 4
4
Redragon M686 Vampire Elite Review
Software, Lighting & Battery Life »Sensor and Performance
The Redragon M686 Vampire Elite is equipped with the PixArt PAW3335. According to specifications, the 3335 is capable of up to 16,000 CPI, as well as a maximum tracking speed of 400 IPS, which equals 10.16 m/s. Out of the box, five pre-defined CPI steps are available: 1000, 2000, 4000, 8000, and 16,000 CPI.CPI Accuracy
"CPI" (short for counts per inch) describes the number of counts registered by the mouse if it is moved exactly an inch. There are several factors (firmware, mounting height of the sensor not meeting specifications, mouse feet thickness, mousing surface, among others) which may contribute to actual CPI not matching nominal CPI. It is impossible to always achieve a perfect match, but ideally, nominal and actual CPI should differ as little as possible. In this test I'm determining whether this is the case or not. However, please keep in mind that said variance will still vary from unit to unit, so your mileage may vary as well.
I've restricted my testing to the four most common CPI steps, which are 400, 800, 1600, and 3200. As you can see, deviation is weirdly inconsistent. While 400 and 800 CPI are spot on, 1600 and 3200 CPI are way off. An average result overall. In order to account for the measured deviation, steps of 400, 800, 1700, and 3300 CPI have been used for testing.
Motion Delay
"Motion delay" encompasses all kinds of sensor lag. Any further sources of input delay will not be recorded in this test. The main thing I'll be looking for in this test is sensor smoothing, which describes an averaging of motion data across several capture frames in order to reduce jitter at higher CPI values, increasing motion delay along with it. The goal here is to have as little smoothing as possible. As there is no way to accurately measure motion delay absolutely, it can only be done by comparison with a control subject that has been determined to have the lowest possible motion delay. In this case the control subject is a G403, whose 3366 has no visible smoothing across the entire CPI range.Wired Testing
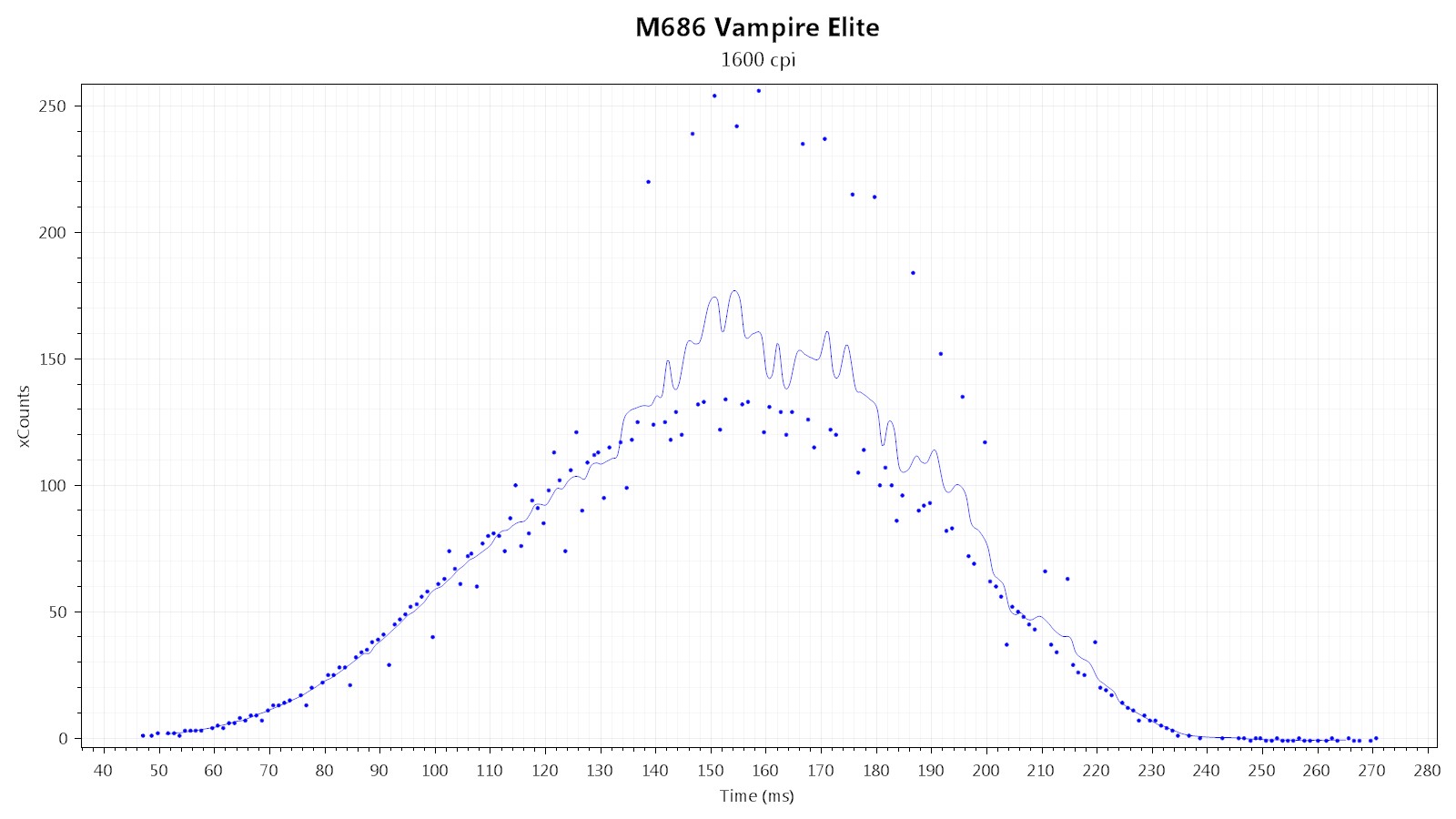
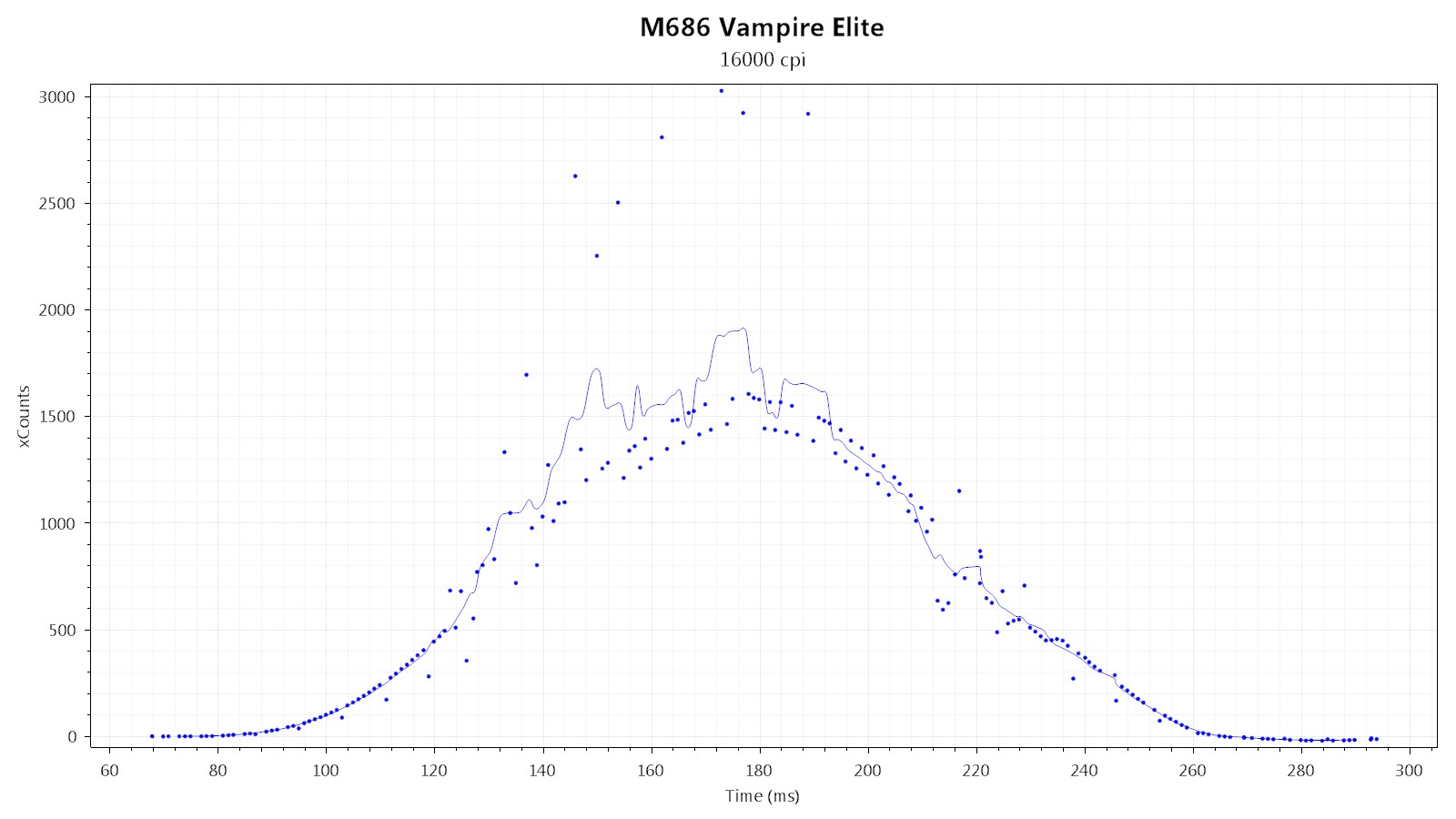
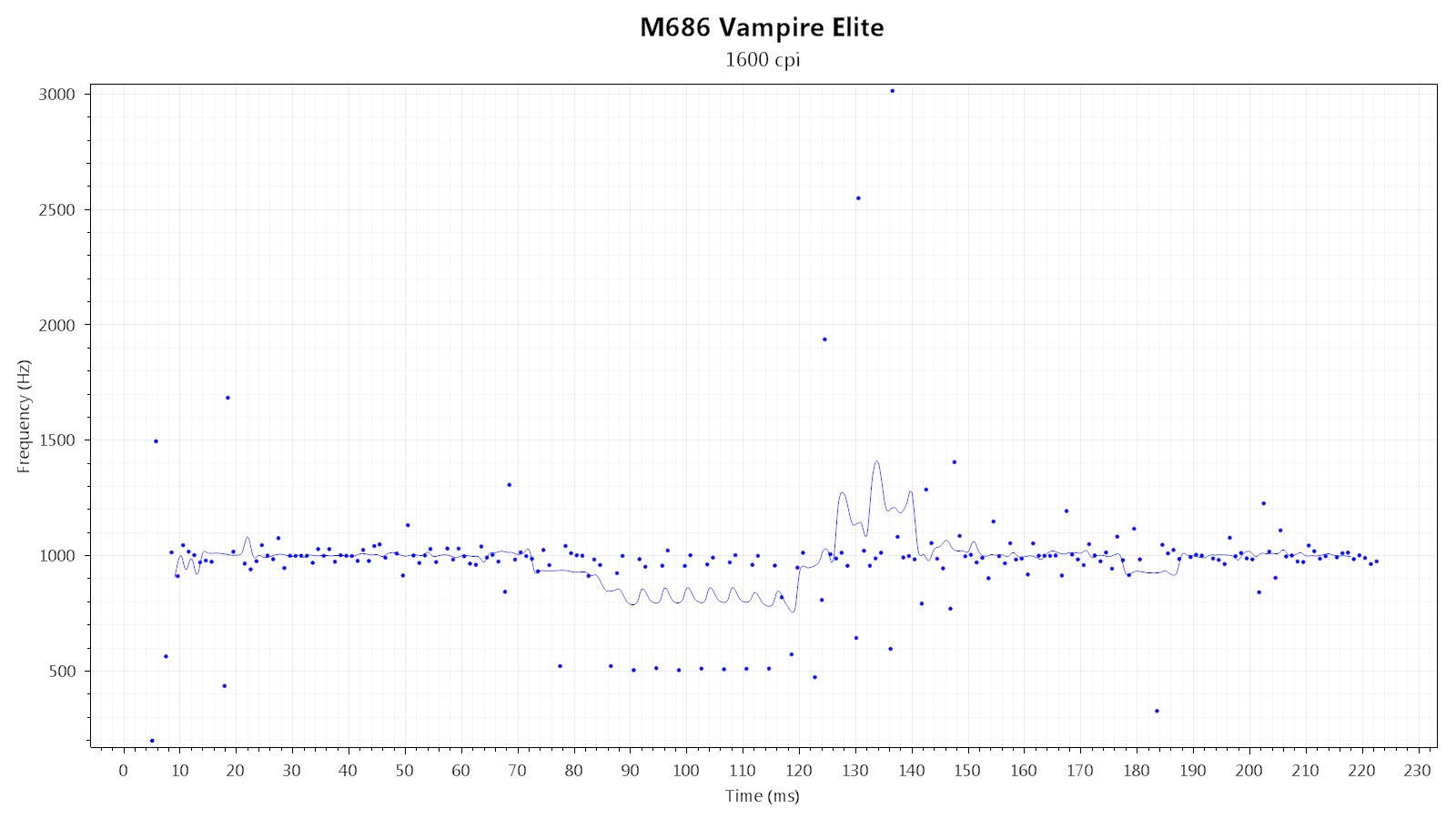
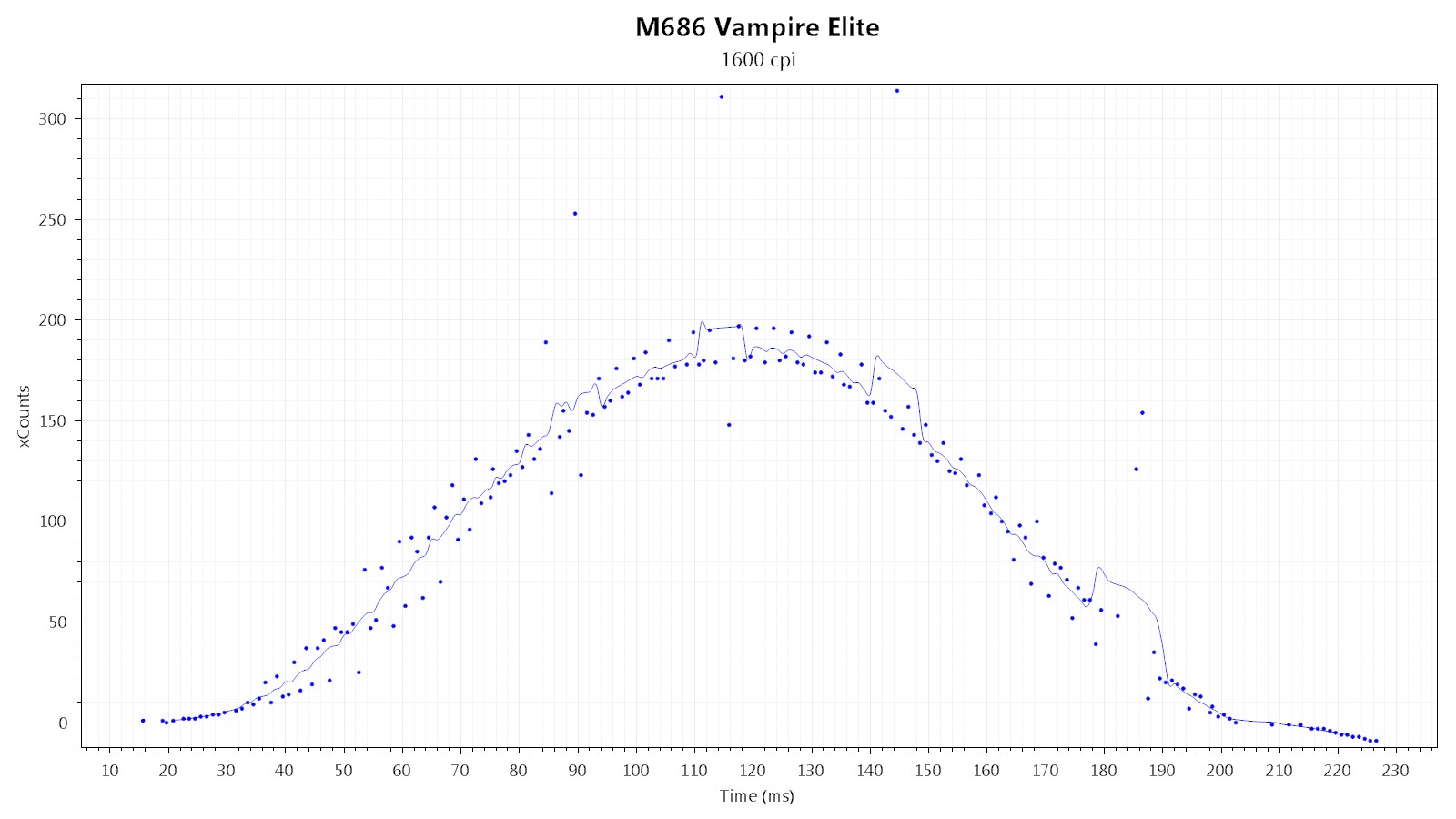
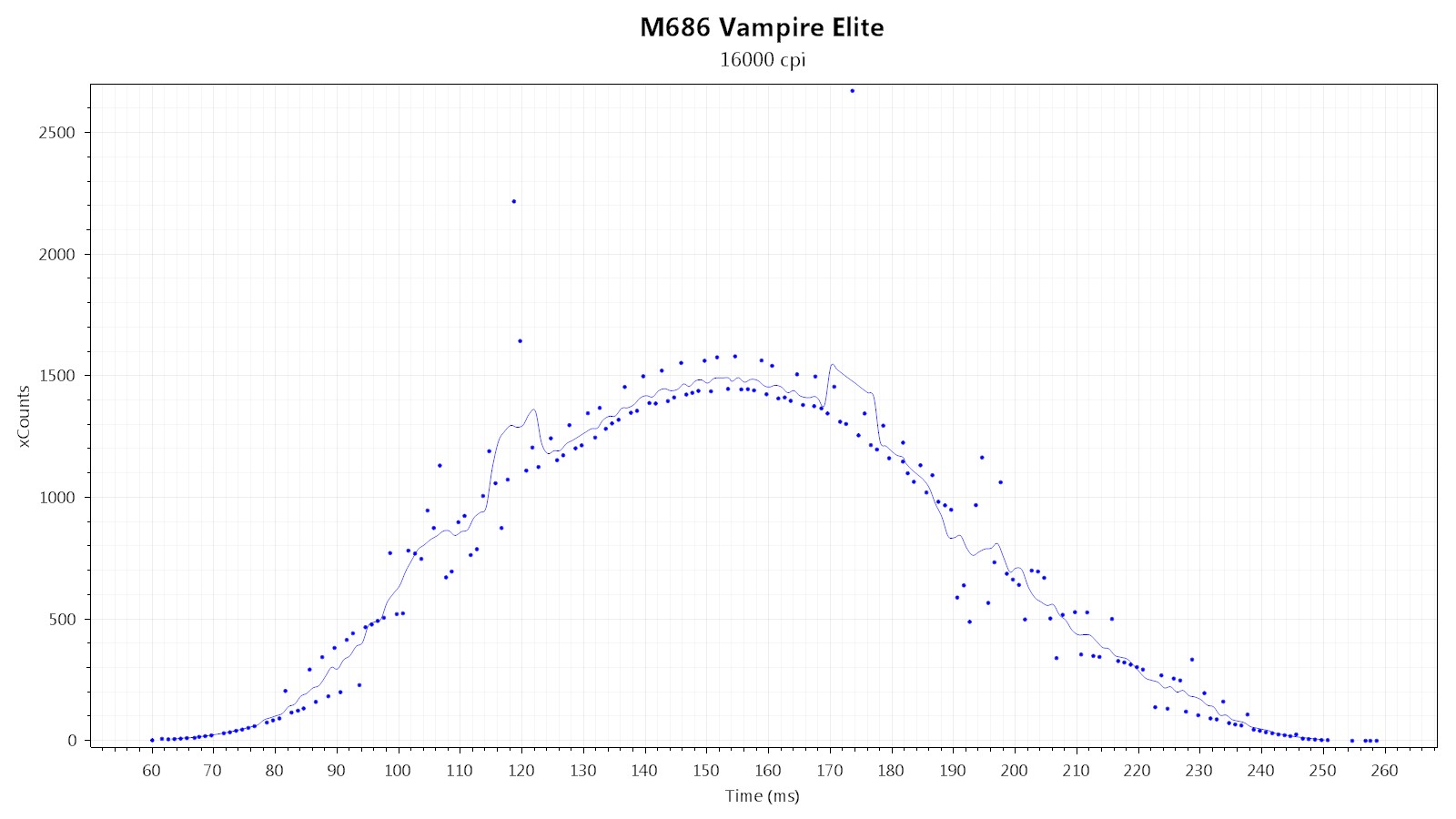
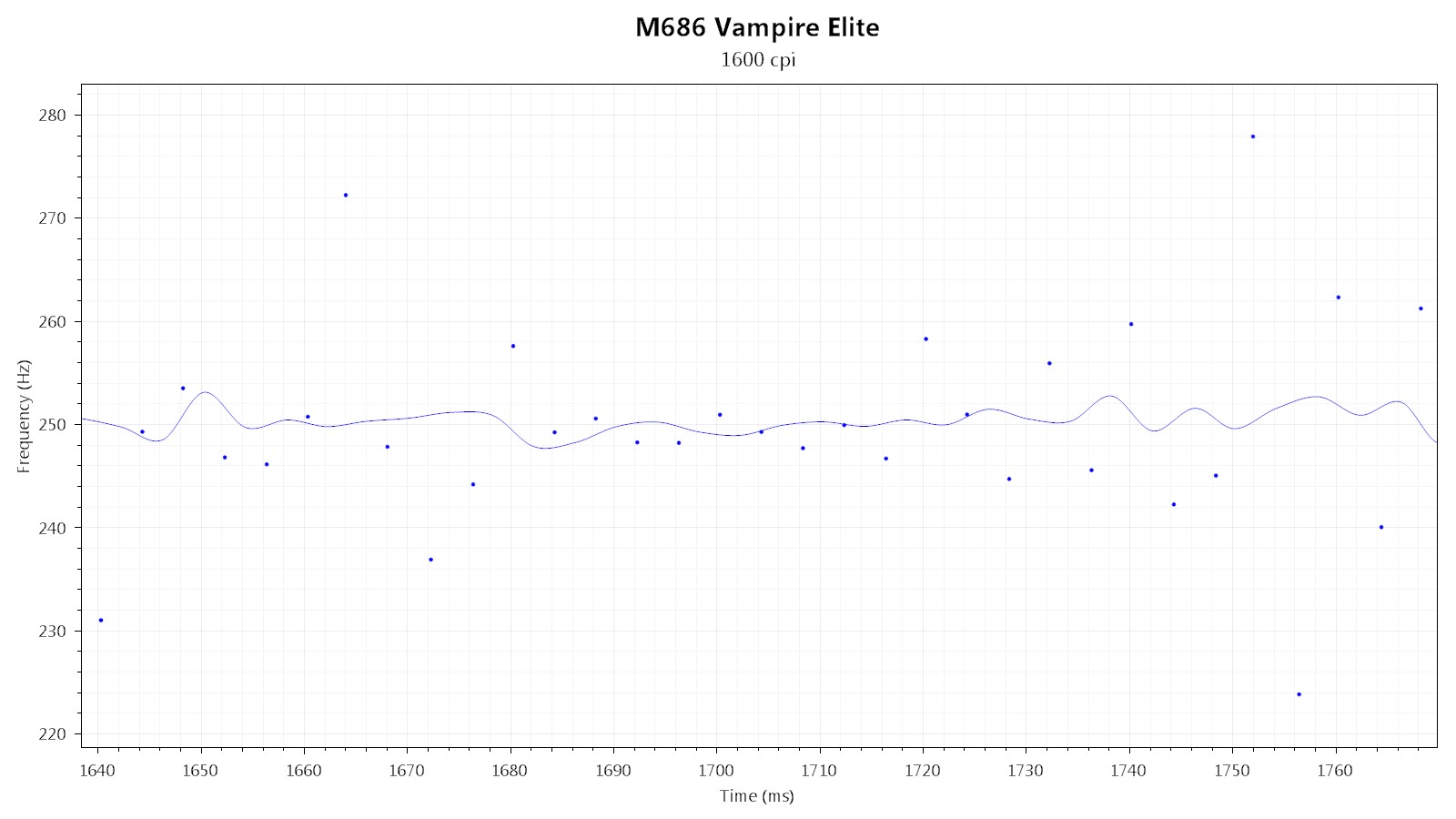
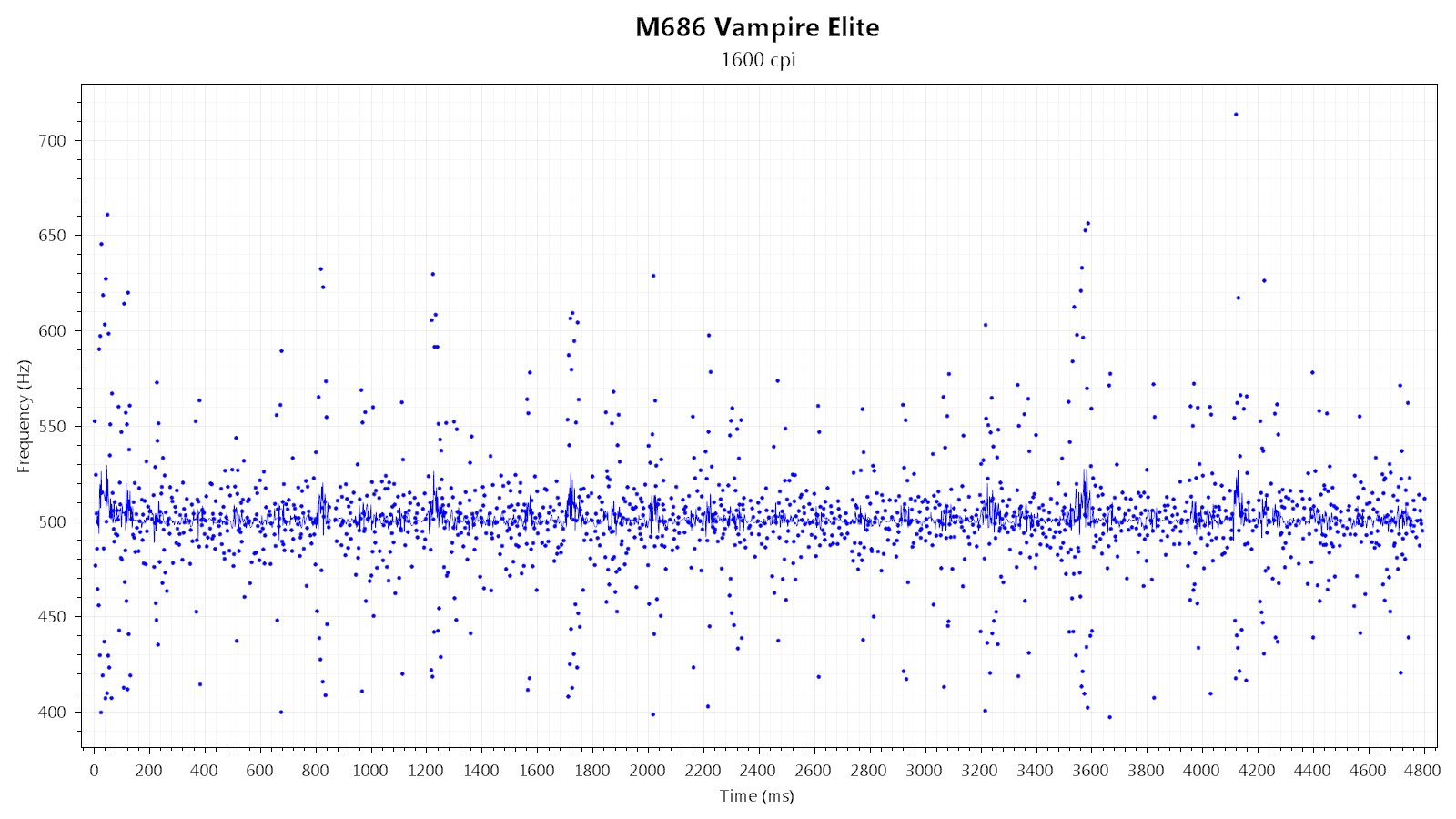
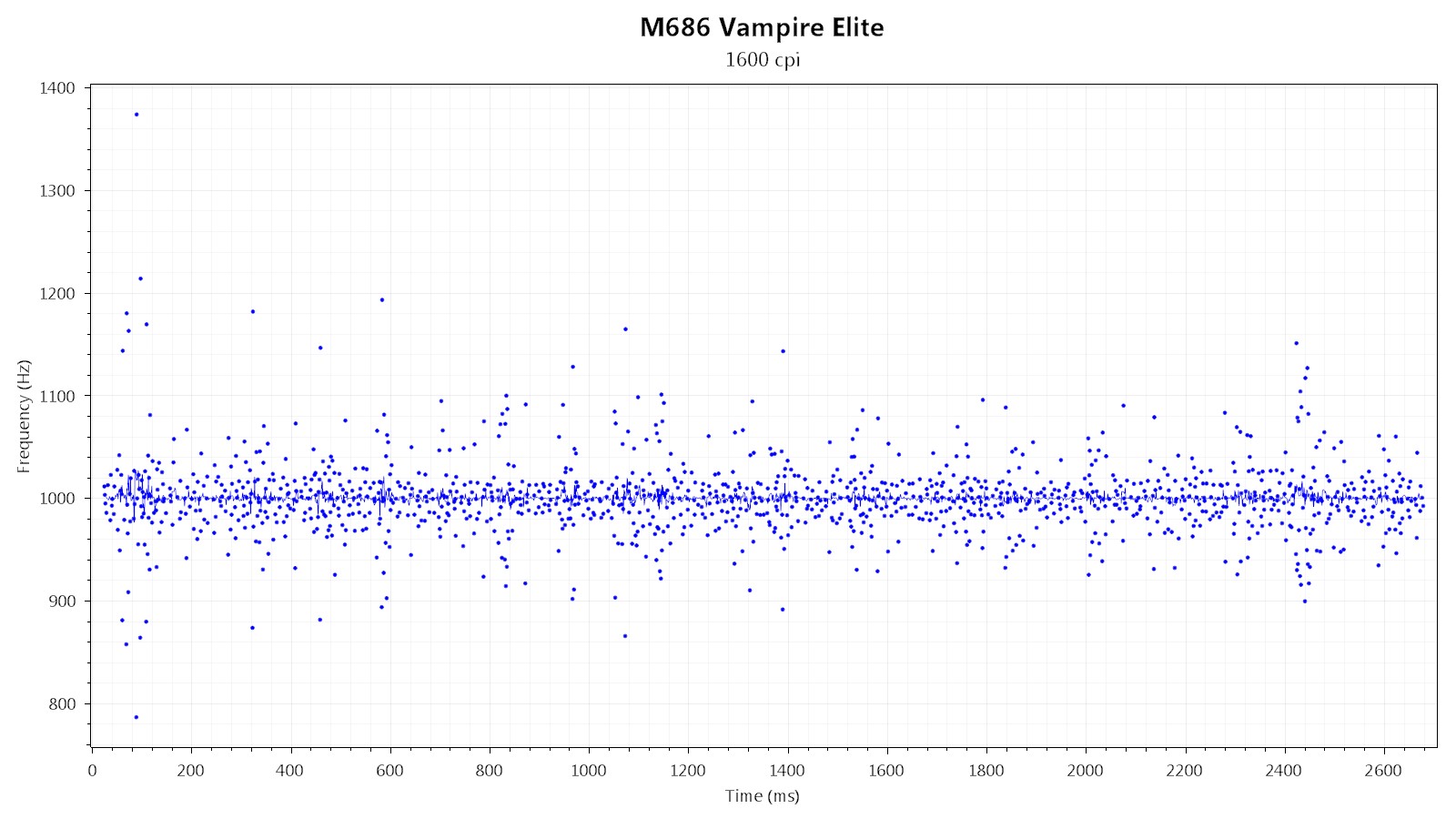
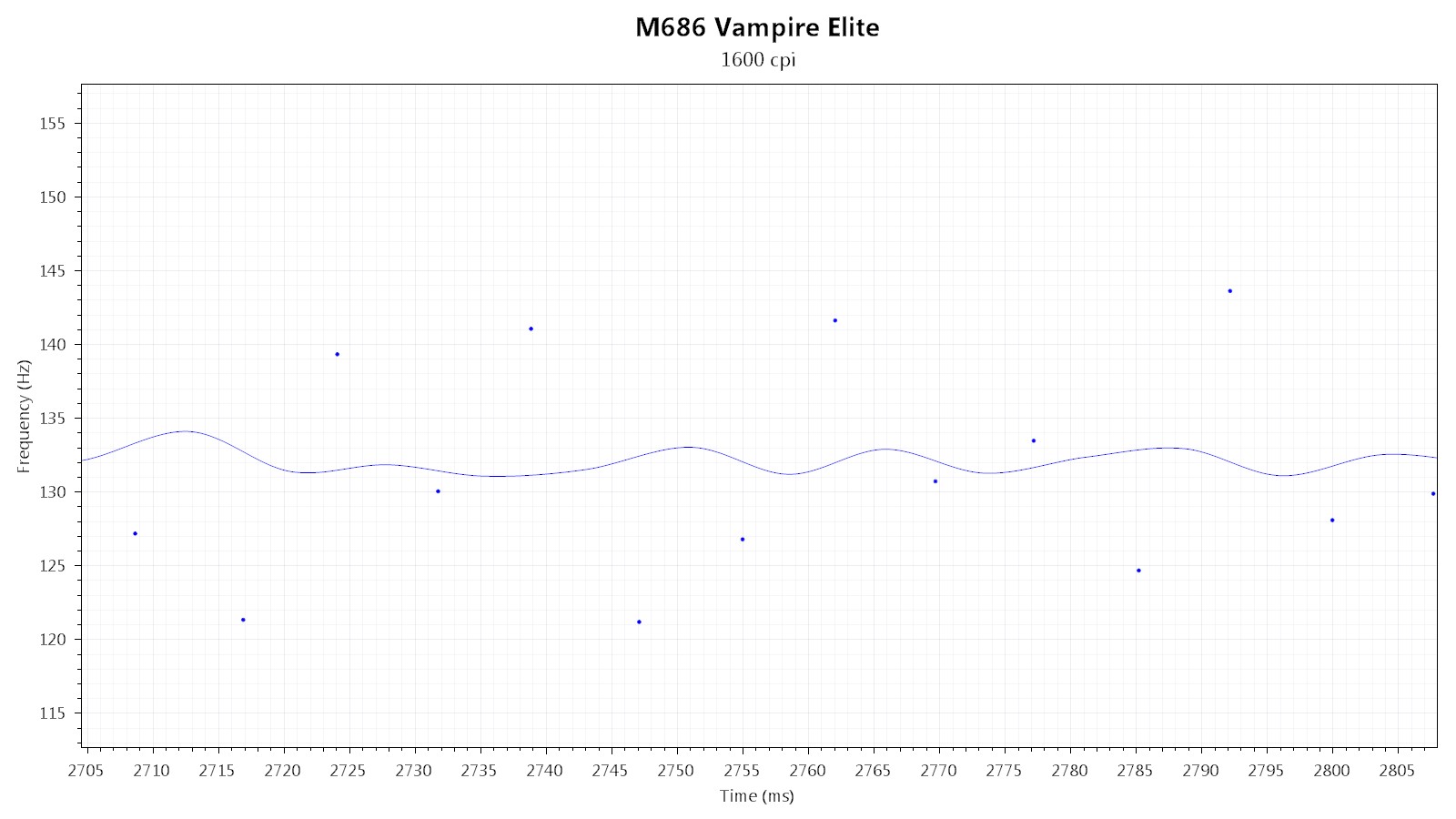
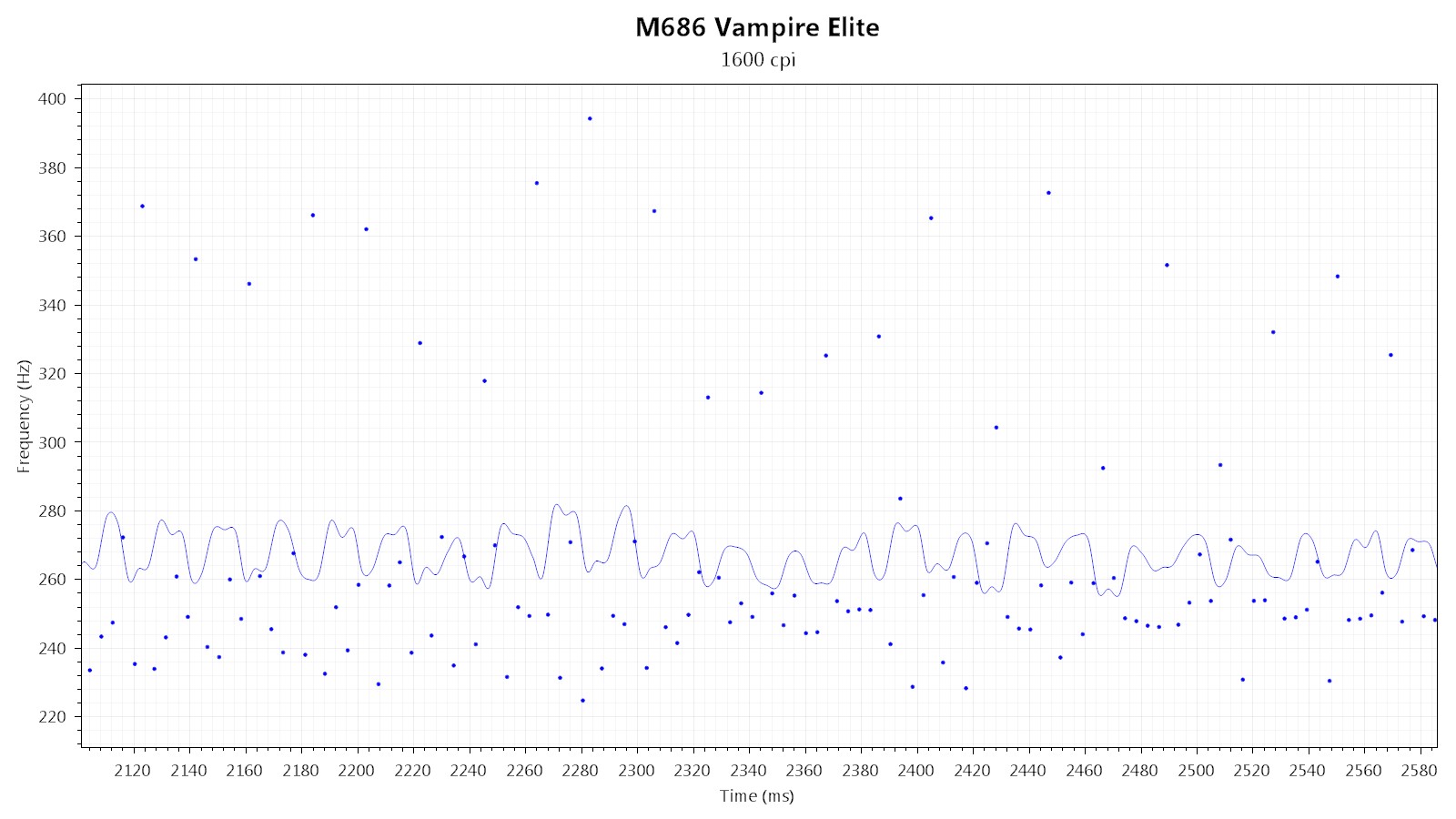
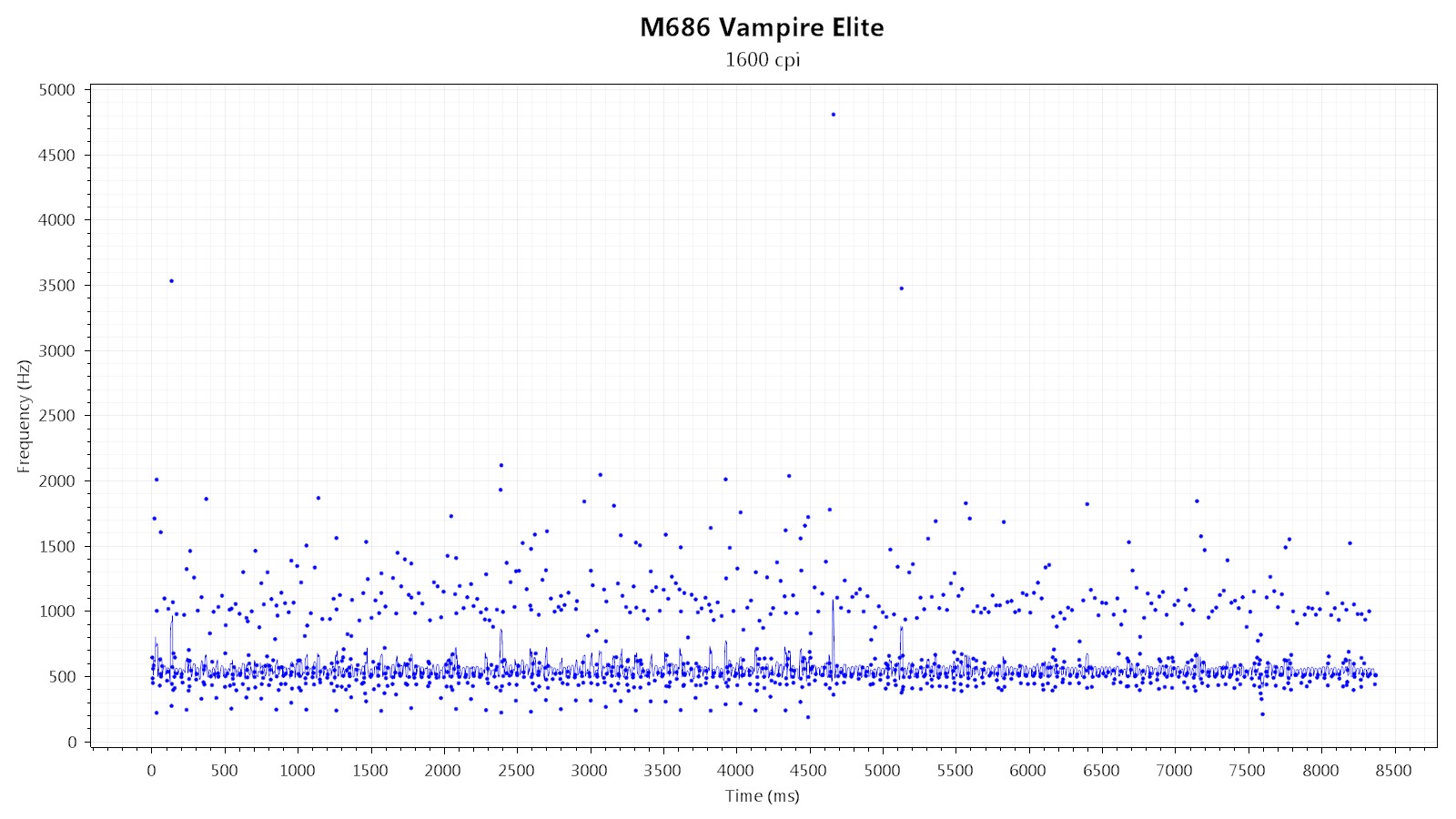
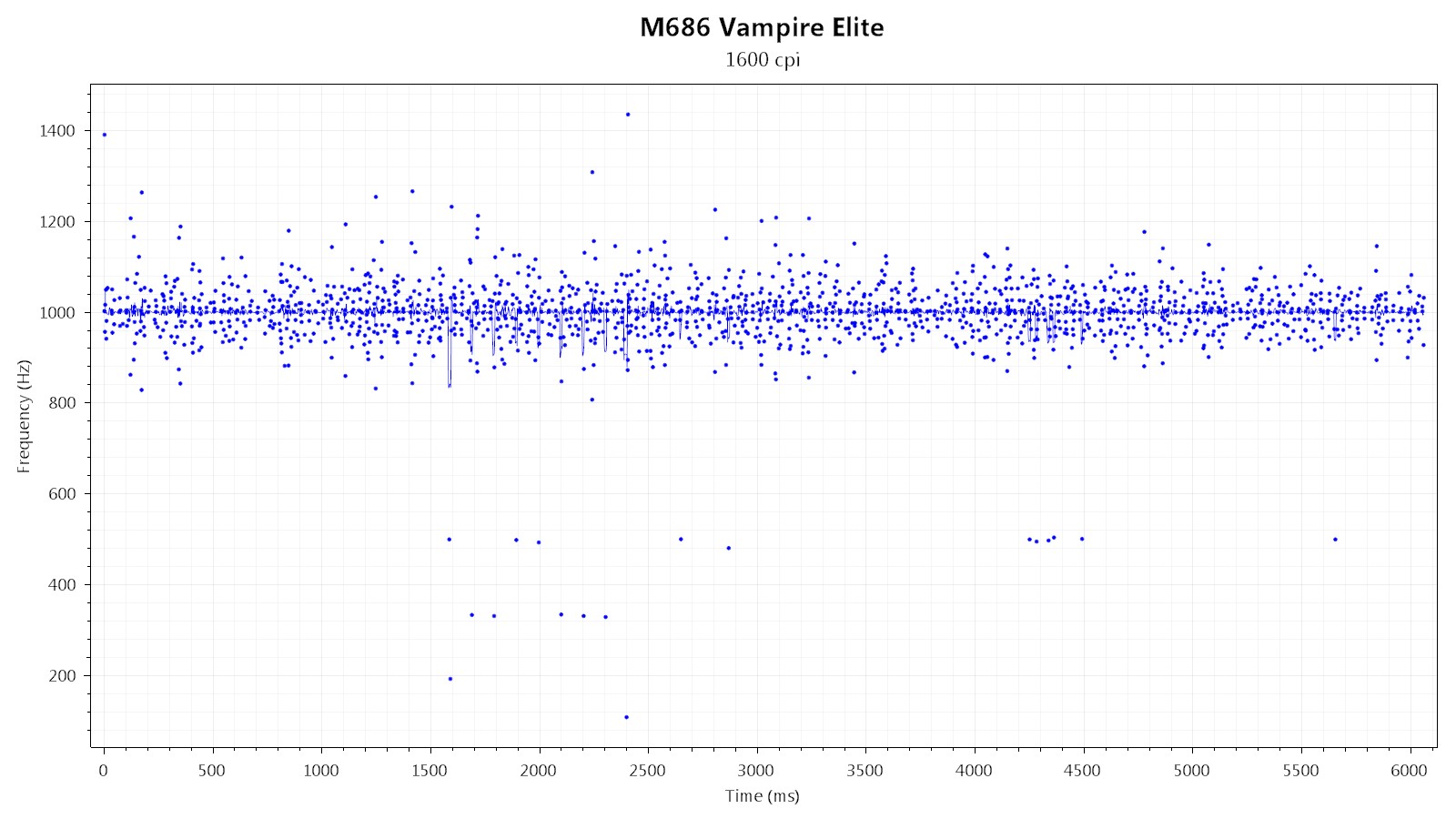
First, I'm looking at two xCounts plots—generated at 1600 and 16,000 CPI—to quickly gauge whether there is any smoothing present, which would be indicated by any visible "kinks." As you can see, both plots show such kinks, but it's difficult to determine whether those kinks are due to smoothing or something else. Looking at the frequency plot below, however, we can see that these kinks correspond to polling outliers:
The 16,000 CPI plot still shows more kinks, which is likely due to smoothing at that step.
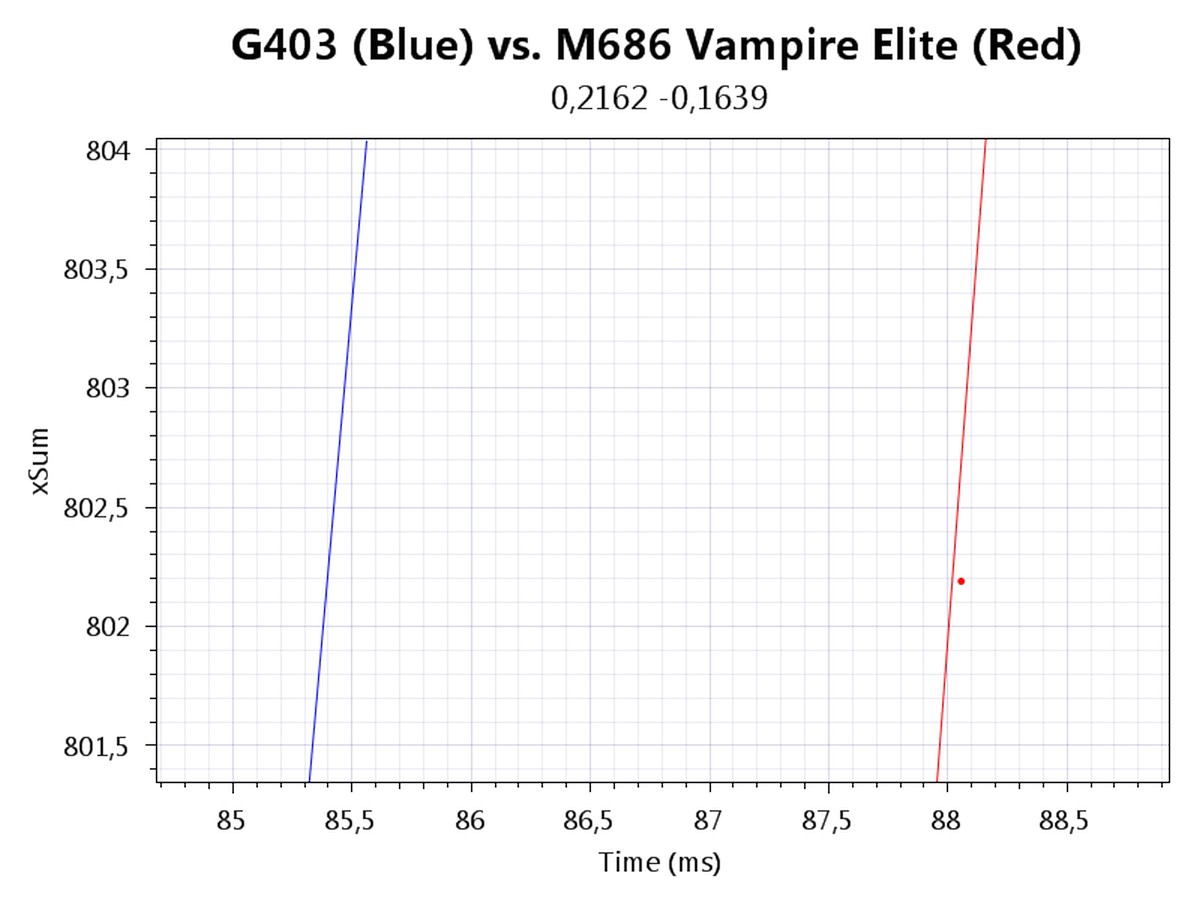
Let us take a look at two additional xSum plots, generated at 1600 and 16,000 CPI. The line further to the left denotes the sensor with less motion delay. At 1600 CPI, motion delay is roughly 1 ms. At 16,000 CPI, motion delay is roughly 2.5 ms. What we're seeing at 1600 CPI is likely some sort of base delay, while 16,000 CPI has smoothing on top.
Wireless Testing
Tracking in wireless mode doesn't change much. The polling outliers are less extreme but more frequent. The 16,000 CPI plot looks messier yet again, which is likely due to the added smoothing at that step.
Keeping the delays established above in mind, I can measure a wireless delay of roughly 3 ms. The amount of smoothing at 16,000 CPI appears to be increased compared to wired mode, which results in a greater delay.
Speed-Related Accuracy Variance (SRAV)
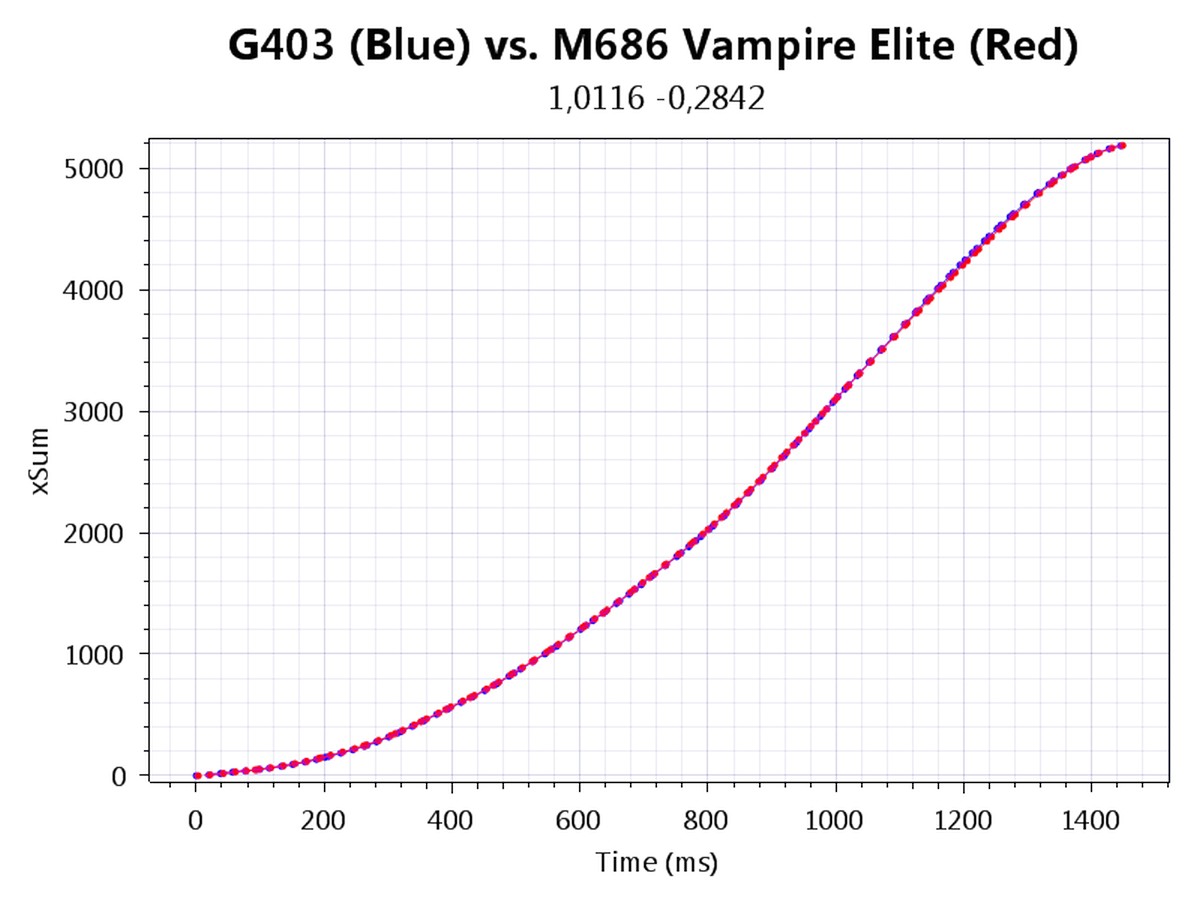
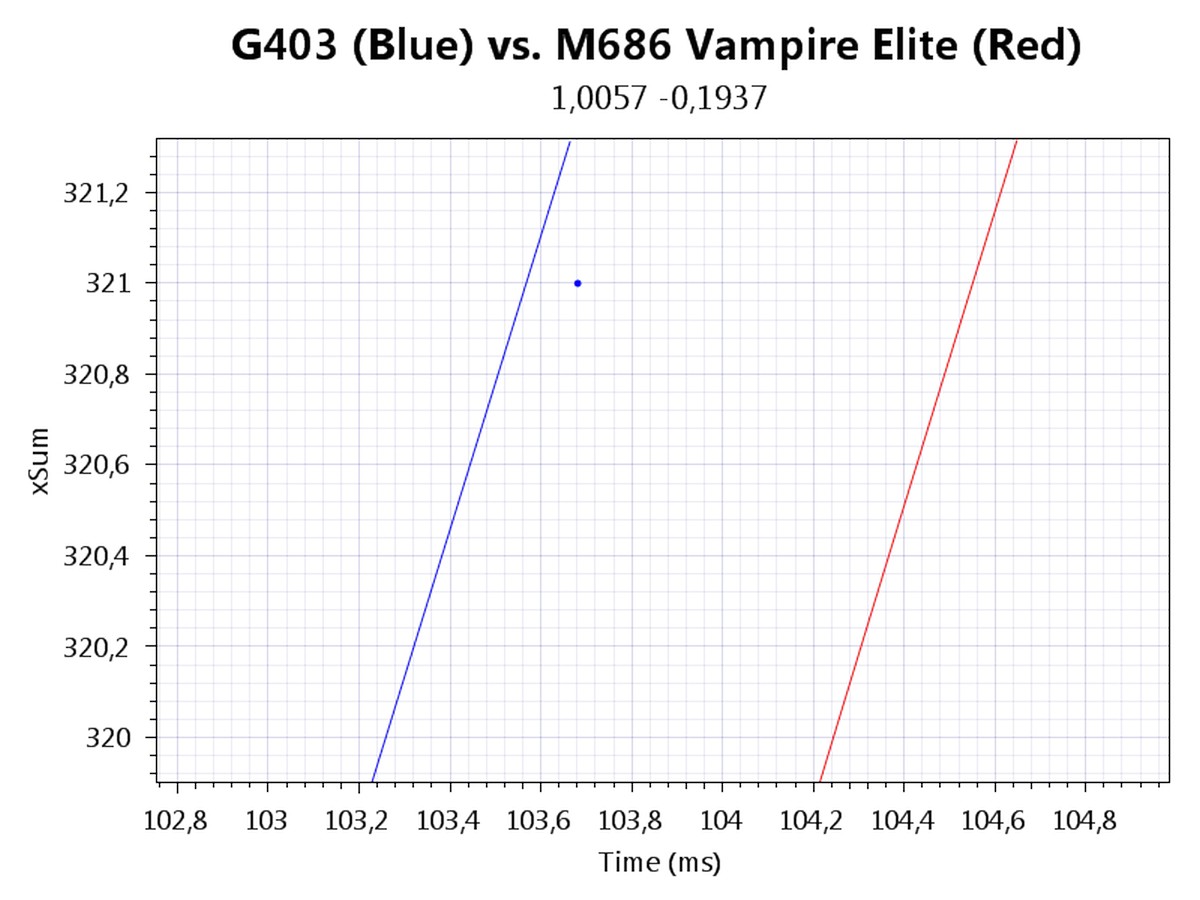
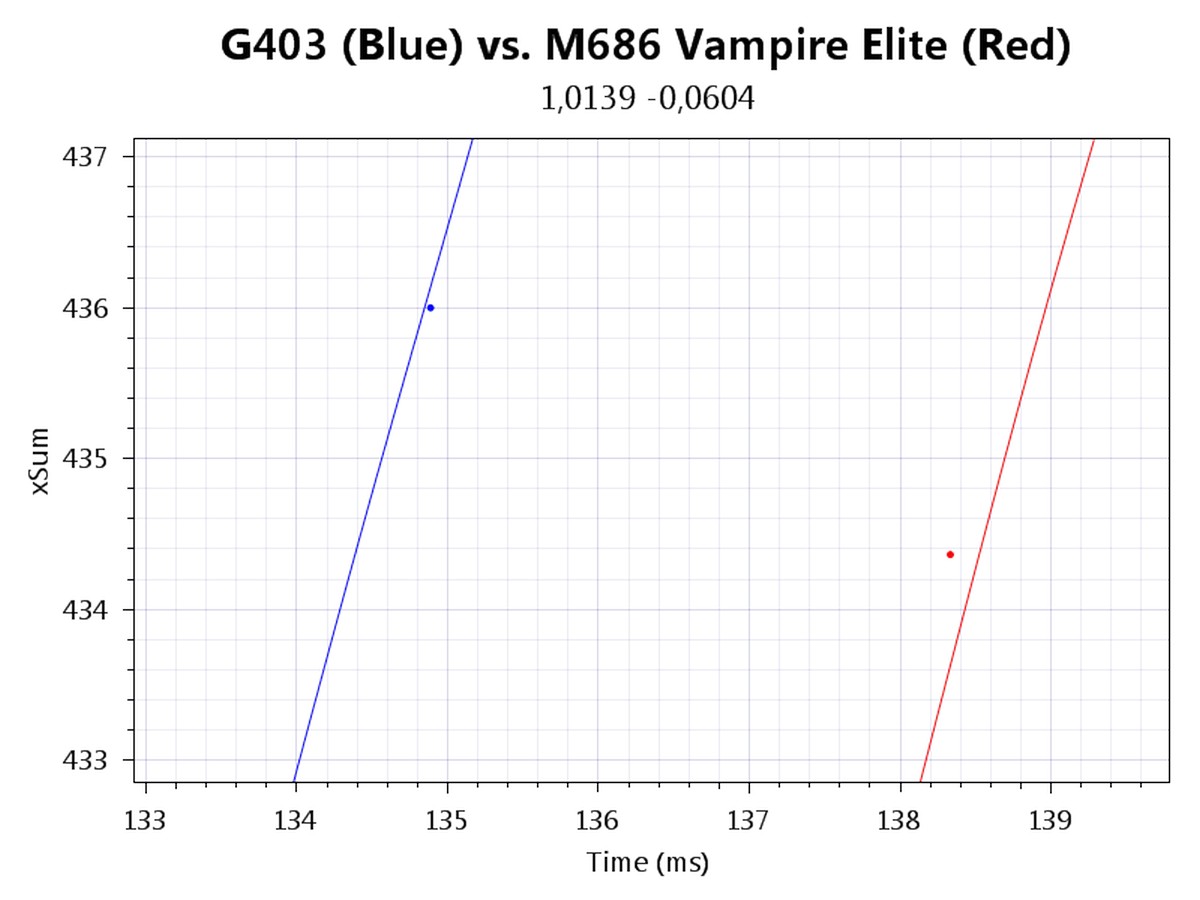
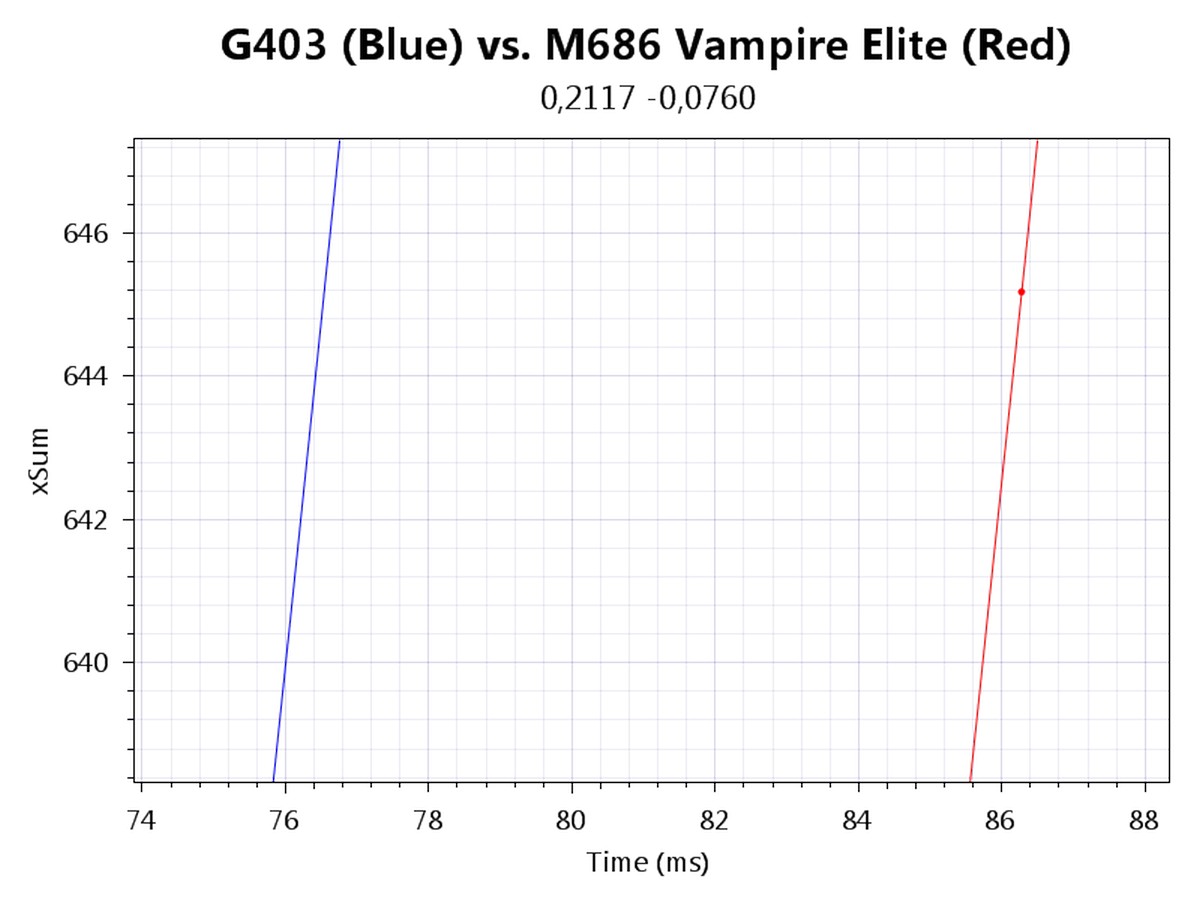
What people typically mean when they talk about "acceleration" is speed-related accuracy variance (or short SRAV). It's not about the mouse having a set amount of inherent positive or negative acceleration, but about the cursor not traveling the same distance if the mouse is moved the same physical distance at different speeds. The easiest way to test this is by comparison with a control subject that is known to have very low SRAV, which in this case is the G403. As you can see from the plot, no displacement between the two cursor paths can be observed, which confirms that SRAV is very low.
Perfect Control Speed
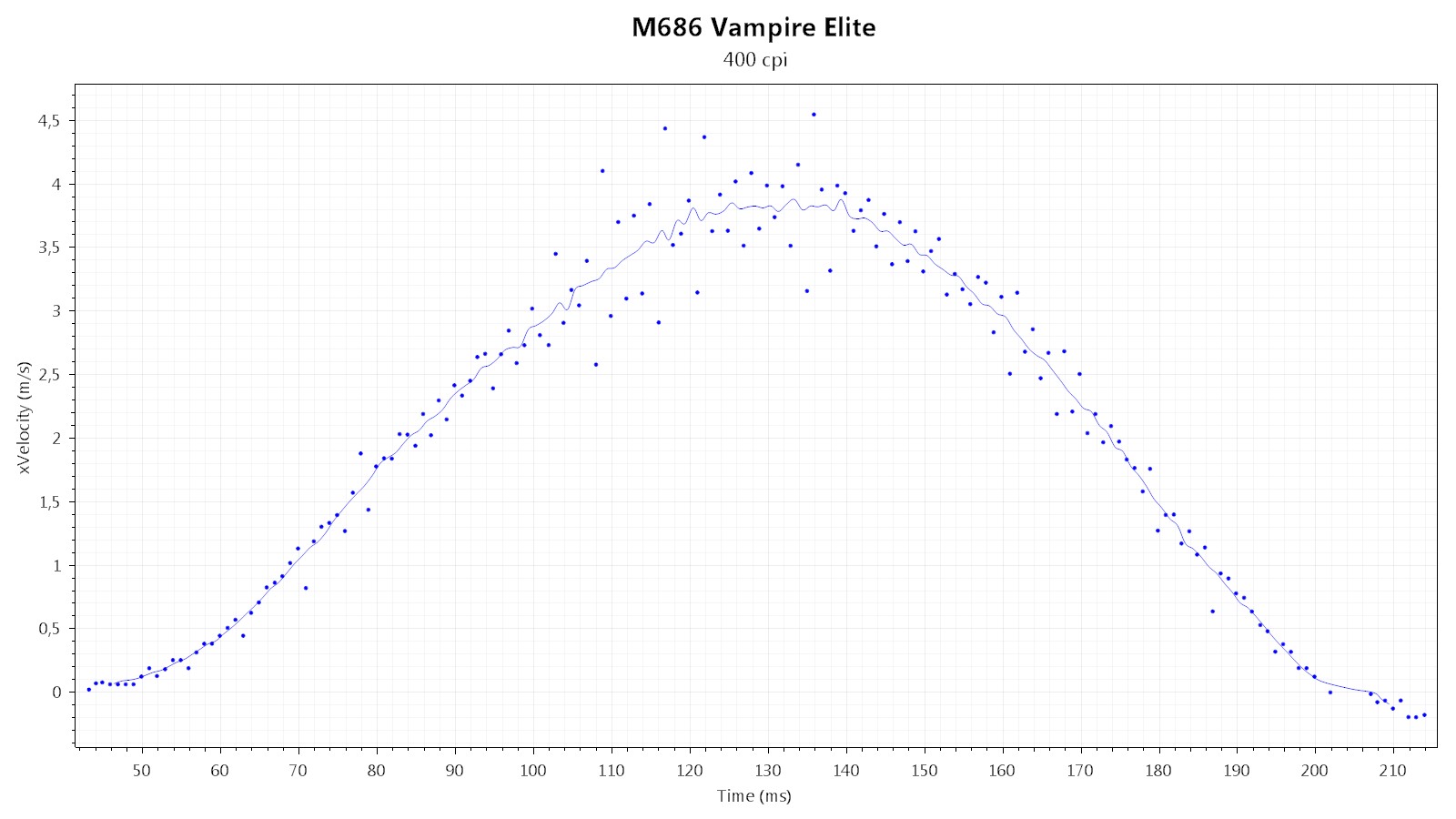
Perfect Control Speed (or PCS for short) is the maximum speed up to which the mouse and its sensor can be moved without the sensor malfunctioning in any way. I've only managed to hit a measly 4.0 m/s (which is within the proclaimed PCS range), at which no sign of the sensor malfunctioning can be observed.
Polling Rate Stability
Since the M686 Vampire Elite shows a rather curious polling profile, I'll be testing both wired and wireless polling stability. Let's take a look at wired performance first.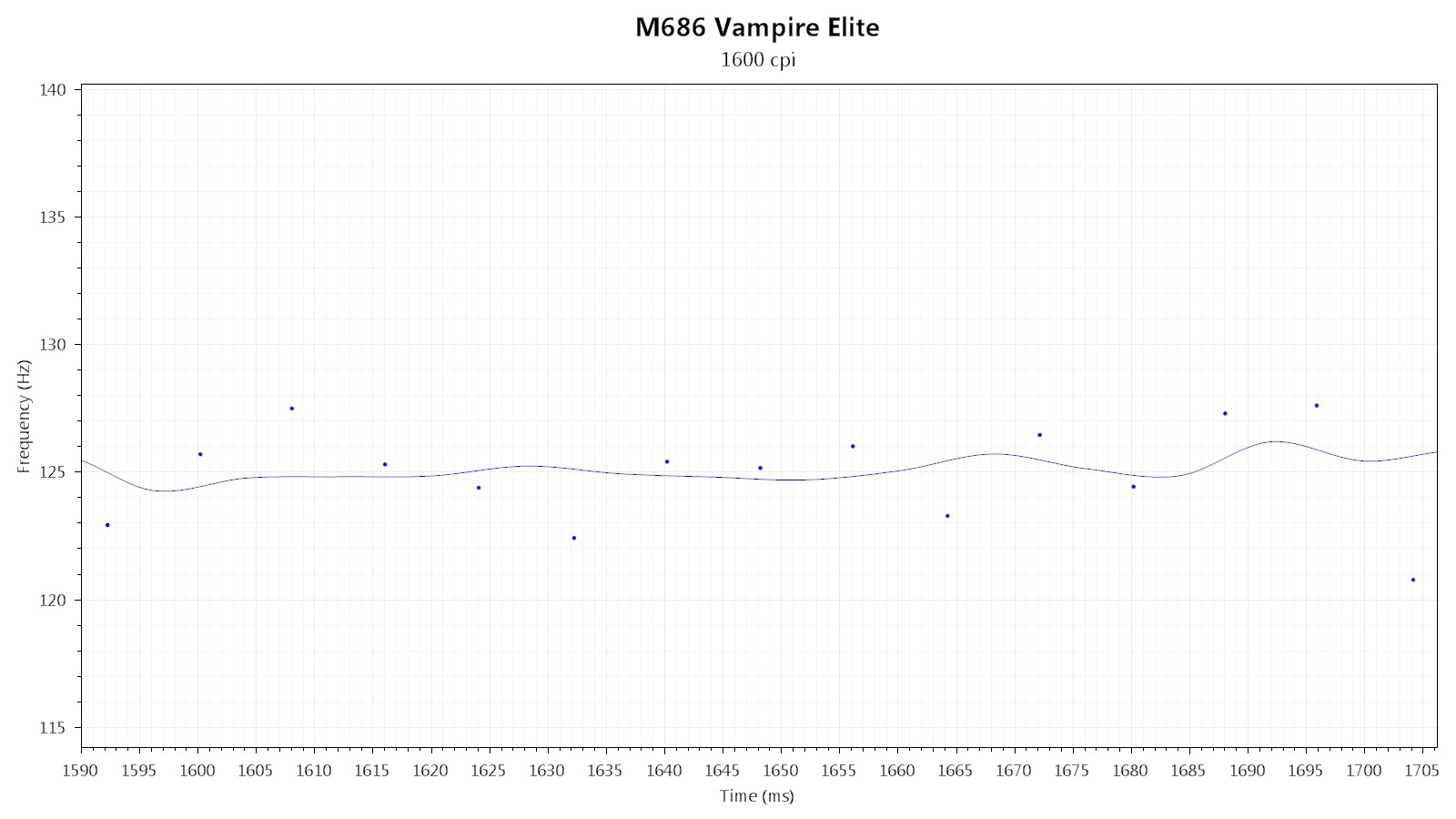
While 125 and 250 Hz look reasonable enough, both 500 and 1000 Hz are messy, with plenty of periodic and frequent outliers. Onto the wireless testing.
For wired mice, polling rate stability merely concerns the wired connection between the mouse (SPI communication) and the USB. For wireless mice, another device that needs to be kept in sync between the first two is added to the mix: the wireless dongle/wireless receiver. I'm unable to measure all stages of the entire end-to-end signal chain individually, so testing polling-rate stability at the endpoint (the USB) has to suffice here.
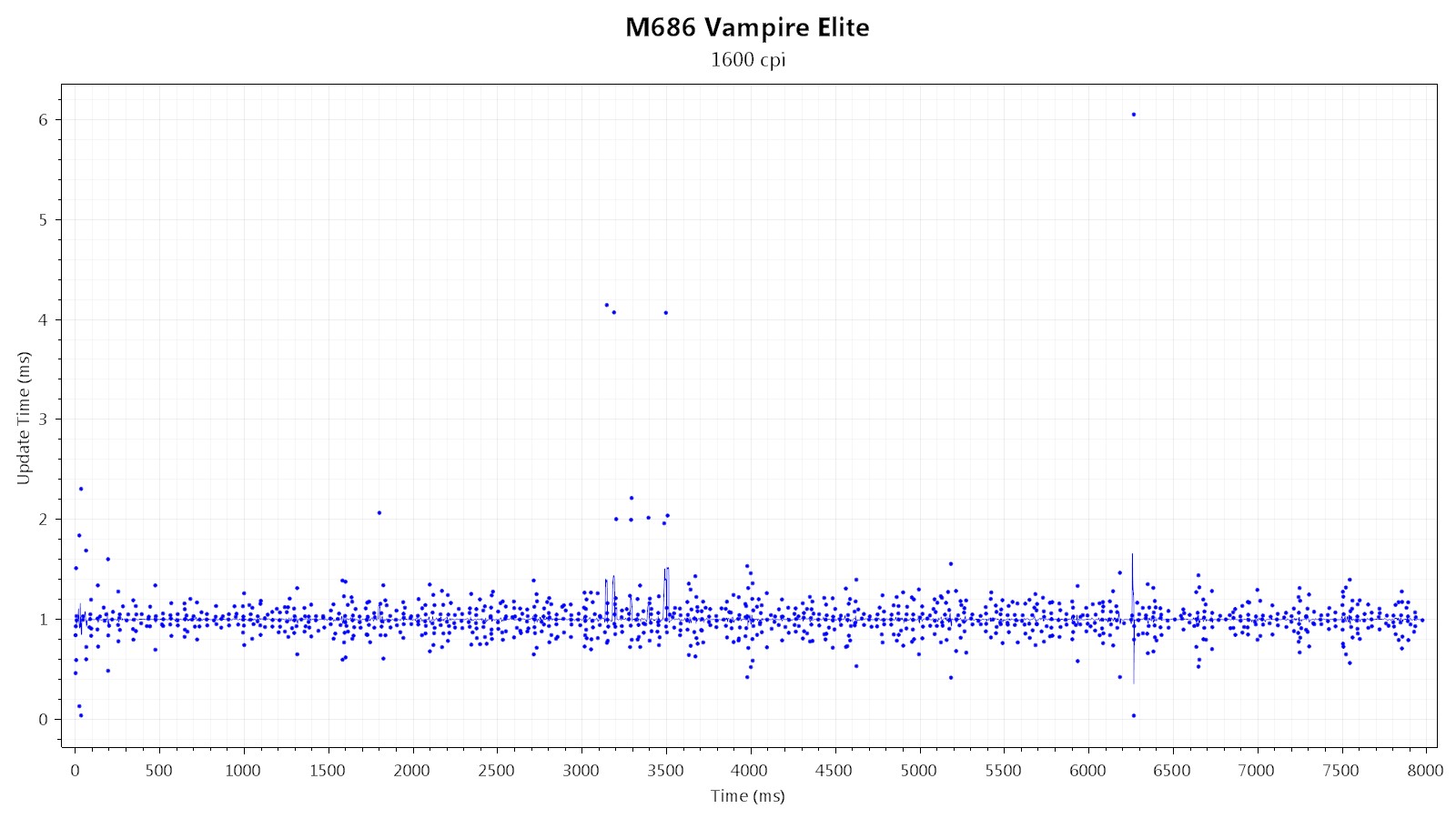
First, I'm testing whether SPI, wireless, and USB communication are synchronized. Any of these being out of sync would be indicated by at least one 2 ms report, which would be the result of any desynchronization drift accumulated over time. As you can see, several 2 ms reports are visible (along with 4 and 6 ms reports), which confirms that the polling of the entire signal chain is not in sync.
Second, I'm testing the general polling-rate stability of the individual polling rates in wireless mode. Running the M686 Vampire Elite at a lower polling rate can have the benefit of extending battery life. 125 Hz is the only setting that looks normal. 250 Hz already looks messy, and 500 Hz adds periodic outliers to this yet again. 1000 Hz lacks the weird count distribution seen at 250 and 500 Hz, but has even more severe outliers than 500 Hz. Overall, a remarkably poor result.
Paint Test

This test is used to indicate any potential issues with angle snapping (non-native straightening of linear motion) and jitter, along with any sensor lens rattle. As you can see, no issues with angle snapping can be observed. No jitter is visible at 1600 CPI, but 3200 CPI already shows some jitter. At 16,000 CPI, jitter is high but not excessive. Lastly, there is no sensor lens rattle.
Lift-off Distance
The M686 Vampire Elite does not support adjusting LOD. This is unfortunate as the 3335 would be fully capable of it. At the only available (default) setting, LOD is low since the sensor does not track at a height of 1 DVD (<0.8 mm). Keep in mind that LOD may vary slightly depending on the mousing surface (pad) it is being used on.Click Latency

Since mechanical switches are being used for the buttons in most computer mice, debouncing is required in order to avoid unintended double clicks. Debouncing typically adds a delay (along with any potential processing delay), which shall be referred to as click latency. As there is no way to measure said delay directly, it has to be done by comparing it to a control subject, which in this case is the Logitech G203. Click latency has been measured to be roughly +13.1 ms compared to the SteelSeries Ikari, which is considered as the baseline with 0 ms. Please keep in mind that the measured value is not the absolute click latency. Comparison data comes from this thread as well as my own testing, using qsxcv's program.
Mar 10th, 2025 19:13 EDT
change timezone
Latest GPU Drivers
New Forum Posts
- I'm looking for a good tool to make the 3D scanning of my mini-pc using the photogrammetry and my Kinect 2. (54)
- Post Your TIMESPY, PCMARK10 & FIRESTRIKE SCORES! (2019) (271)
- AMD RX 7000 series GPU Owners' Club (1307)
- I need a BIOS for the "Rx580 8gb" chip 215-0876406 (6)
- Biostar RX 6700 XT OC BIOS (7)
- Nvidia's GPU market share hits 90% in Q4 2024 (gets closer to full monopoly) (774)
- What's your latest tech purchase? (23278)
- Wherein lies the difference (2)
- USB hard disk box capacity limits (14)
- RX 9000 series GPU Owners Club (41)
Popular Reviews
- Sapphire Radeon RX 9070 XT Nitro+ Review - Beating NVIDIA
- XFX Radeon RX 9070 XT Mercury OC Magnetic Air Review
- ASUS Radeon RX 9070 TUF OC Review
- MSI MAG B850 Tomahawk Max Wi-Fi Review
- NVIDIA GeForce RTX 5080 Founders Edition Review
- NVIDIA GeForce RTX 5070 Founders Edition Review
- Corsair Vengeance RGB CUDIMM DDR5-8800 48 GB CL42 Review
- AMD Ryzen 7 9800X3D Review - The Best Gaming Processor
- ASUS GeForce RTX 5070 Ti TUF OC Review
- MSI GeForce RTX 5070 Ti Gaming Trio OC+ Review
Controversial News Posts
- NVIDIA GeForce RTX 50 Cards Spotted with Missing ROPs, NVIDIA Confirms the Issue, Multiple Vendors Affected (513)
- AMD Plans Aggressive Price Competition with Radeon RX 9000 Series (277)
- AMD Radeon RX 9070 and 9070 XT Listed On Amazon - One Buyer Snags a Unit (261)
- AMD RDNA 4 and Radeon RX 9070 Series Unveiled: $549 & $599 (260)
- AMD Mentions Sub-$700 Pricing for Radeon RX 9070 GPU Series, Looks Like NV Minus $50 Again (248)
- NVIDIA Investigates GeForce RTX 50 Series "Blackwell" Black Screen and BSOD Issues (244)
- AMD Radeon RX 9070 and 9070 XT Official Performance Metrics Leaked, +42% 4K Performance Over Radeon RX 7900 GRE (195)
- AMD Radeon RX 9070-series Pricing Leaks Courtesy of MicroCenter (158)