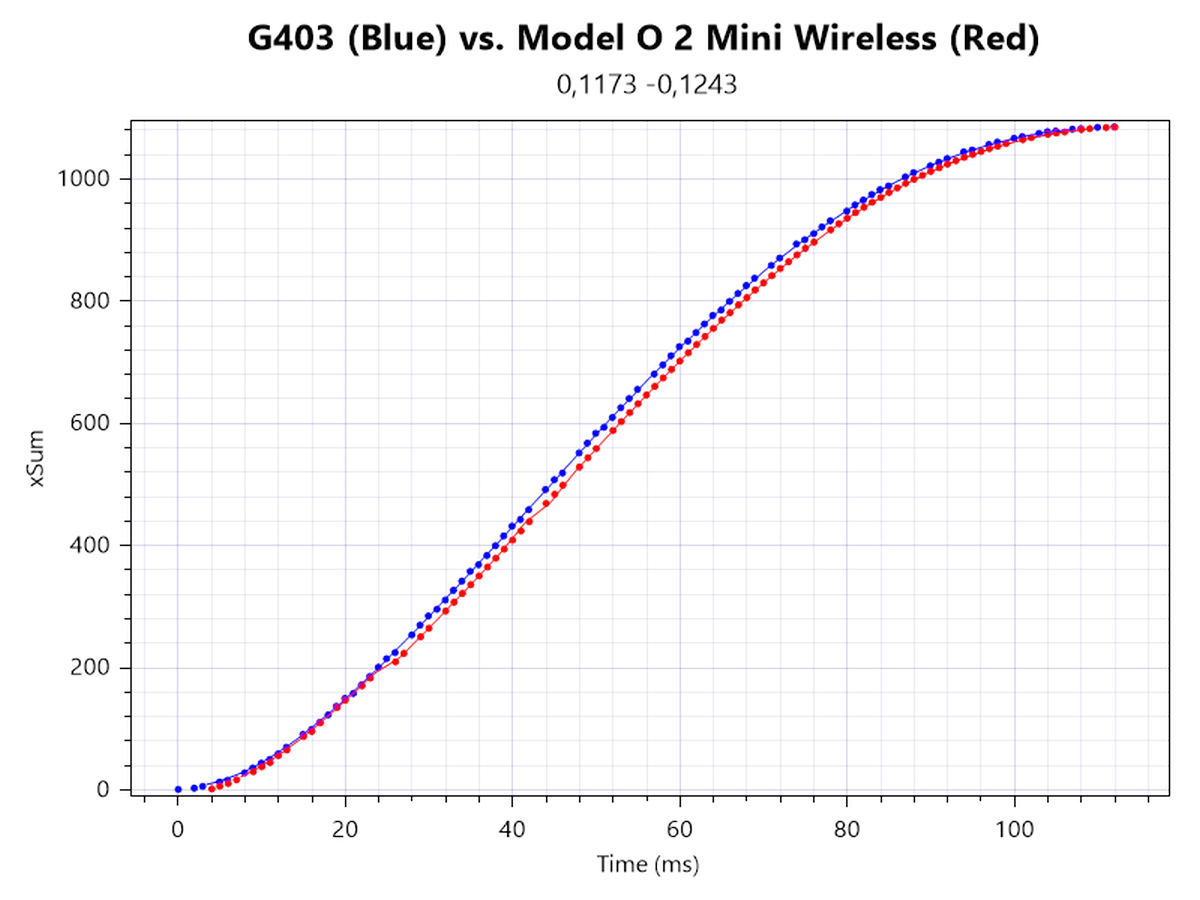
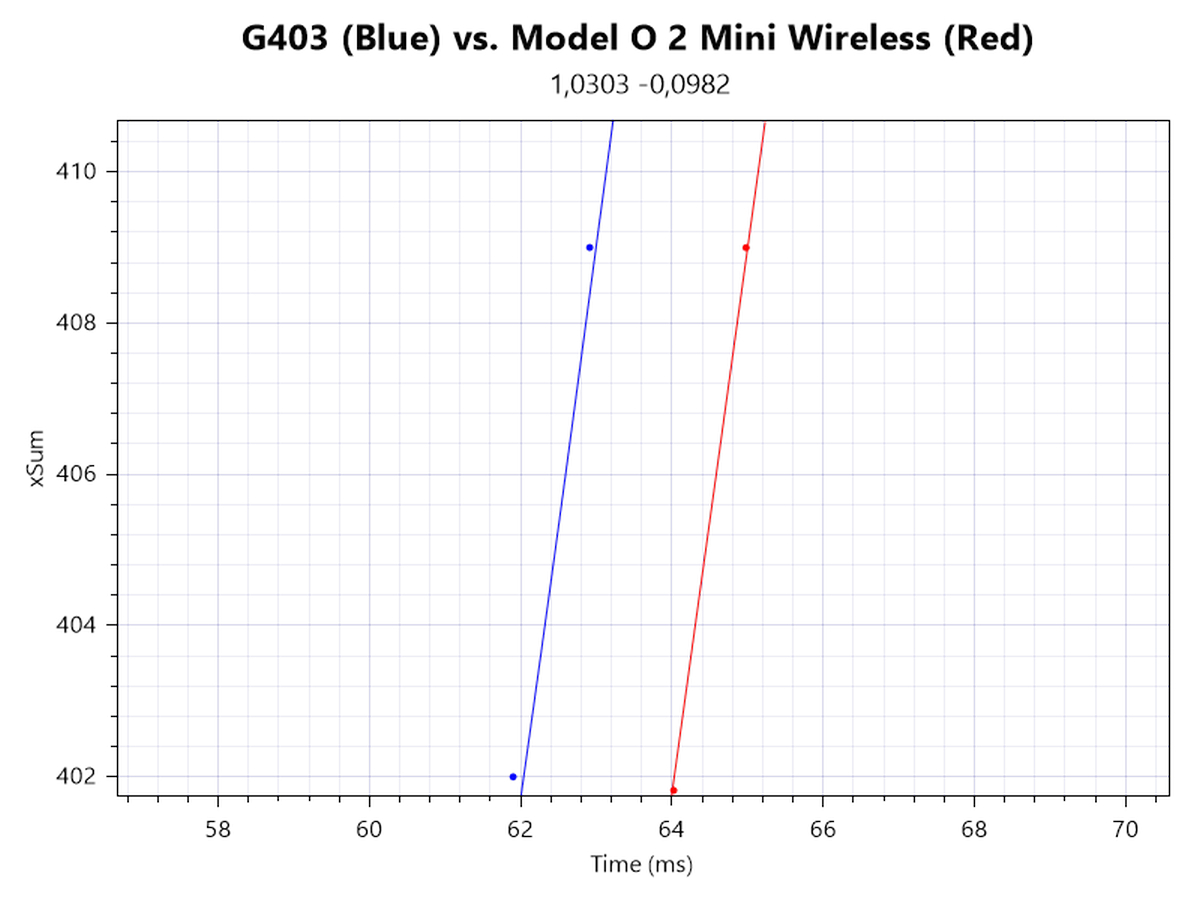
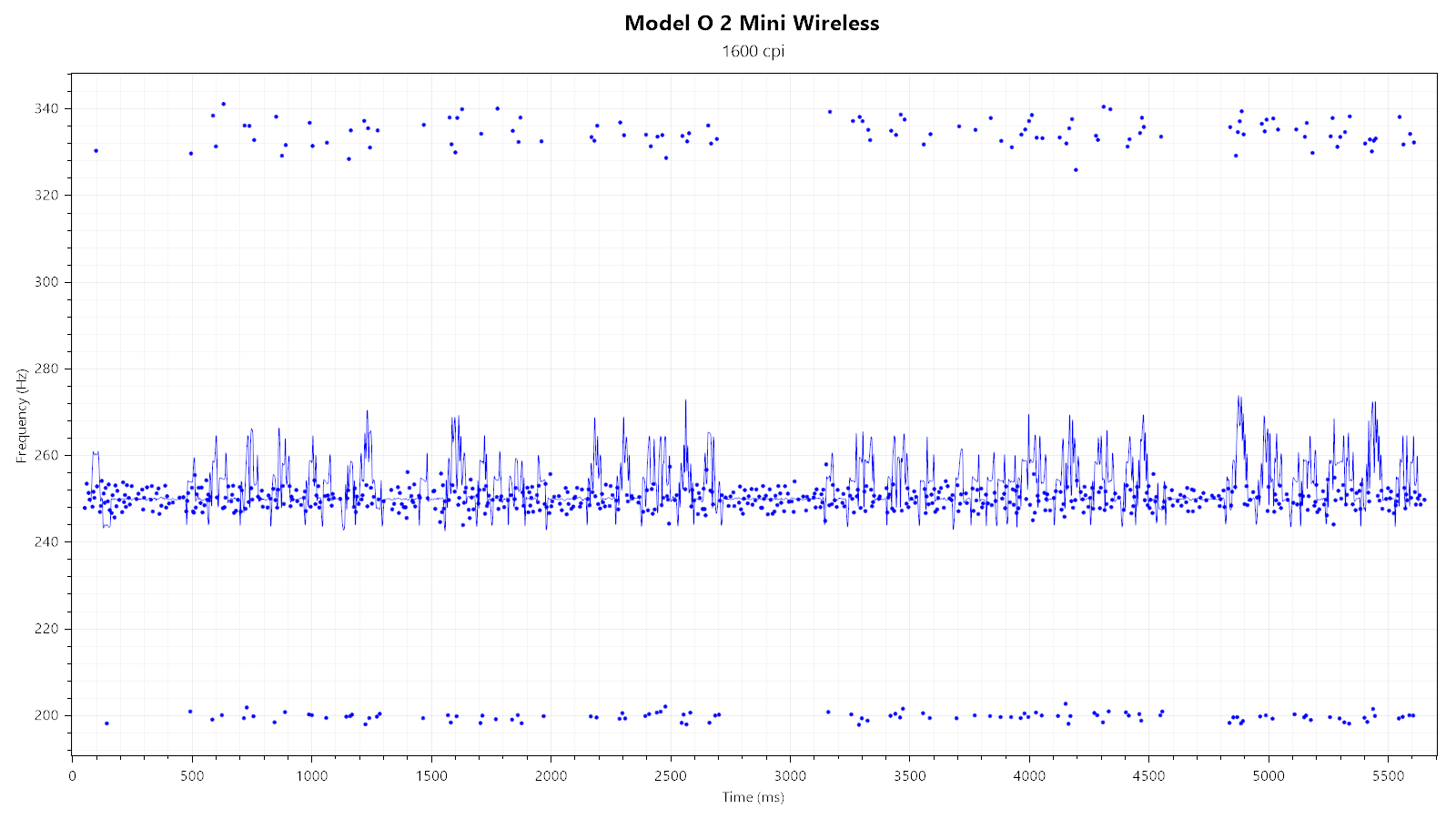
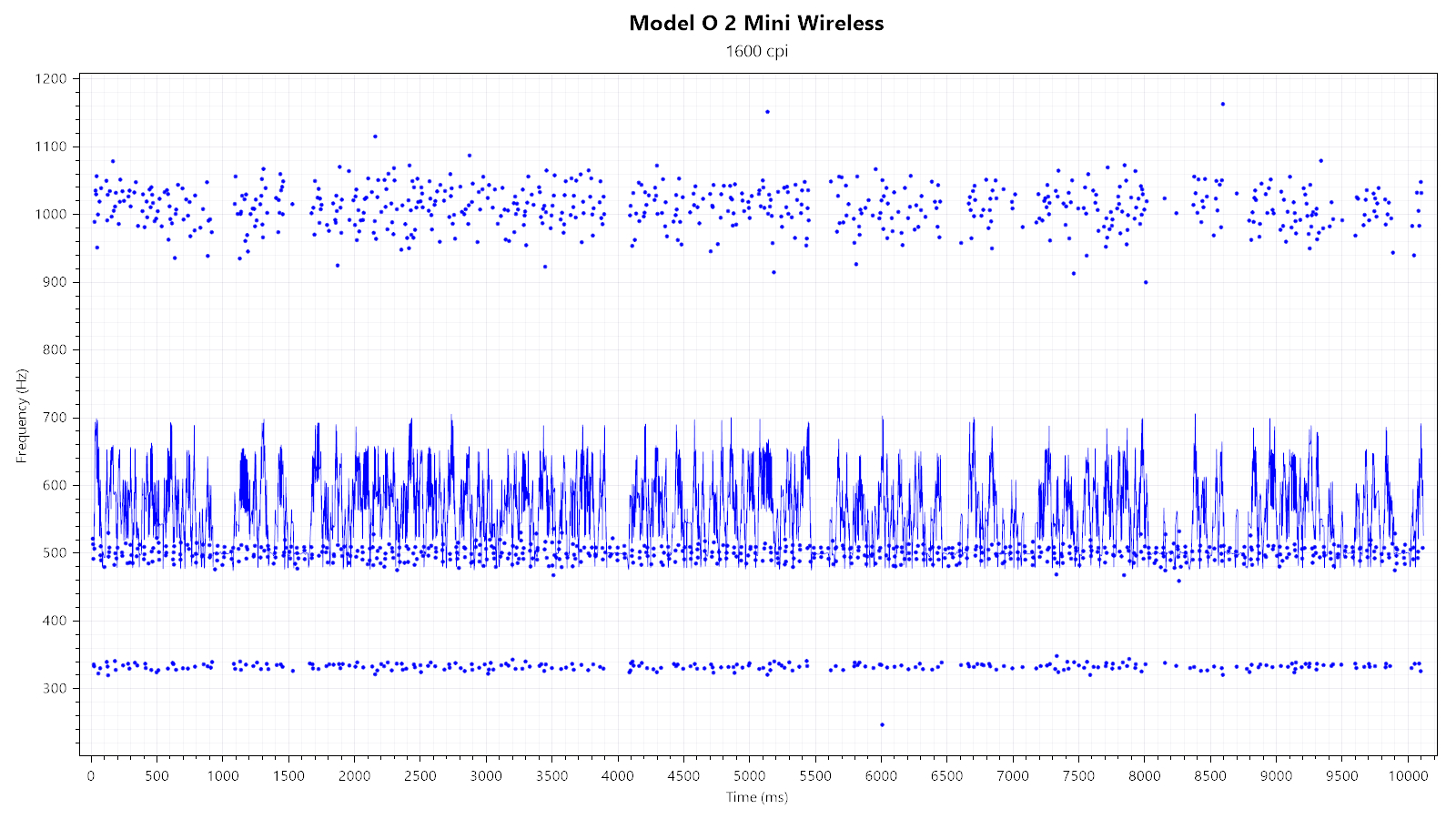
Much like the Model O 2 Wireless and Model I 2 Wireless, the Model O 2 Mini Wireless suffers from an issue whereby the first few counts are registered very late when moving from a standstill, such that new counts are suspended for a short time, only to resume by being reported in a single update. While this leaves the average position unaffected, responsiveness suffers. This only happens in wireless (2.4 GHz) operation, and about half the time.
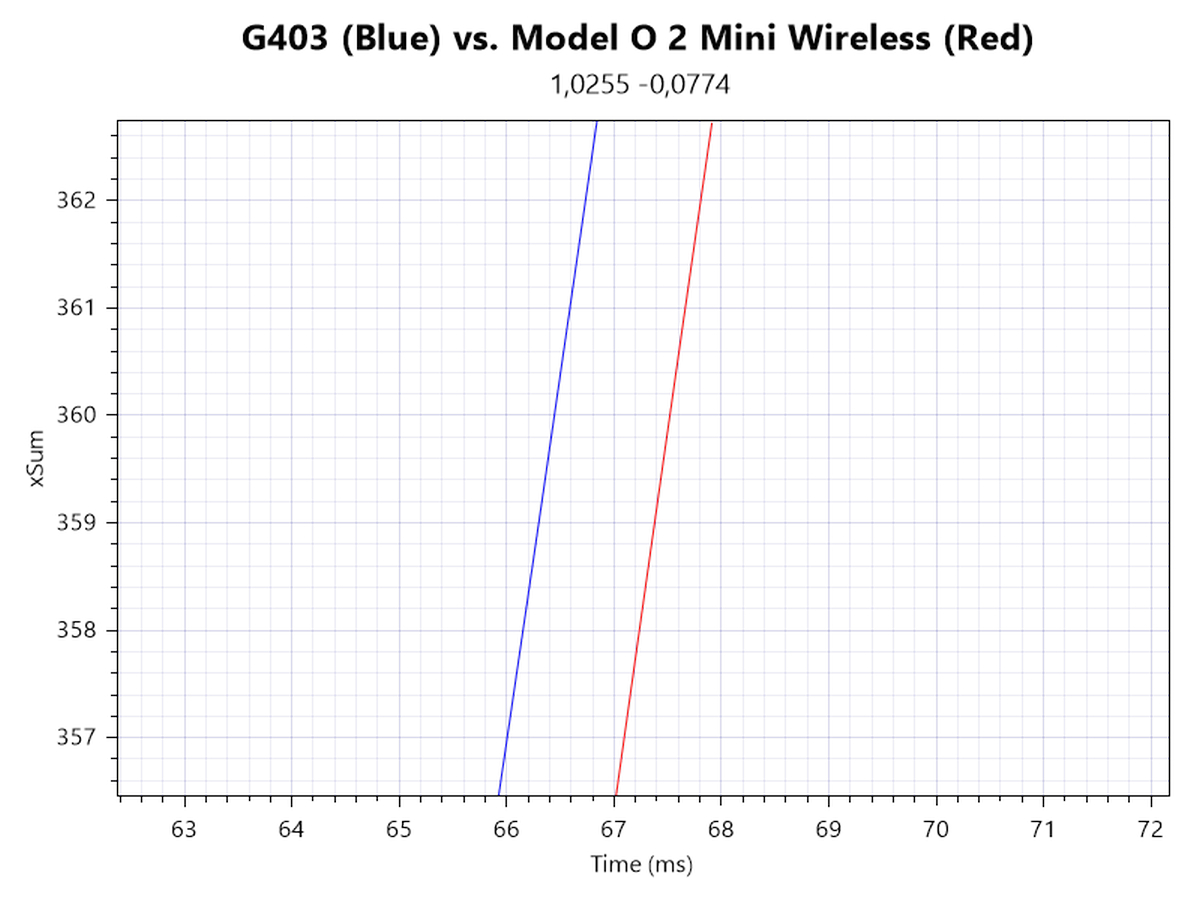
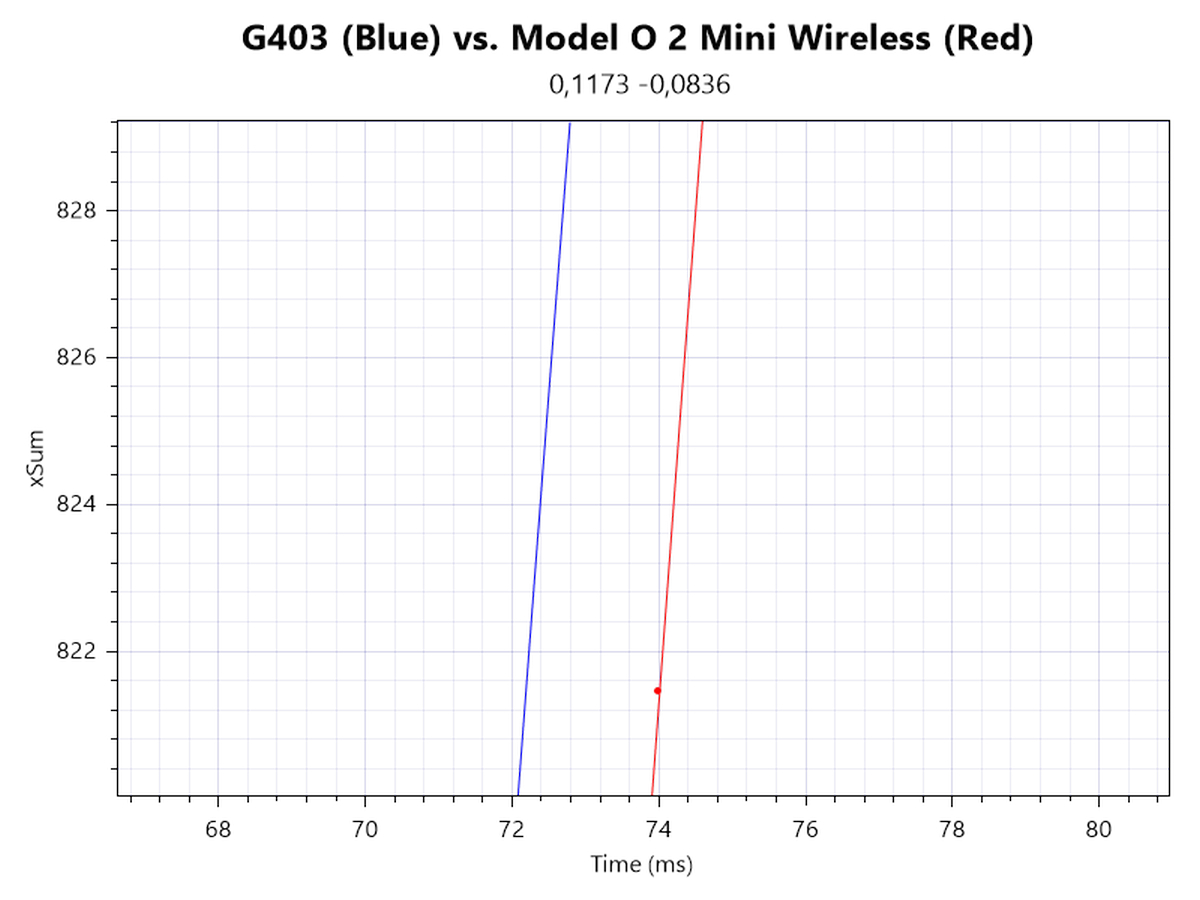
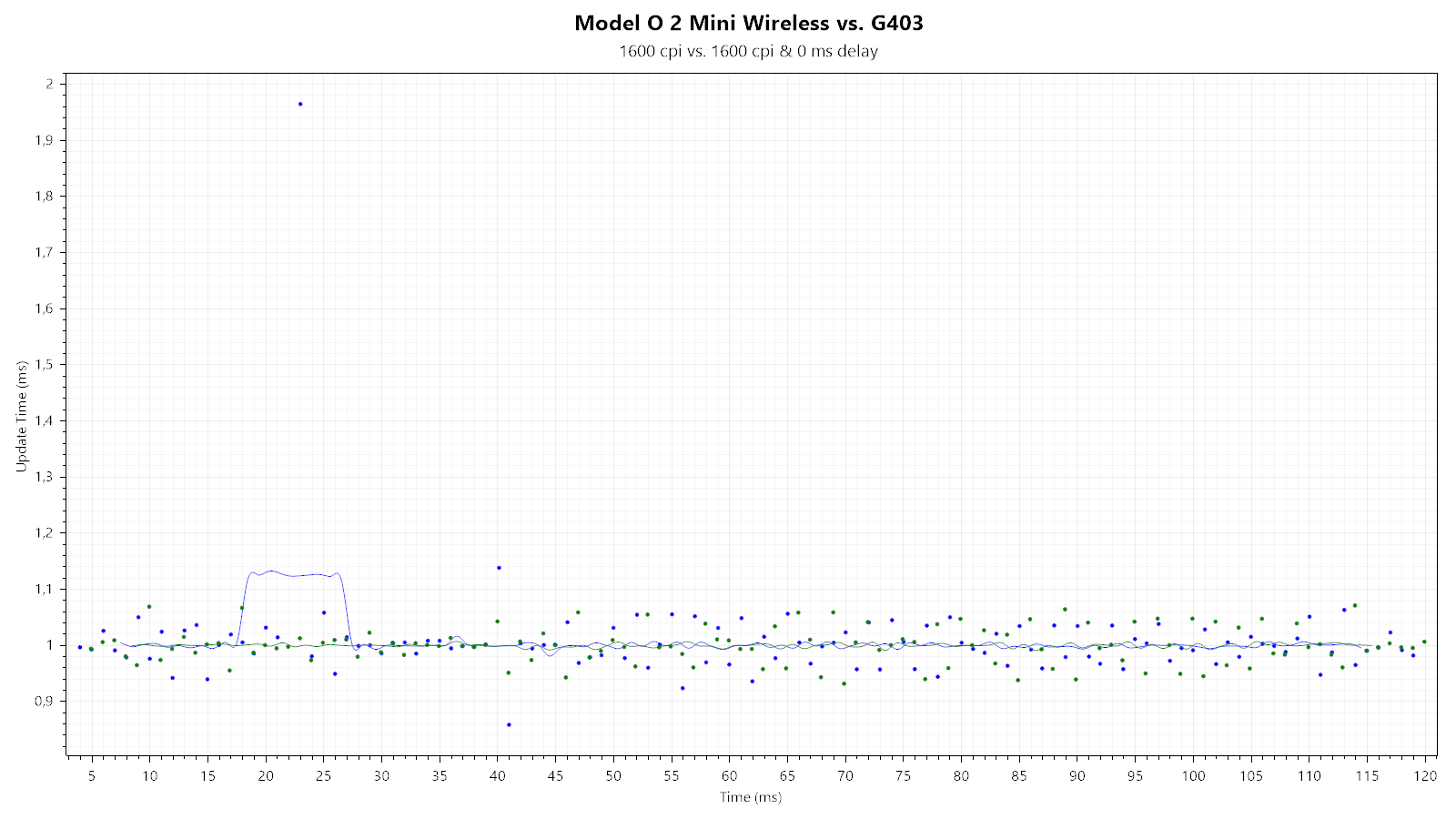
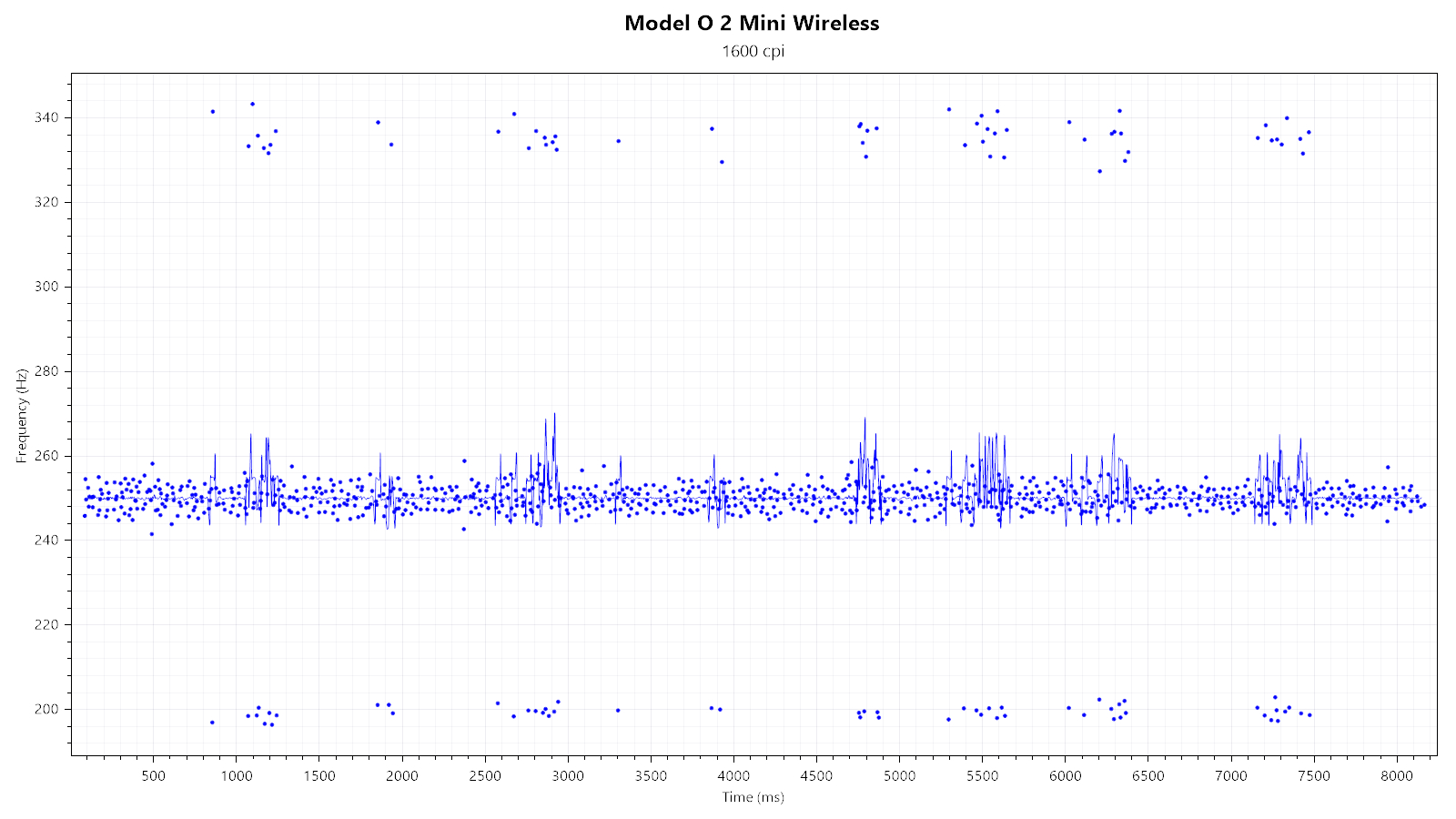
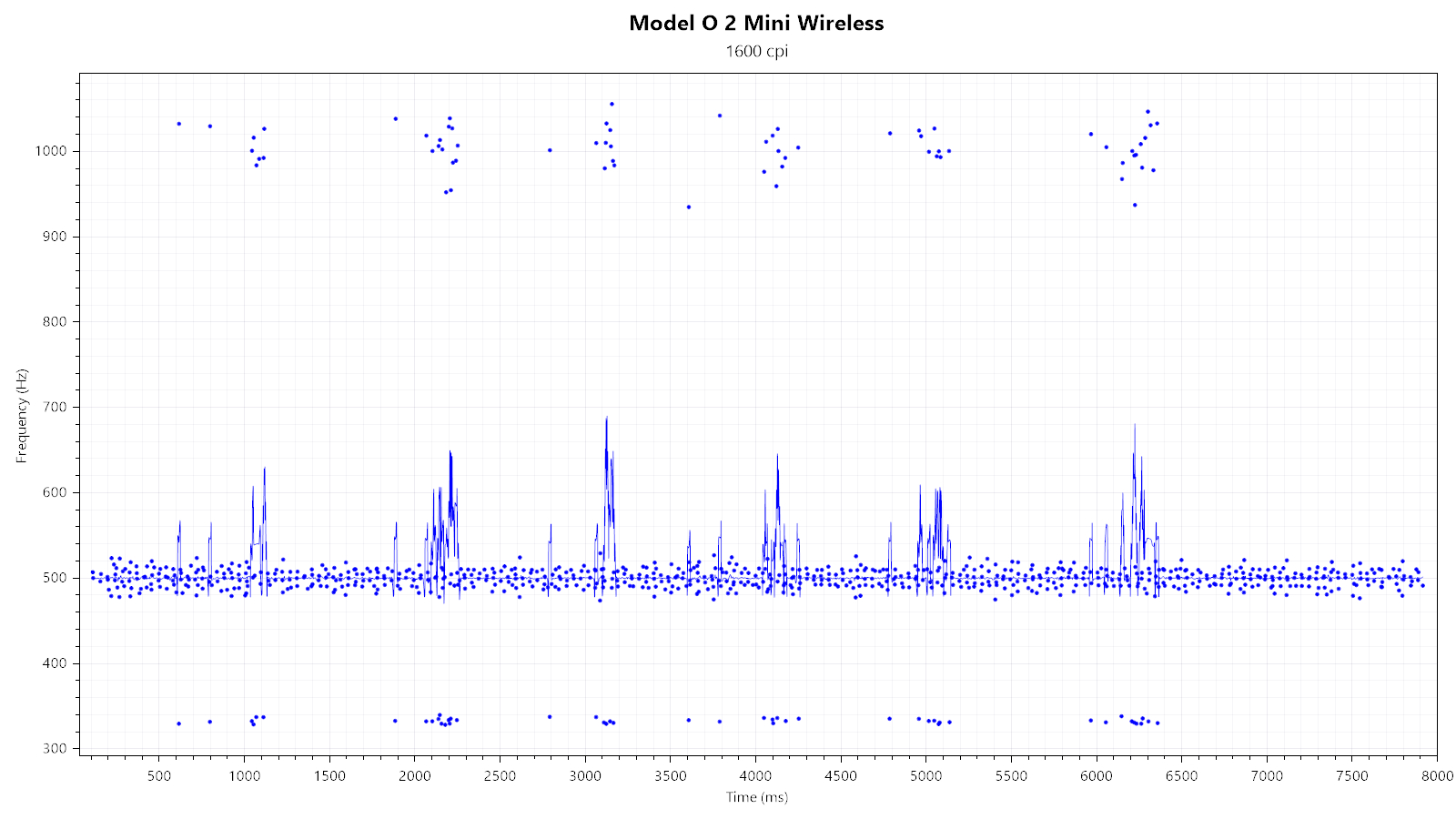
When neither the shift issue discussed above nor the suspension issue show up, determining motion delay becomes possible. 1600 and 26,000 CPI are tested, both without (first row) and with (second row) MotionSync. Without MotionSync, a motion delay differential of roughly 1 ms can be measured at 1600 and 26,000 CPI. With MotionSync, a motion delay differential of roughly 1 ms is added, totaling 2 ms.
Speed-related Accuracy Variance (SRAV)
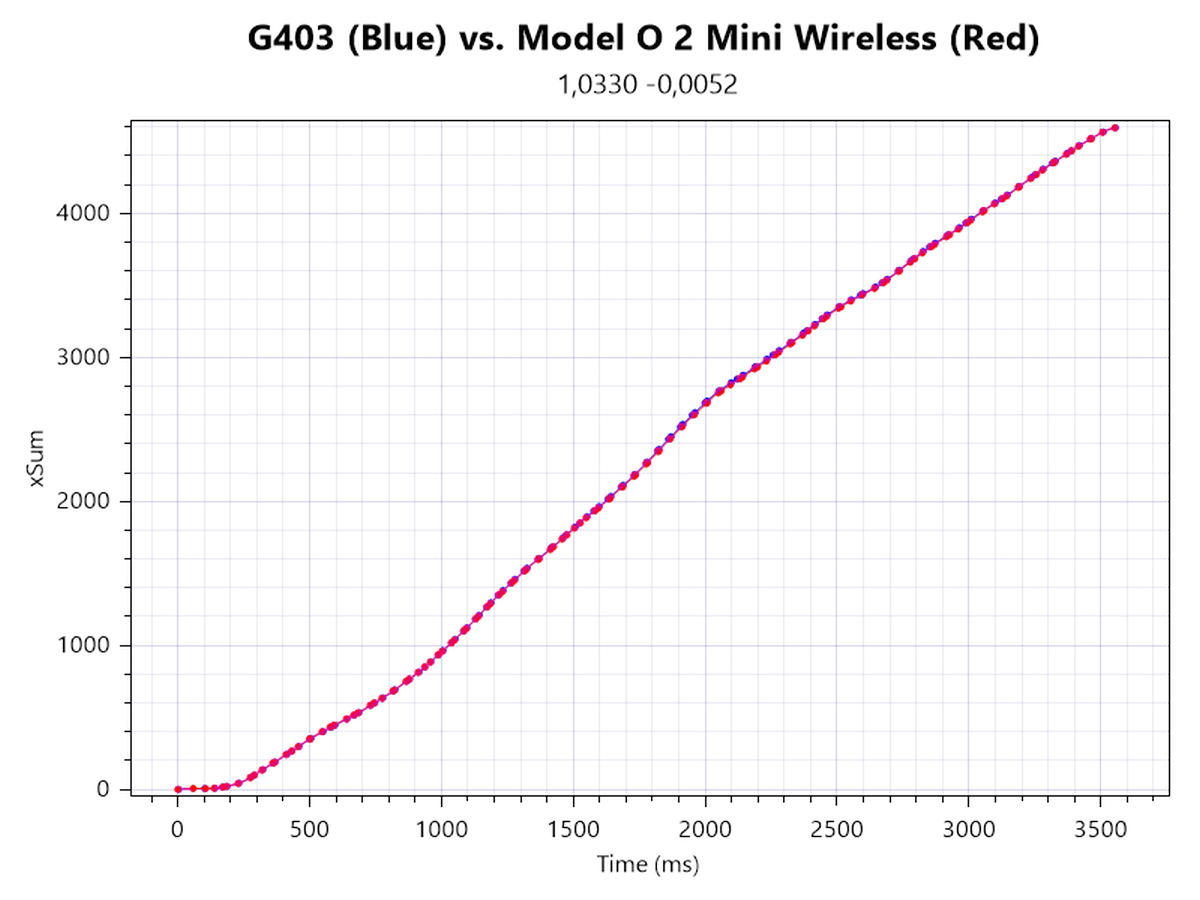
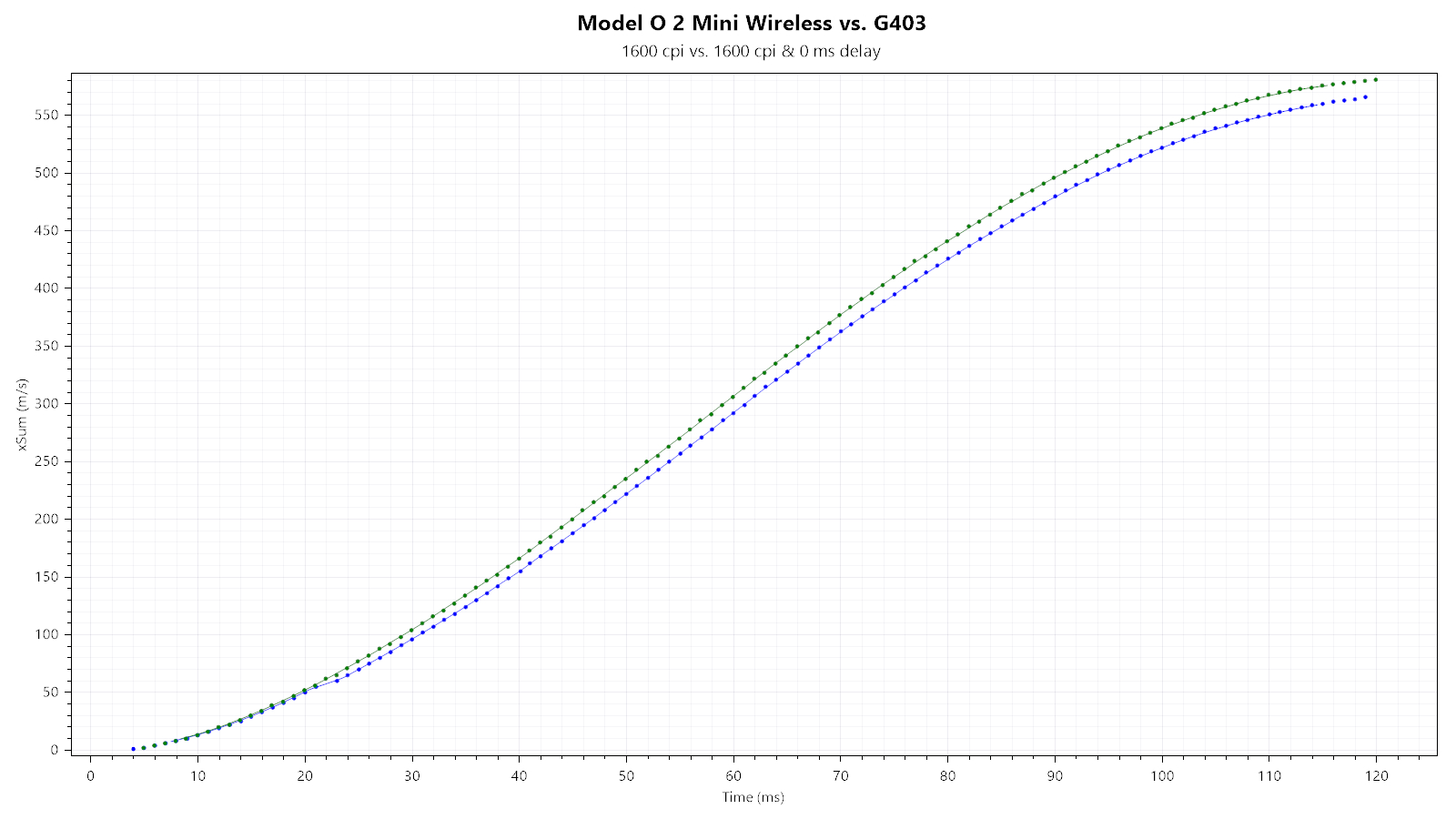
As you can see from the plot, no displacement between the two cursor paths can be observed, which confirms that SRAV is very low.
Perfect Control Speed
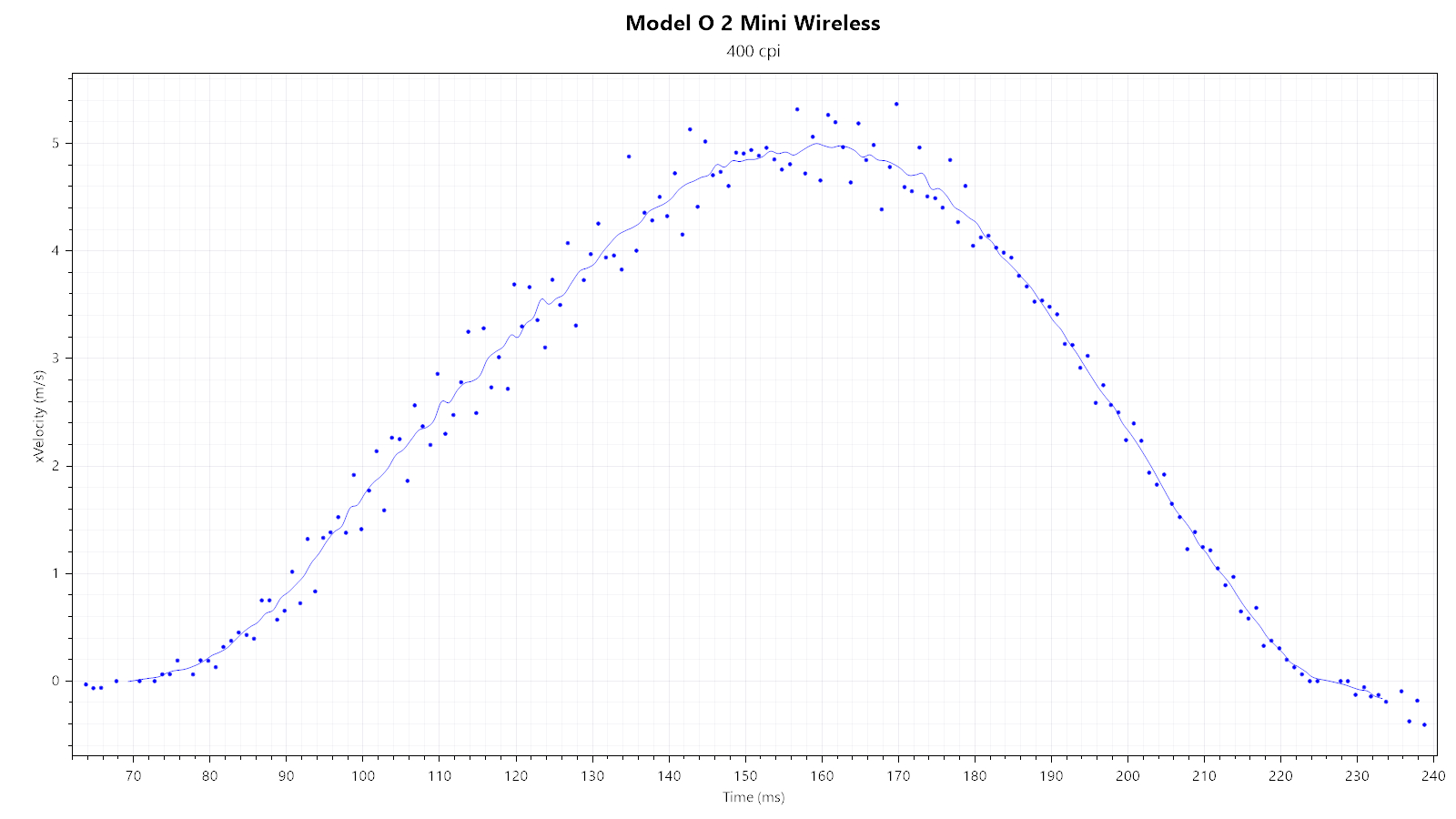
I've only managed to hit a measly 5 m/s, which is within the proclaimed PCS range and causes no observable sensor malfunction.
Polling Rate Stability
Wired testing


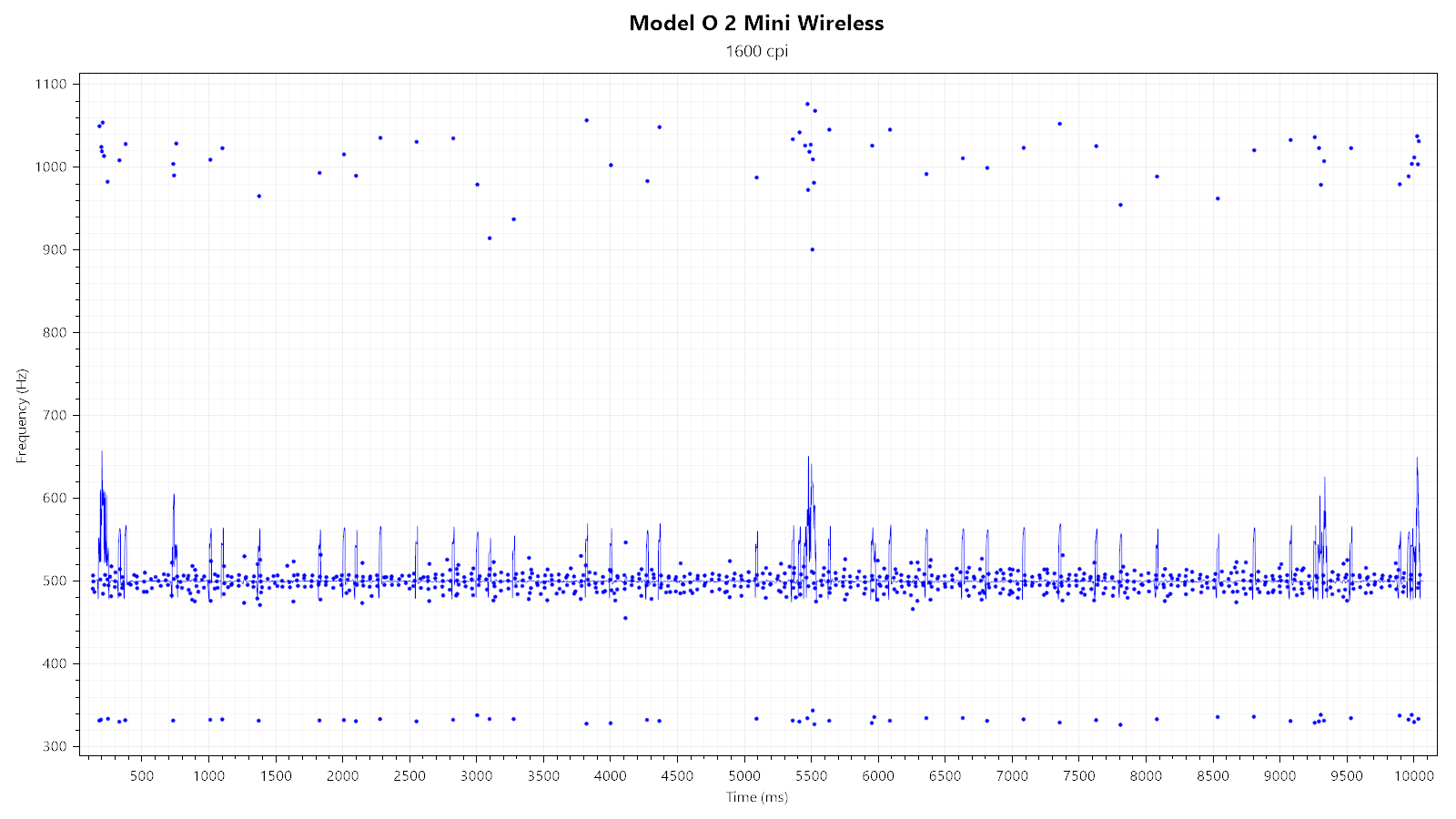
All the available polling rates (125, 250, 500, or 1000 Hz) display periodic off-period polls.
Somewhat curiously, disabling RGB lighting increases the frequency of said off-period polls.
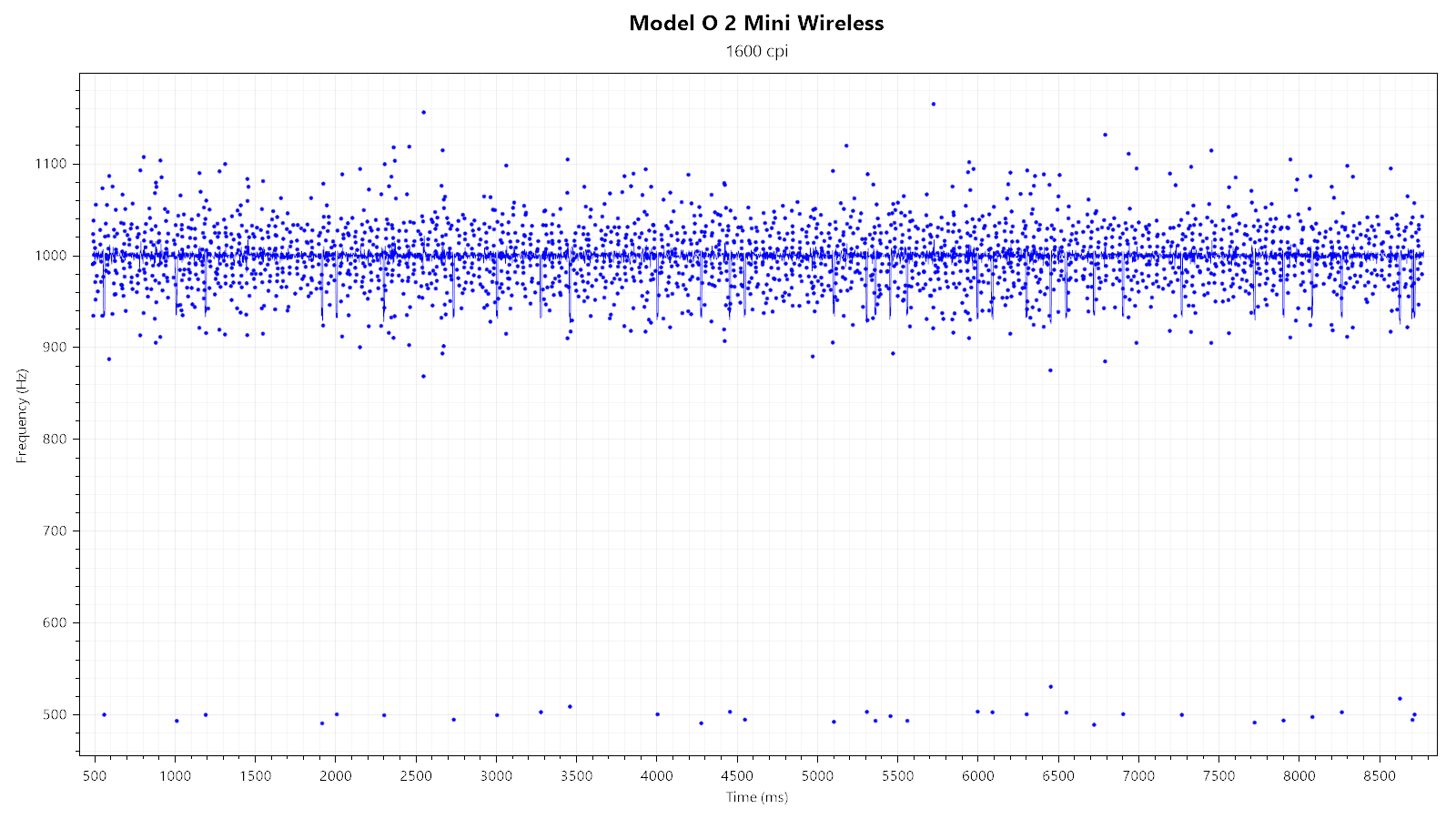
Wireless testing
For wired mice, polling rate stability merely concerns the wired connection between the mouse (SPI communication) and USB. For wireless mice, another device that needs to be kept in sync between the first two is added to the mix: the wireless dongle/wireless receiver. I'm unable to measure all stages of the entire end-to-end signal chain individually, so testing polling-rate stability at the endpoint (the USB) has to suffice here.
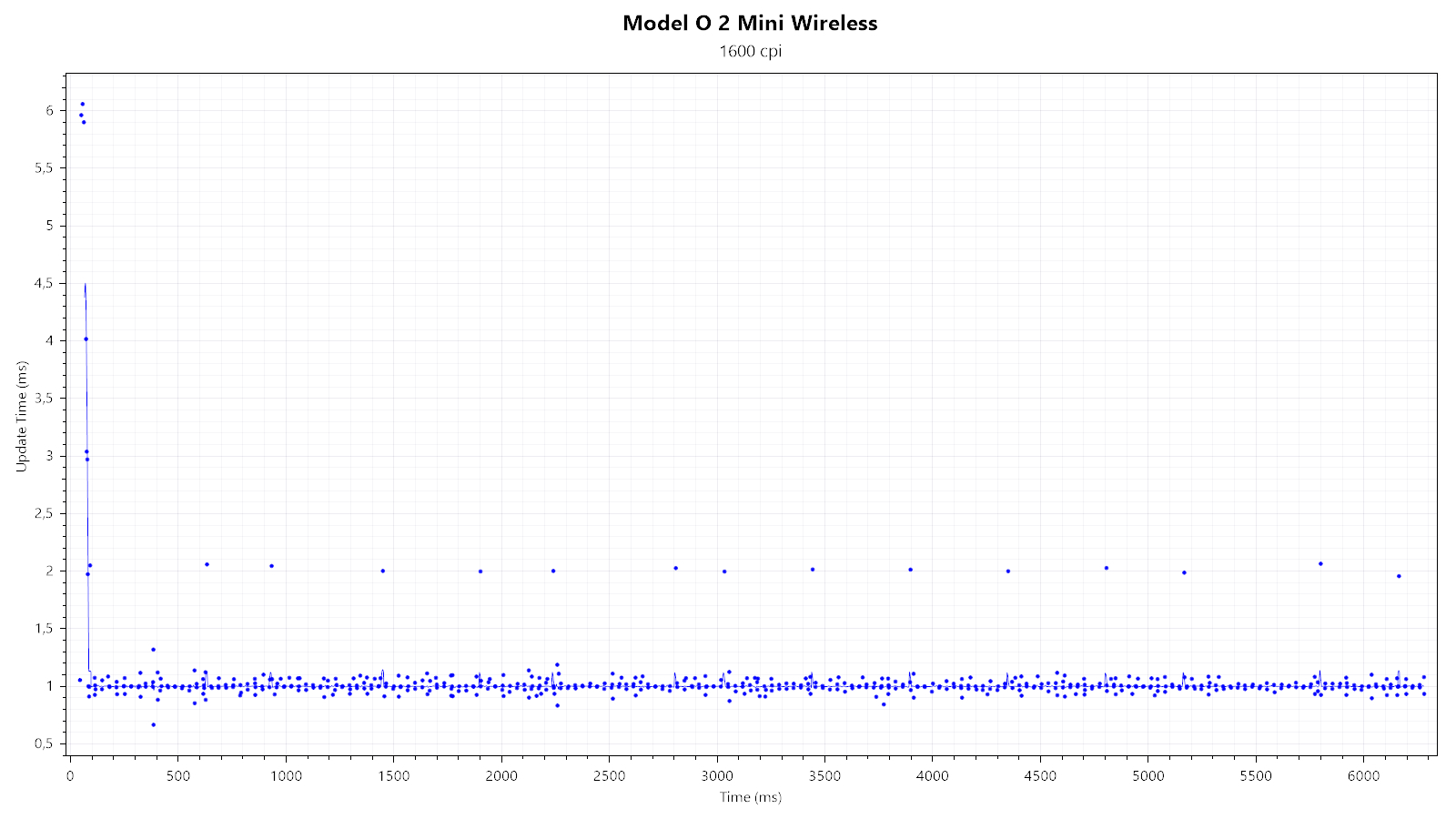
First, I'm testing whether SPI, wireless, and USB communication are synchronized. Any of these being out of sync would be indicated by at least one 2 ms report, which would be the result of any desynchronization drift accumulated over time. Several such 2 ms polls are visible, which may point towards a desynchronization drift.

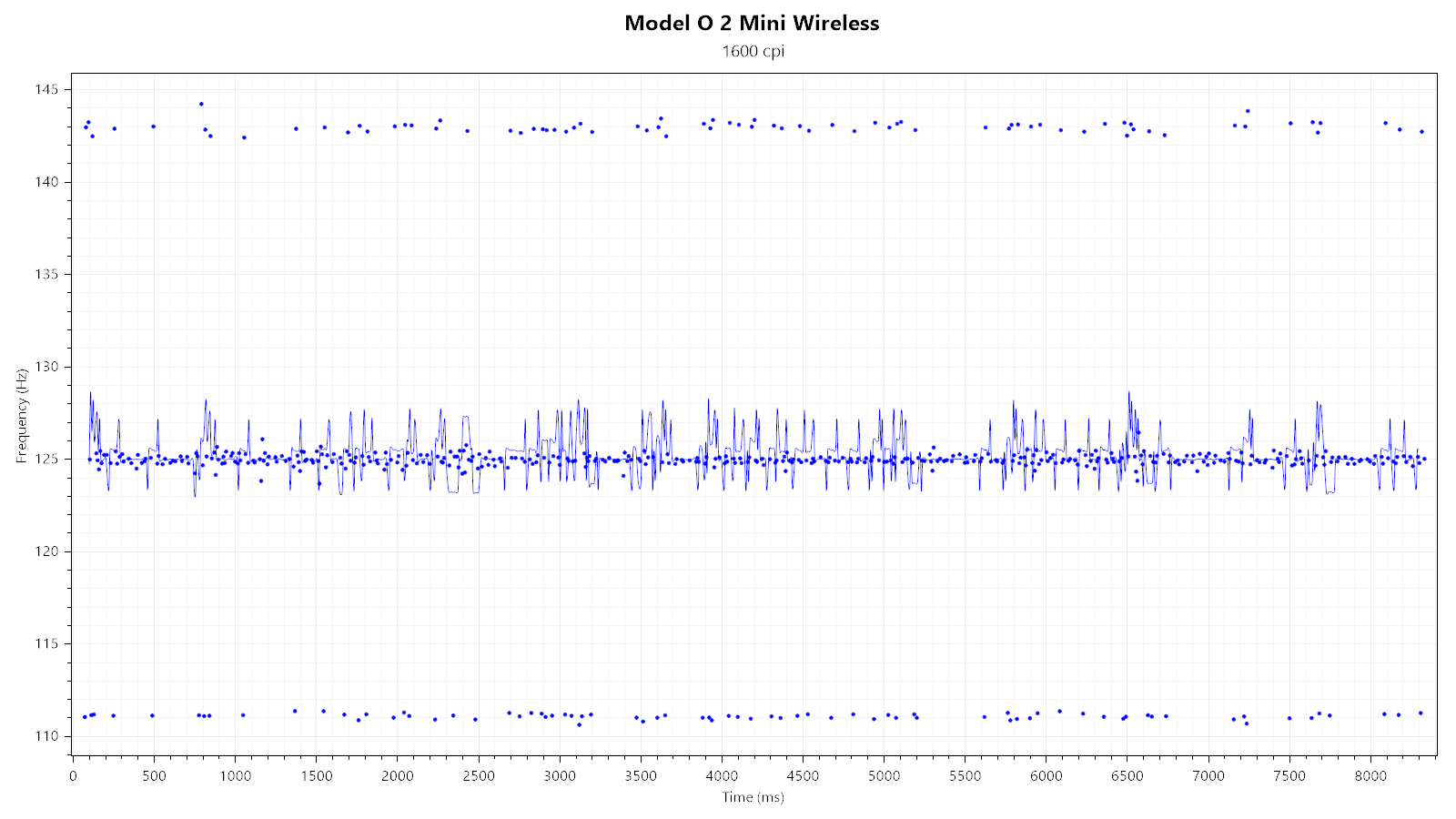
Second, I'm testing the general polling-rate stability of the individual polling rates in wireless mode. Running the Model O 2 Mini Wireless at a lower polling rate can have the benefit of extending battery life. All polling rates display periodic off-period polls.
Paint Test
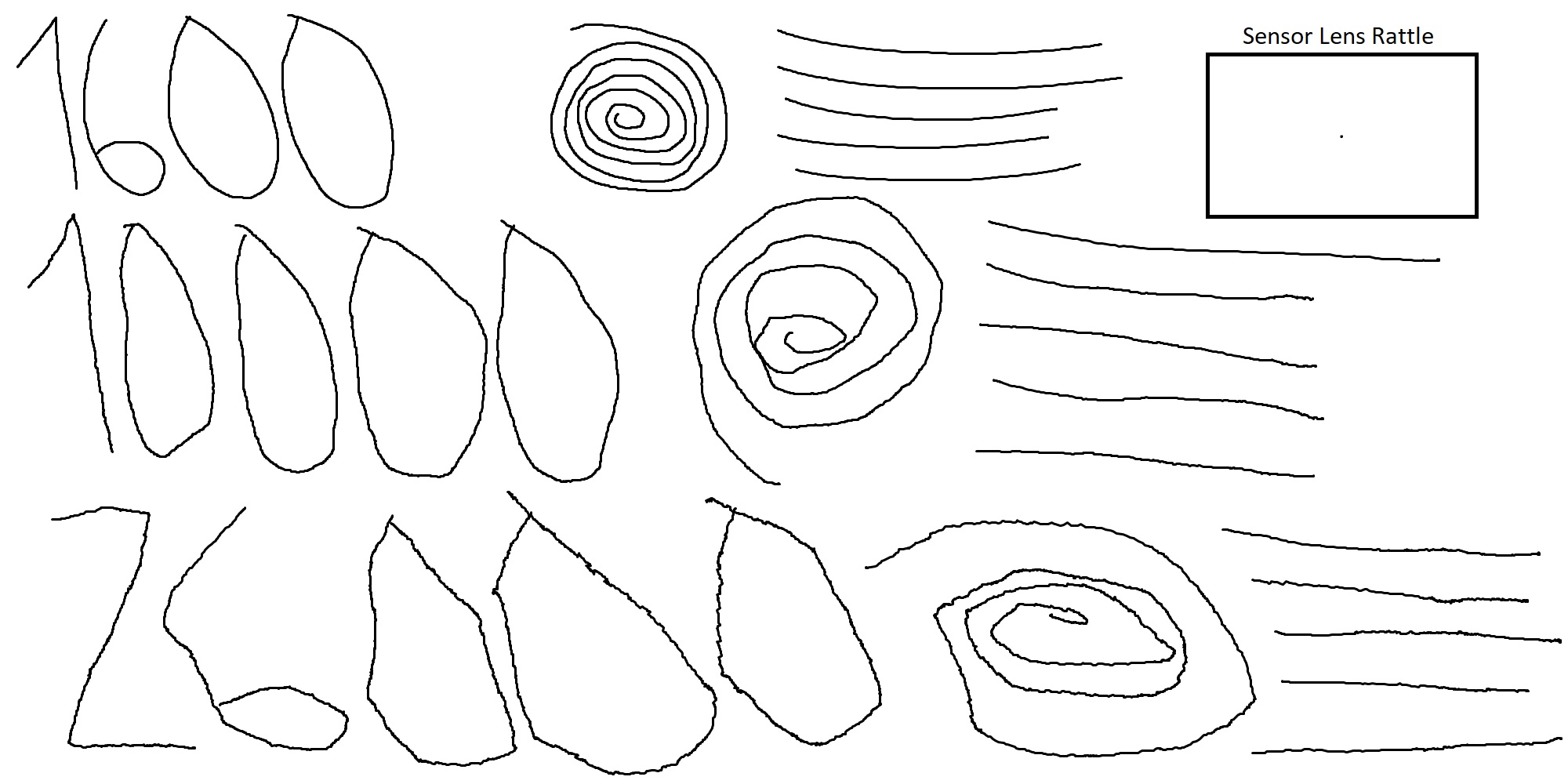
As you can see, no issues with angle snapping can be observed. There is no jitter visible at 1600 CPI. 10,000 CPI already shows minor to moderate jitter, which is amplified to major levels at 26,000 CPI. This is in line with what to expect from a sensor lacking any smoothing. Lastly, there is no lens movement.
Lift-off Distance
The Model O 2 Mini Wireless offers two pre-defined LOD levels. On the "1 mm" setting, the sensor does not track at a height of one DVD. Using the "2 mm" setting, the sensor does track at a height of one DVD, but not at a height of two DVDs (1.2<x<2.4 mm; x=LOD height). Keep in mind that LOD may vary slightly depending on the mousing surface (pad) it is being used on.
Click Latency

In wired mode and using a debounce time of 0 ms, click latency has been measured to be 2.1 ms, with standard deviation being 0.50 ms. Using a debounce time of 2 ms, click latency has been measured to be 4.0 ms, with standard deviation being 0.51 ms.
In wireless mode and using a debounce time of 0 ms, click latency has been measured to be 2.4 ms, with standard deviation being 0.48 ms. Using a debounce time of 2 ms, click latency has been measured to be 4.3 ms, with standard deviation being 0.49 ms.
Keep in mind that these results have been gathered with an interval of 200 ms between each sample. If there is an interval of at least 300 ms between click events and no sensor activity throughout, latency of various degrees is added. In principle, this behavior is similar to the idle delay observed on mice using the CX52850 MCU, albeit less consistent, and the threshold beyond which it occurs is significantly lower. Accordingly, the values given in the graph only apply under specific conditions, and may be considered "best case" numbers that aren't necessarily representative of actual usage. For this reason, results more representative of actual usage are given in the graph as well. These have been gathered with an interval of 400 ms between each sample. At a debounce time of 0 ms, click latency has been measured to be 7.4 ms, with a standard deviation of 3.44 ms. At a debounce time of 2 ms, click latency has been measured to be 7.2 ms, with a standard deviation of 2.57 ms. Debounce time barely matters under these conditions, and due to the exceedingly large variance, the values given above should be taken as approximations.
The main button switches were measured to be running at 3.37 V. I'm not aware of the voltage specifications of the Kailh GM 8.0 (80 M) switches, but I consider it very likely that these are running within specifications.
Nov 29th, 2024 21:54 EST
change timezone
Latest GPU Drivers
New Forum Posts
- Is this a good build? Plz let me know if I am missing any components. (30)
- Dell Workstation Owners Club (3216)
- Problem on PC with BSOD (23)
- Affordable HEDT, is there such a thing? (4)
- TPU's Nostalgic Hardware Club (19597)
- Last game you purchased? (560)
- My First PC Build – Intel vs AMD for Work and Gaming (64)
- AMD RX 7000 series GPU Owners' Club (1258)
- Samsung 870 EVO - Beware, certain batches prone to failure! (1225)
- What Monitor Are You Using For Your Computer (16)
Popular Reviews
- STALKER 2 Performance Benchmark Review - 35 GPUs Tested
- Thermaltake The Tower 600 Review
- Sparkle Arc A770 ROC Review
- Crucial Pro DDR5-5600 CL46 64 GB Review
- STALKER 2: DLSS vs. FSR vs. XeSS Comparison Review
- AMD Ryzen 7 9800X3D Review - The Best Gaming Processor
- be quiet! Light Base 900 DX Review
- STALKER 2 Handheld Performance Review
- Upcoming Hardware Launches 2024 (Updated Nov 2024)
- Endgame Gear XM2 8K Review
Controversial News Posts
- AMD Falling Behind: Radeon dGPUs Absent from Steam's Top 20 (222)
- AMD Ryzen 7 9800X3D Stocks Vaporized in Retail, Being Scalped (154)
- AMD Introduces Next-Generation AMD Ryzen 7 9800X3D Processor, $479, Nov 7 (124)
- Apple and Samsung in the Fray to Acquire Intel: Rumor (123)
- Microsoft Offers $30 Windows 10 Security Extension for Home Users (118)
- TechPowerUp is Hiring a Power Supply (PSU) Reviewer (112)
- Microsoft is Introducing a $349 Mini PC That Streams Windows 11 from the Cloud (106)
- AMD "Zen 6" to Retain Socket AM5 for Desktops, 2026-27 Product Launches (100)