 4
4
Incott GHERO Pro Review
Testing 8000 Hz Wireless »Sensor and Performance
The Incott GHERO Pro is equipped with the PixArt PAW3395. According to specifications, the 3395 is capable of up to 26,000 CPI, as well as a maximum tracking speed of 650 IPS, which equals 16.51 m/s. Out of the box, six pre-defined CPI steps are available: 400, 800, 1600, 2400, 3200, and 6400.All testing was done on the latest firmware. As such, results obtained on earlier firmware versions may differ from those presented hereafter.
CPI Accuracy

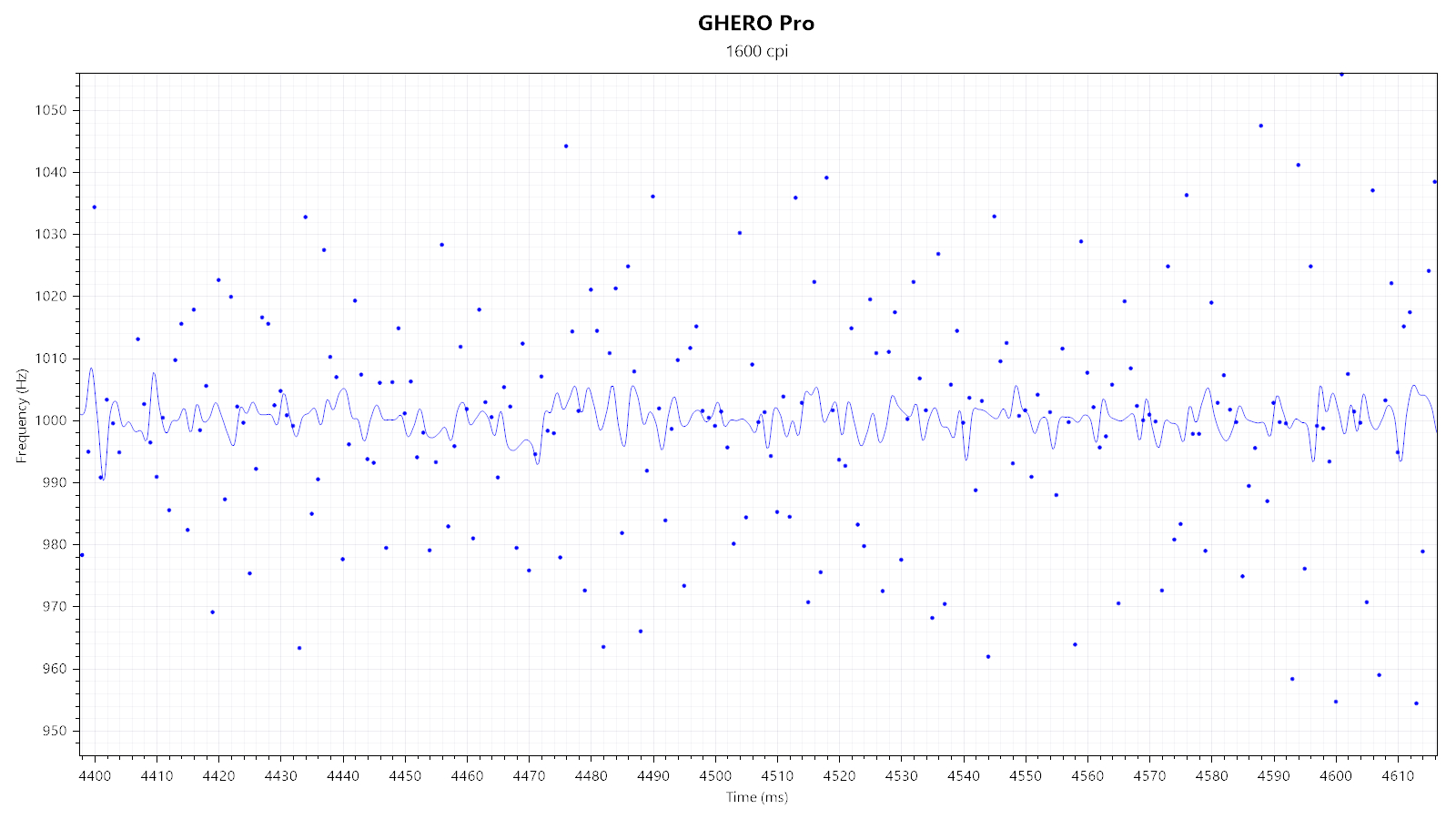
I've restricted my testing to the four most common CPI steps, which are 400, 800, 1600, and 3200. As you can see, deviation is consistently positive and high, which is an average result overall. In order to account for the measured deviation, adjusted steps of 400, 750, 1500, and 3050 CPI have been used for testing.
Motion Delay
Wired testing
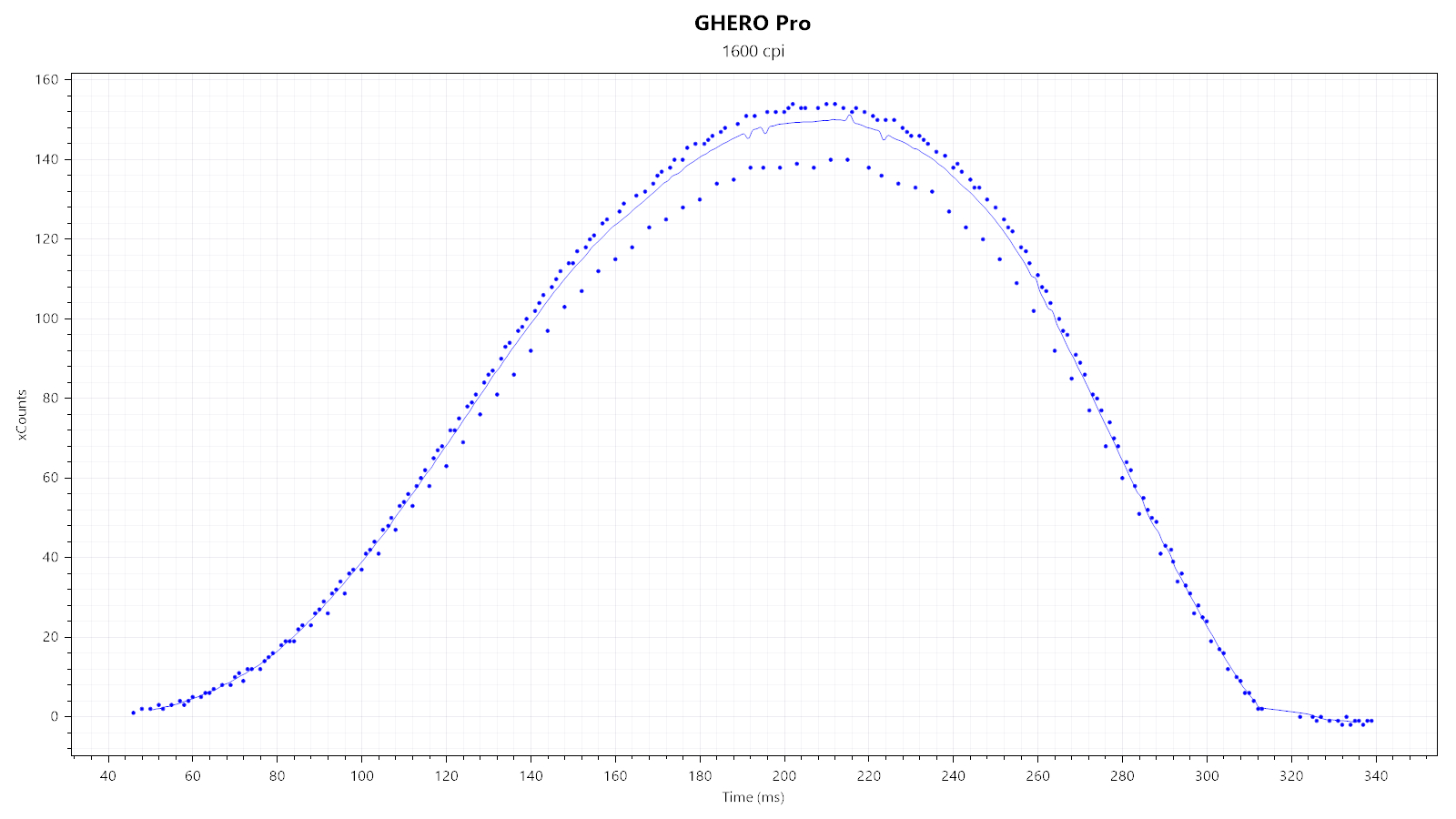
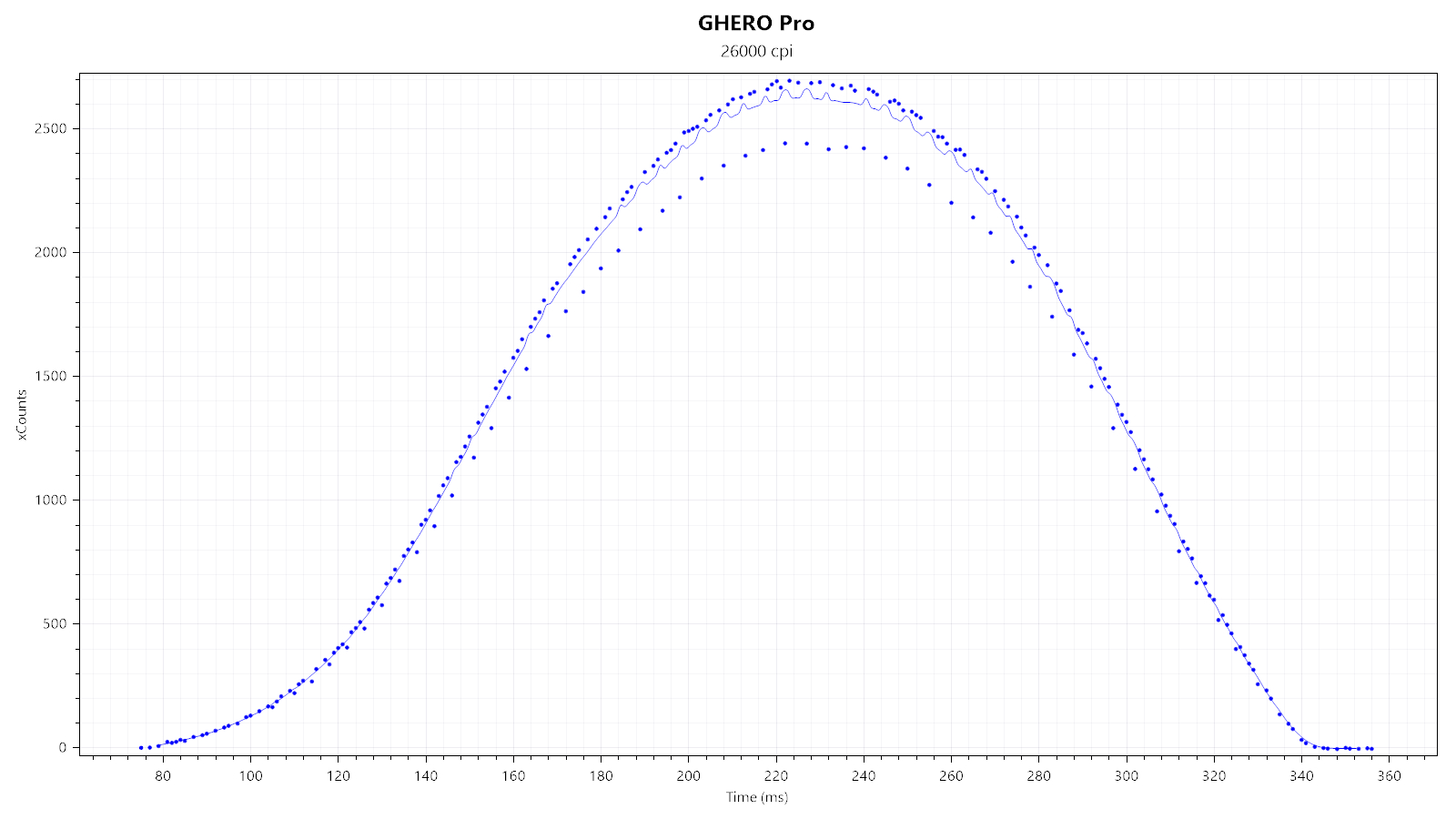
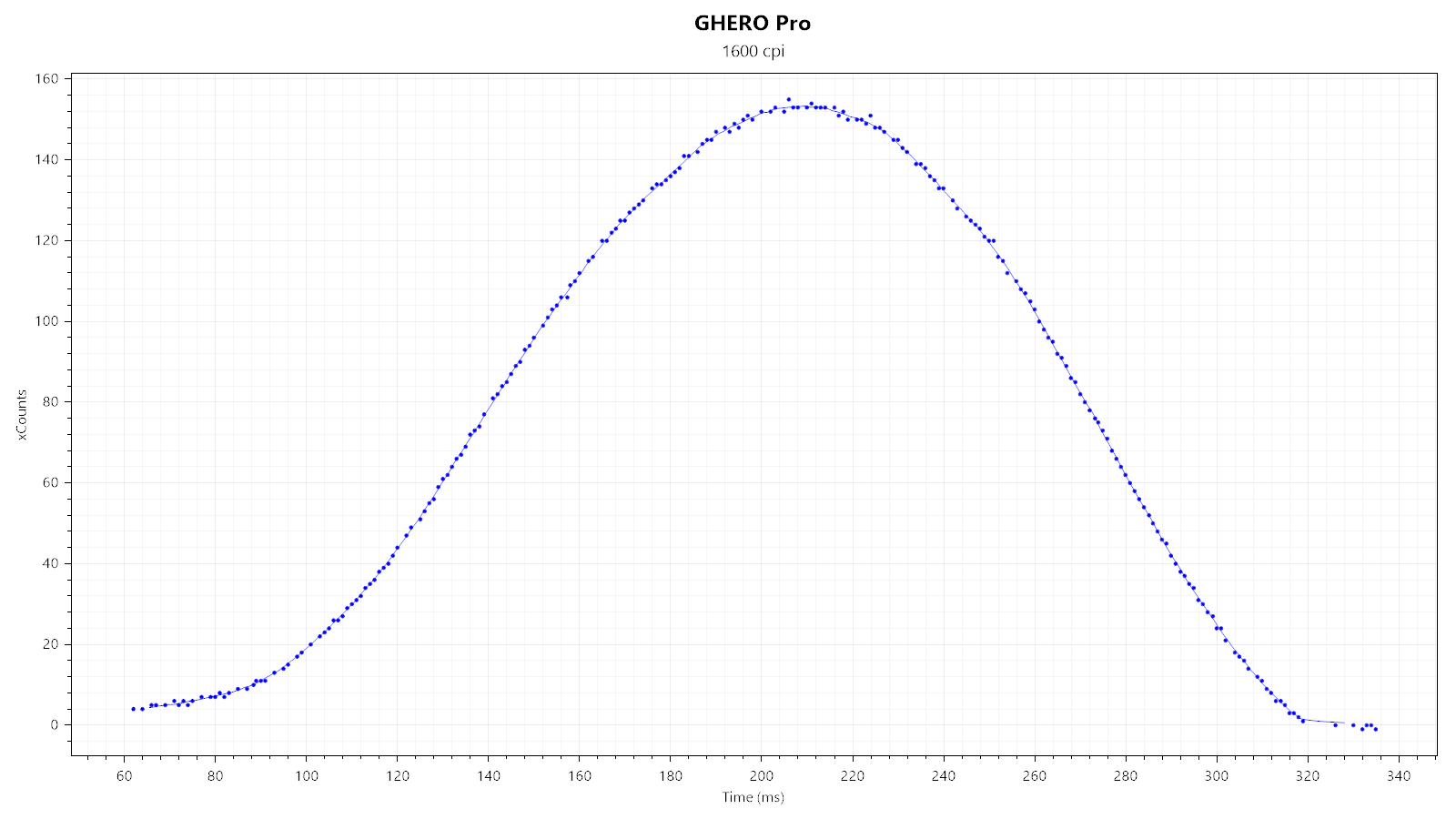
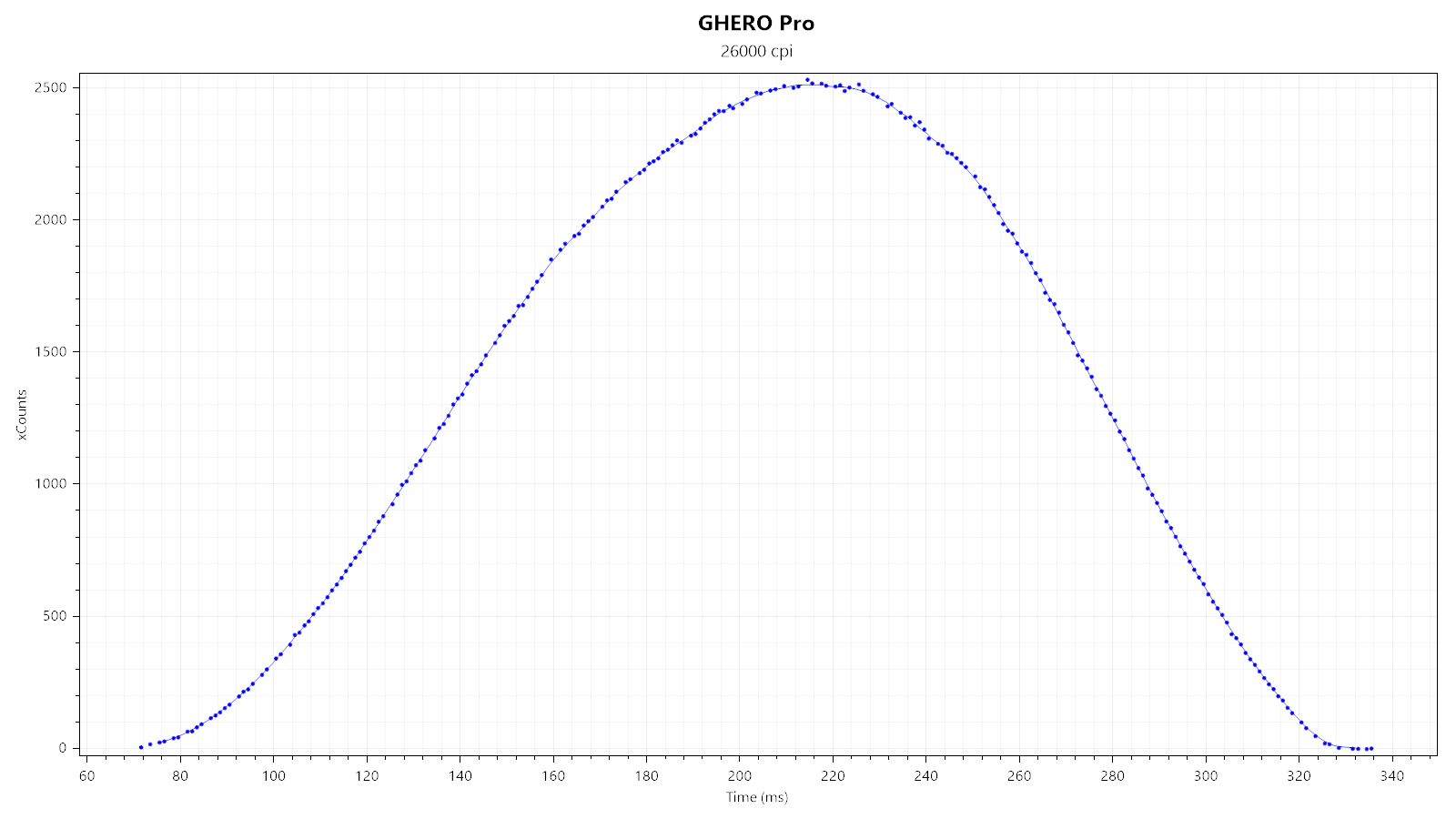
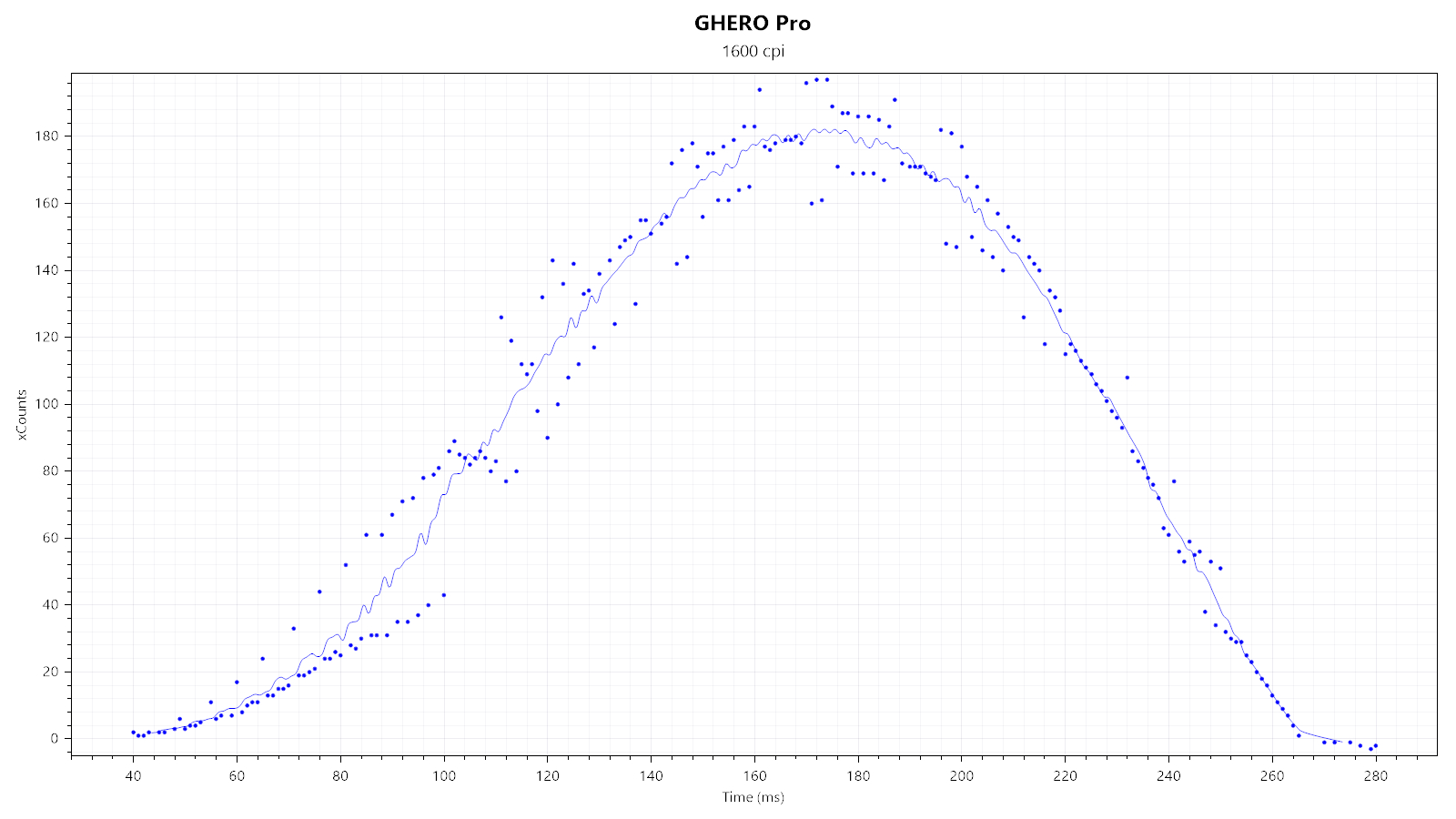
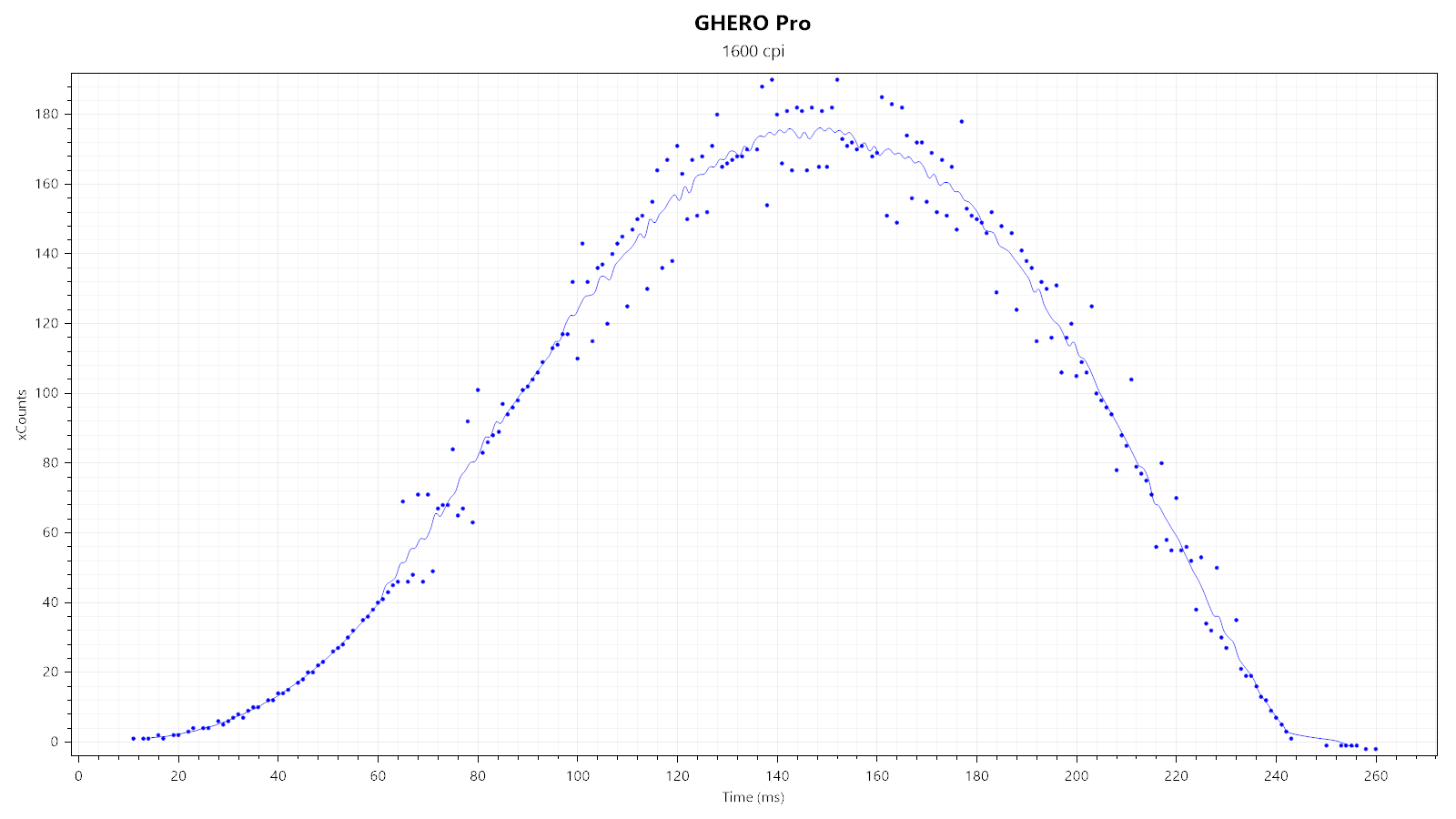
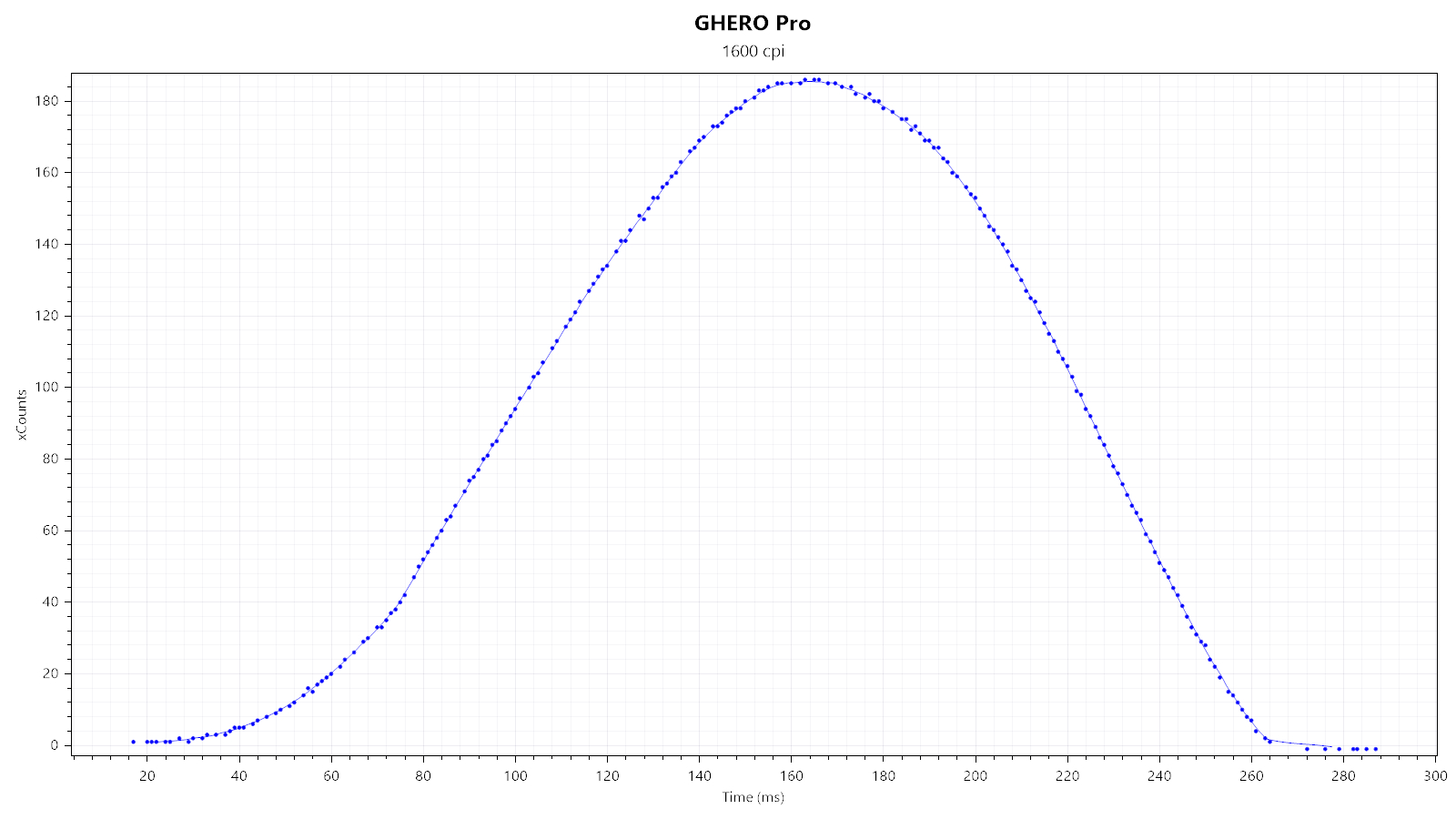
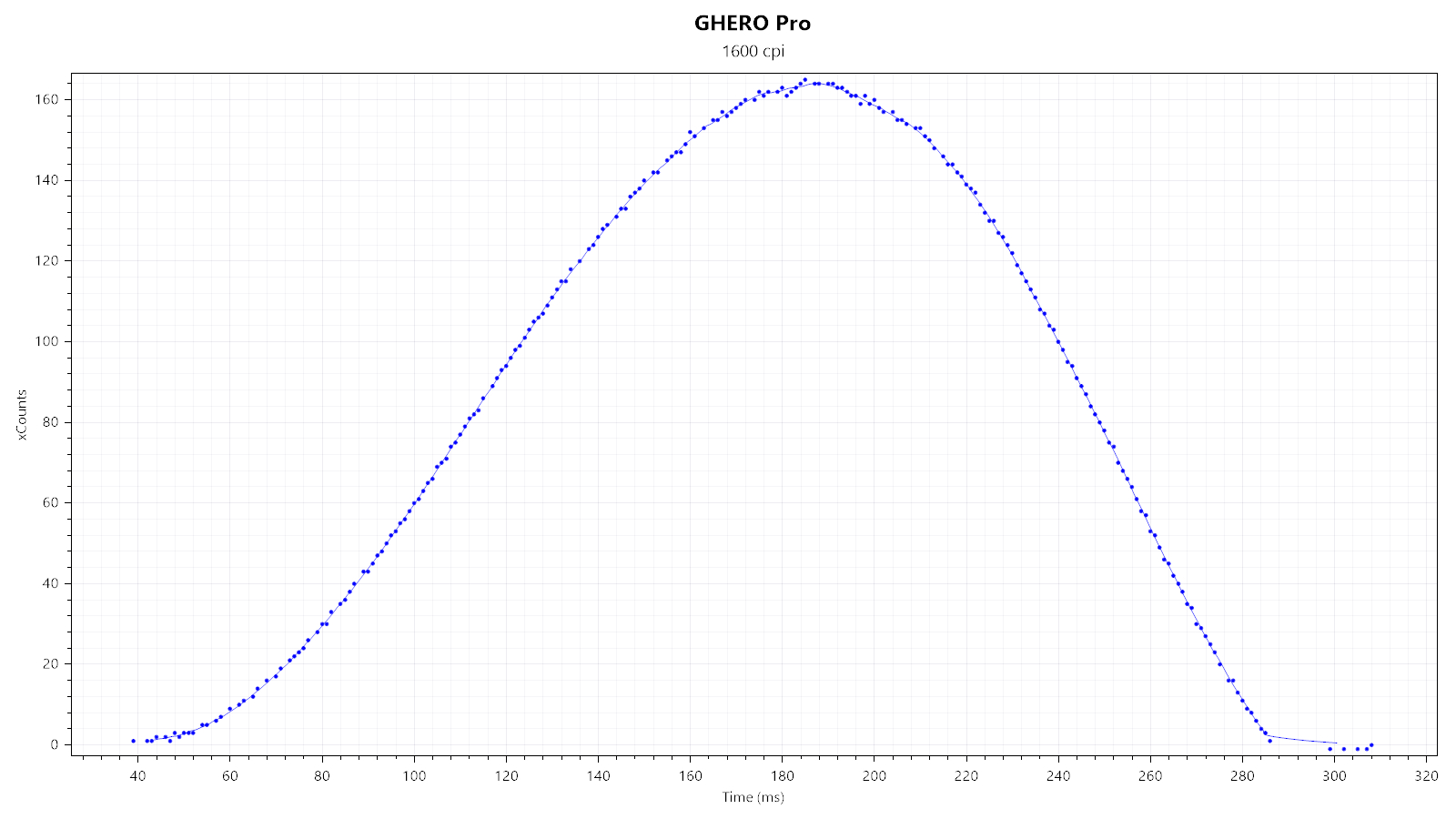
First, I'm looking at two xCounts plots—generated at 1600 and 26,000 CPI—to quickly gauge whether there is any smoothing, which would be indicated by any visible "kinks." Neither plot shows any kinks, strongly suggesting there not being any smoothing across the entire CPI range.
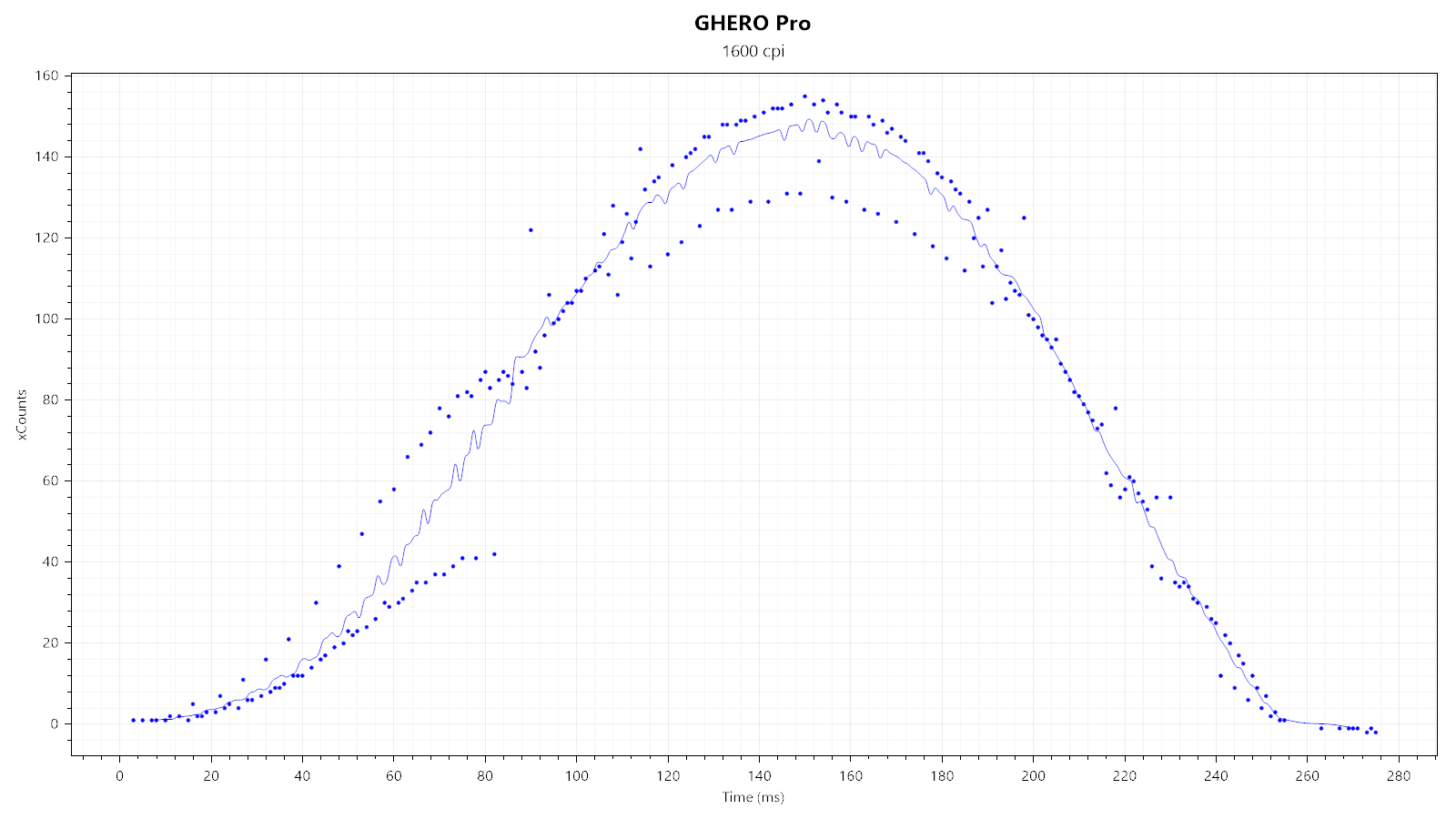
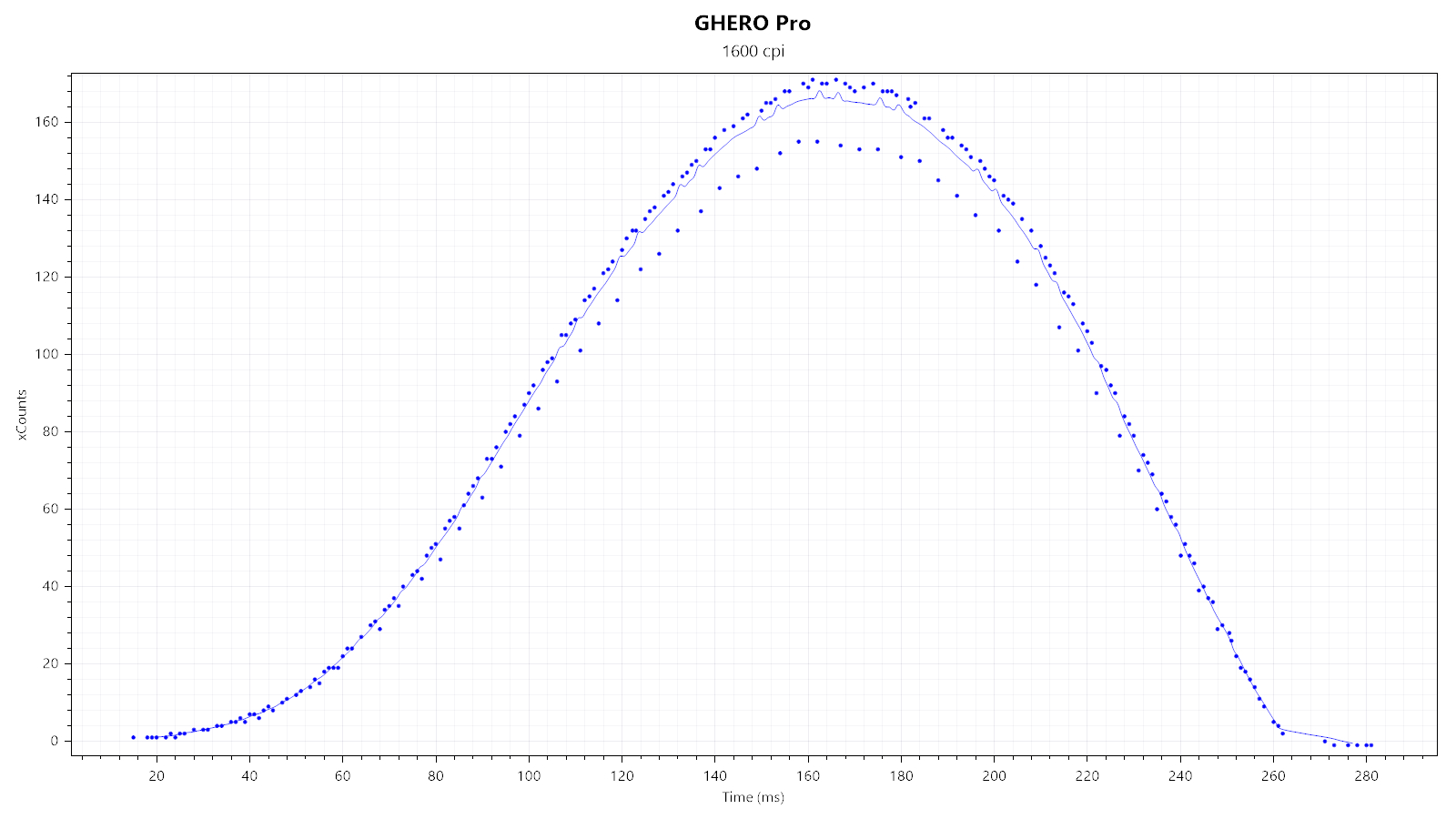
Interestingly, the GHERO Pro allows modifying sensor run mode not only in wireless mode, but in wired mode as well. LP (low power, first plot) and HP (high performance, second plot) show higher SPI timing jitter compared to corded mode.
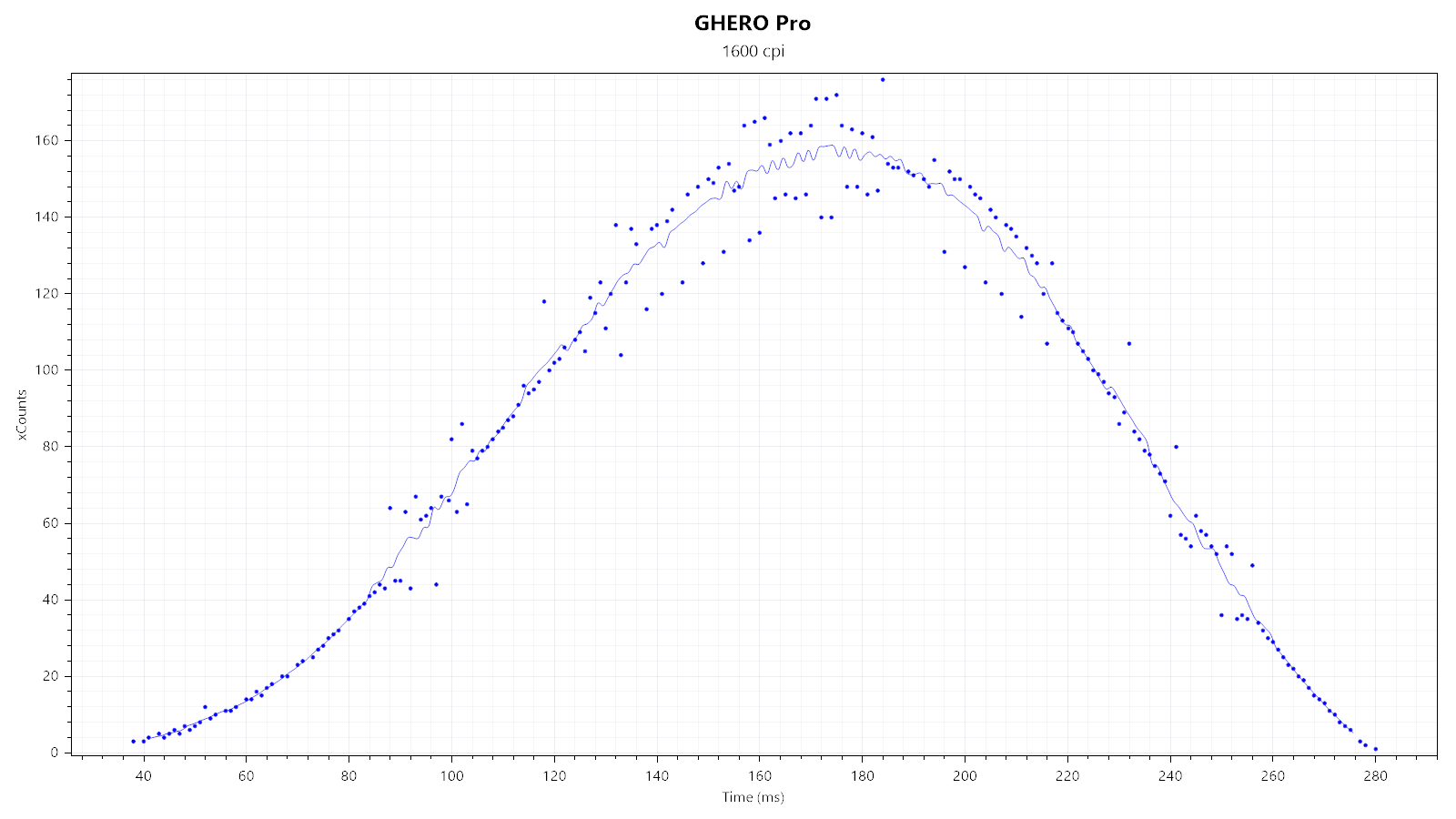
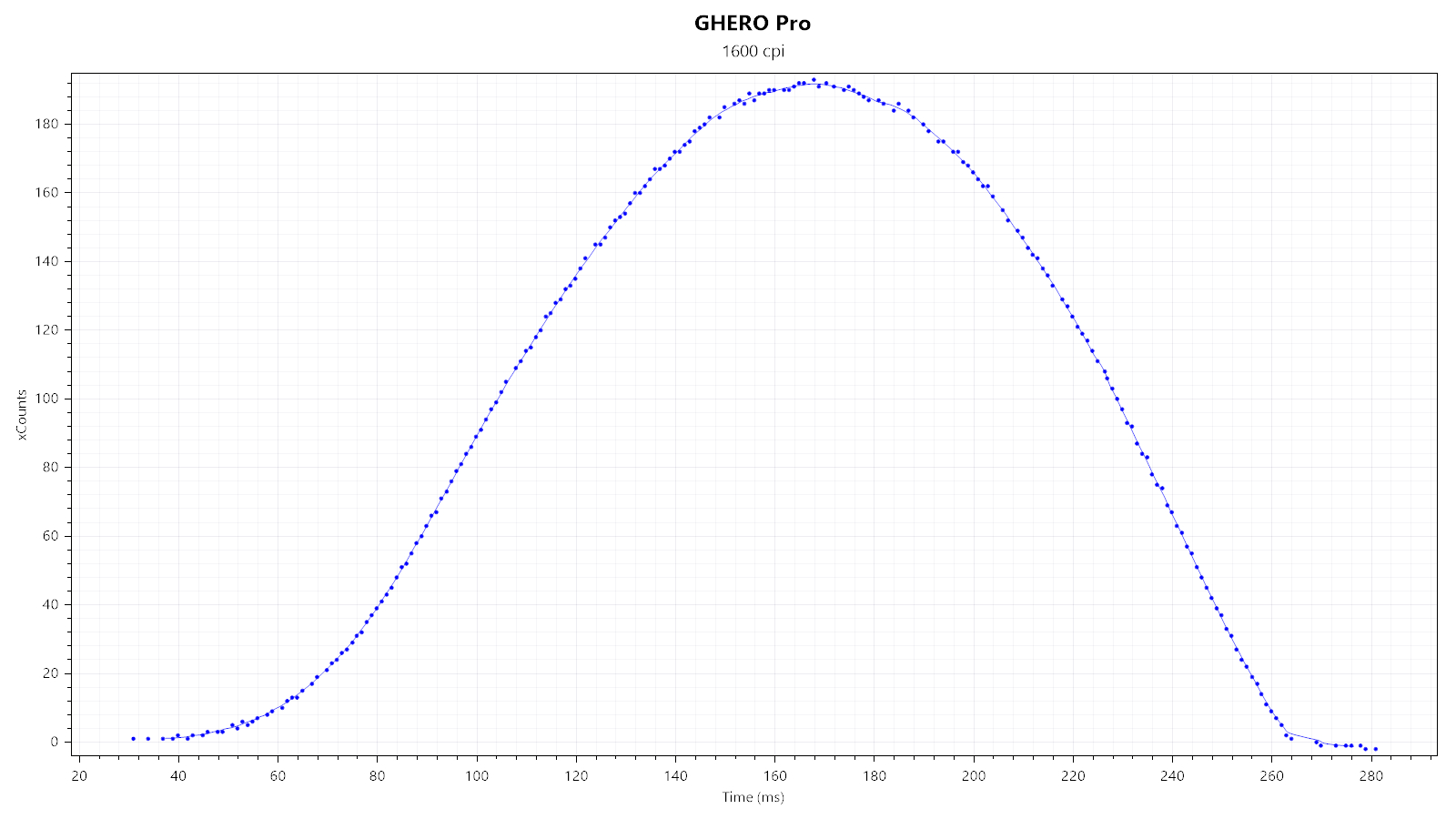
The GHERO Pro also allows enabling MotionSync, which effectively synchronizes SPI reads with USB polls, resulting in low SPI timing jitter as seen above.
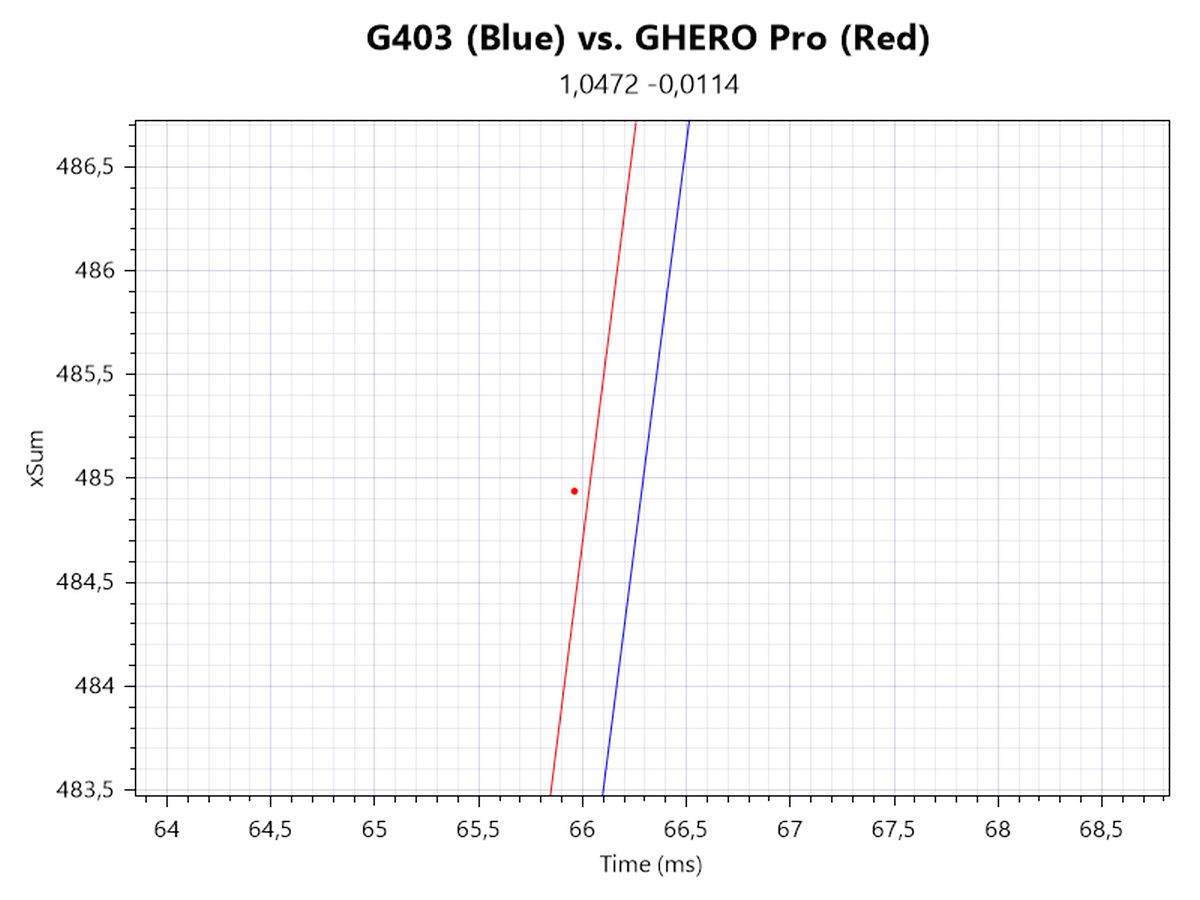
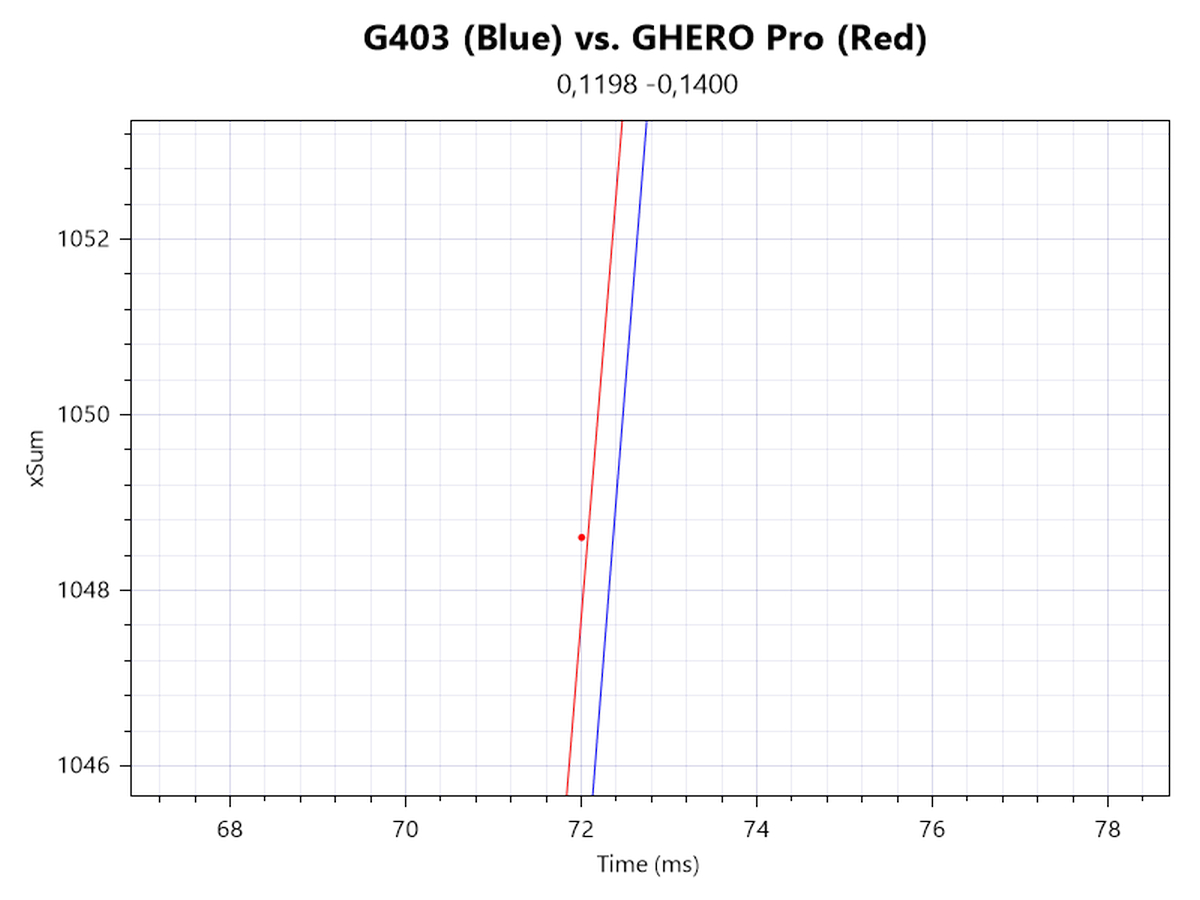
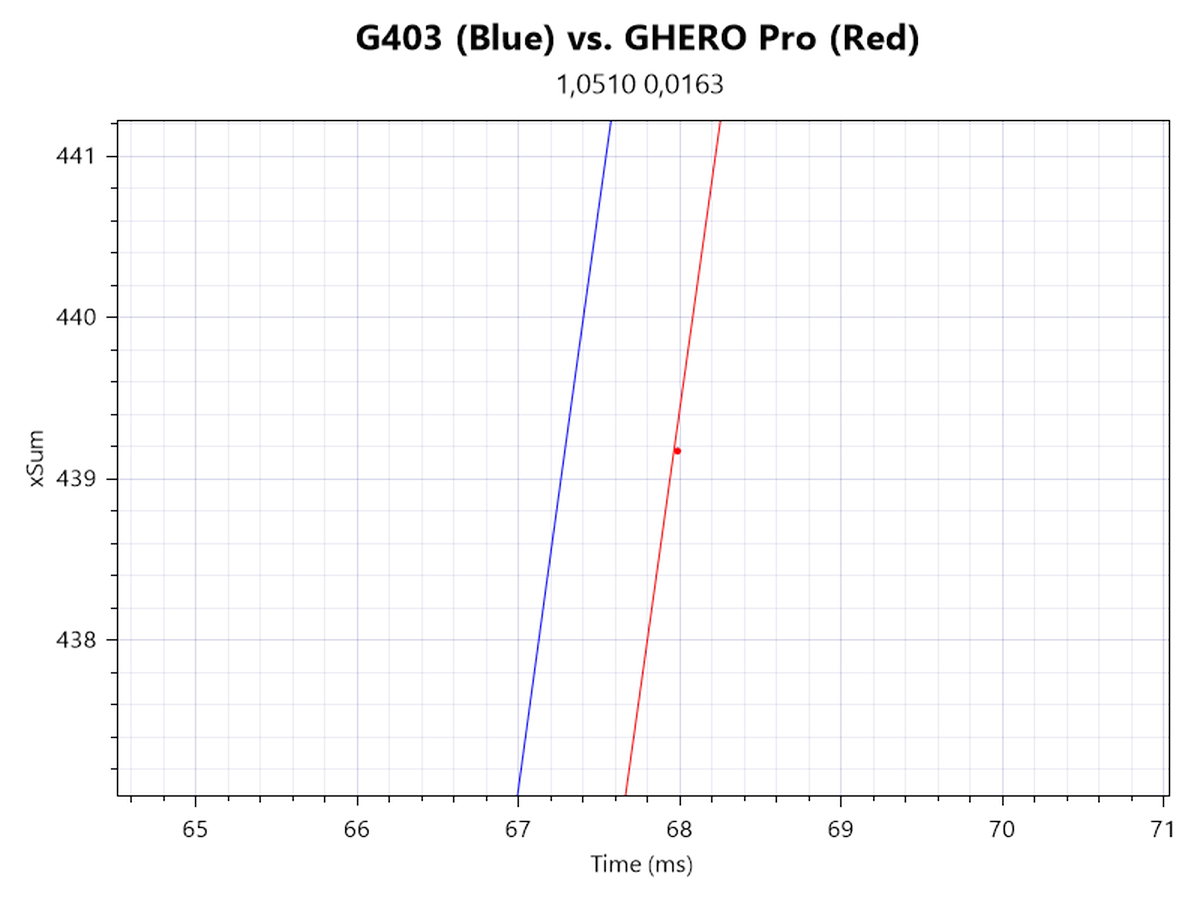
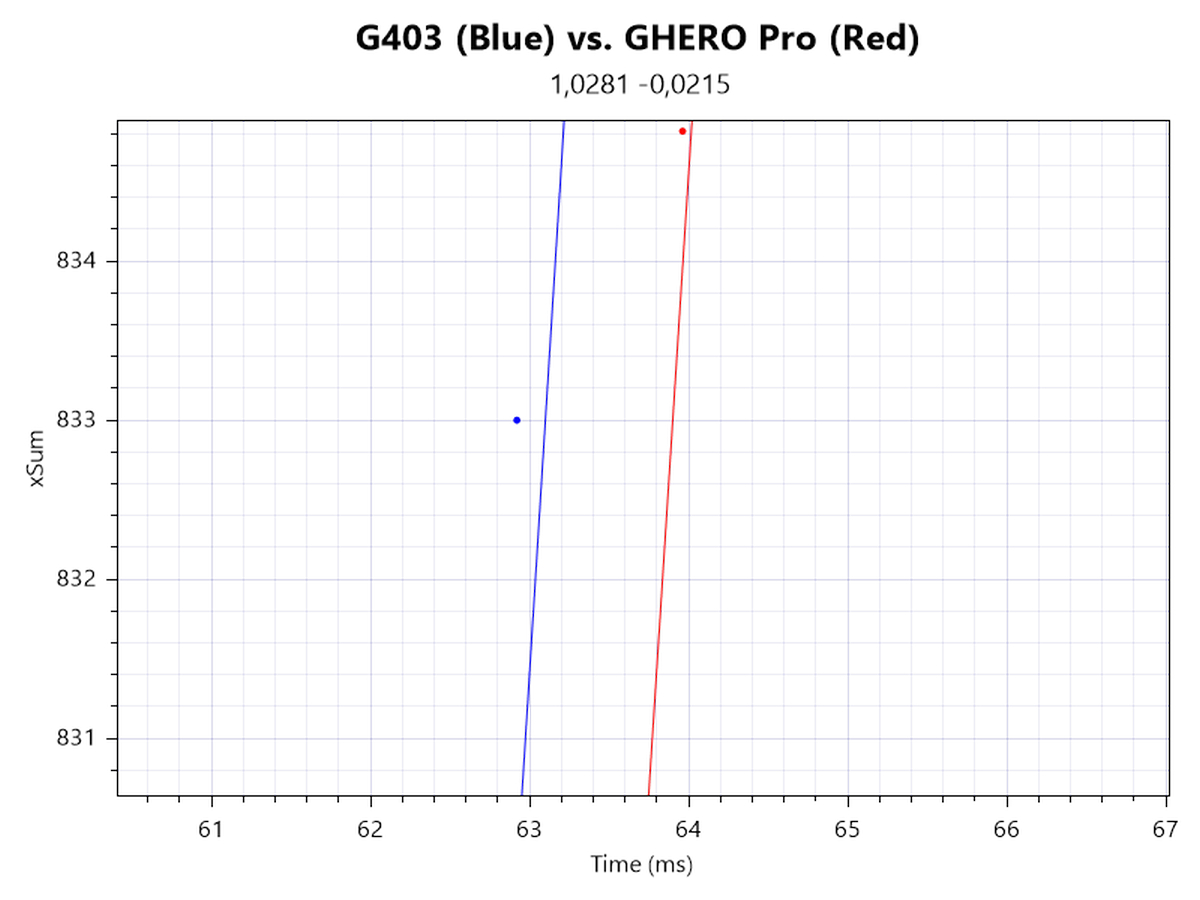
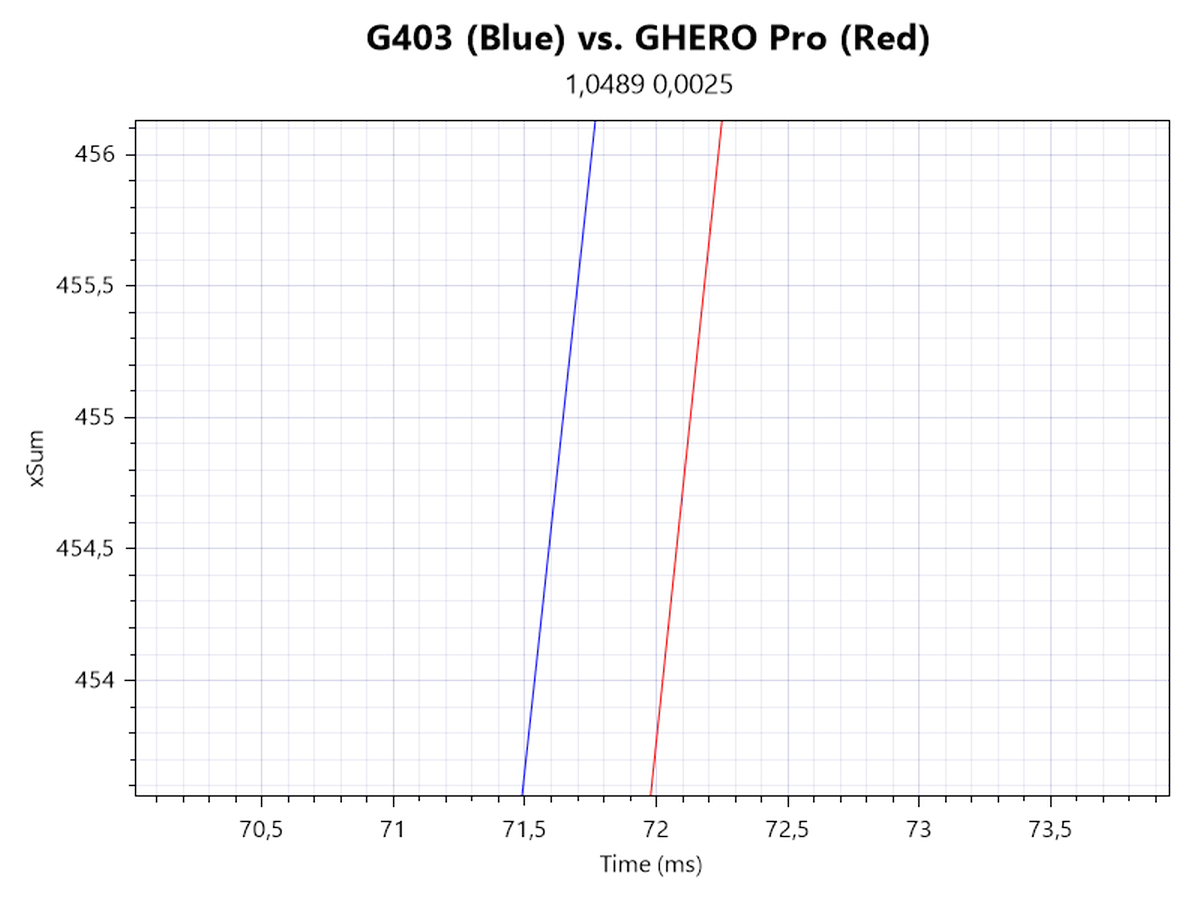
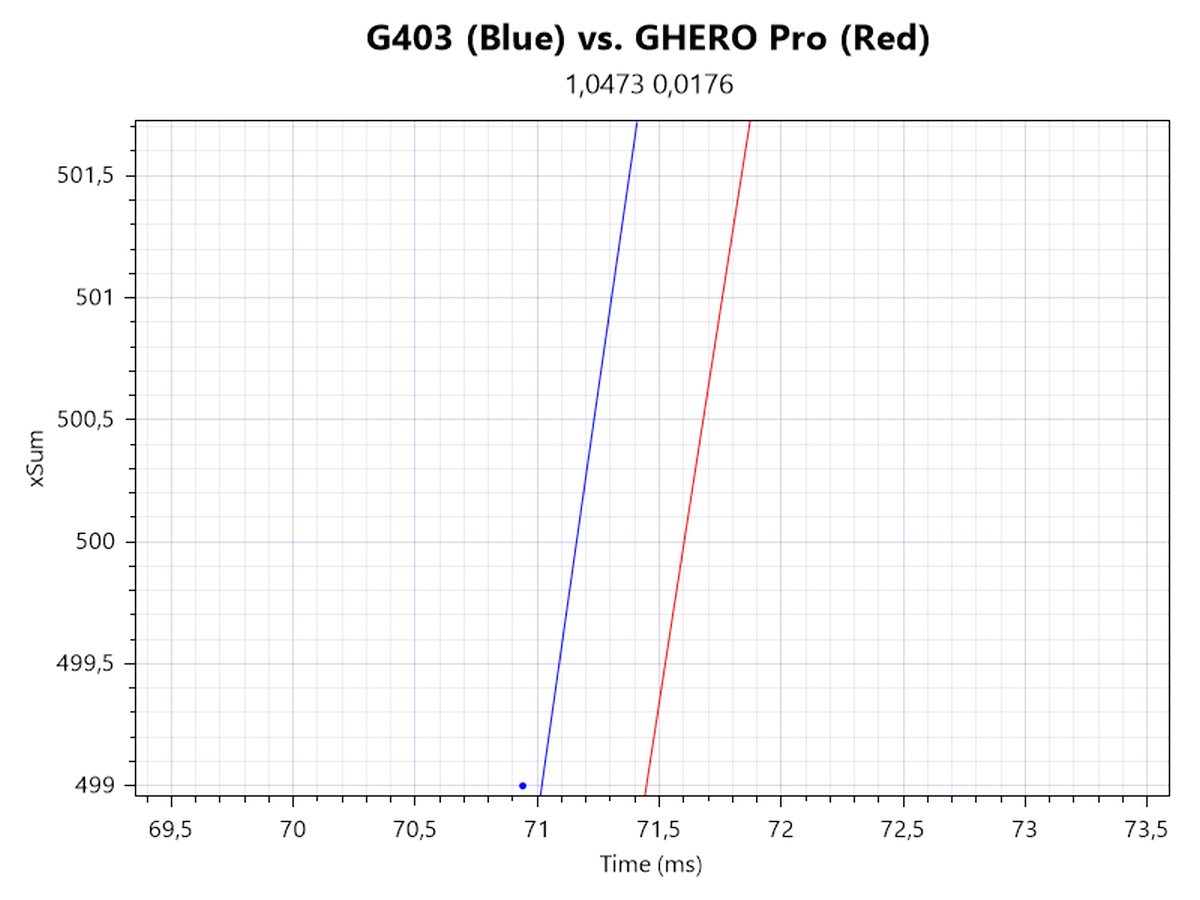
In order to determine motion delay, I'm looking at xSum plots generated at 1600 and 26,000 CPI, both without (first row) and with (second row) MotionSync. The line further to the left denotes the sensor with less motion delay. Without MotionSync, there is no motion delay differential at both 1600 and 26,000 CPI, further confirming there not being smoothing across the entire CPI range. With MotionSync, a bit more than 0.5 ms of motion delay is added.
Wireless testing
Much like in wired mode, the sensor run mode can be modified in wireless mode. LP mode (first plot) displays slightly higher SPI timing jitter than HP mode (second plot).
Upon enabling MotionSync, SPI timing is tightened to a similar degree in both instances.
In addition, corded mode is also available. Even without MotionSync (first plot), SPI timing jitter is notably lower compared to both LP and HP.
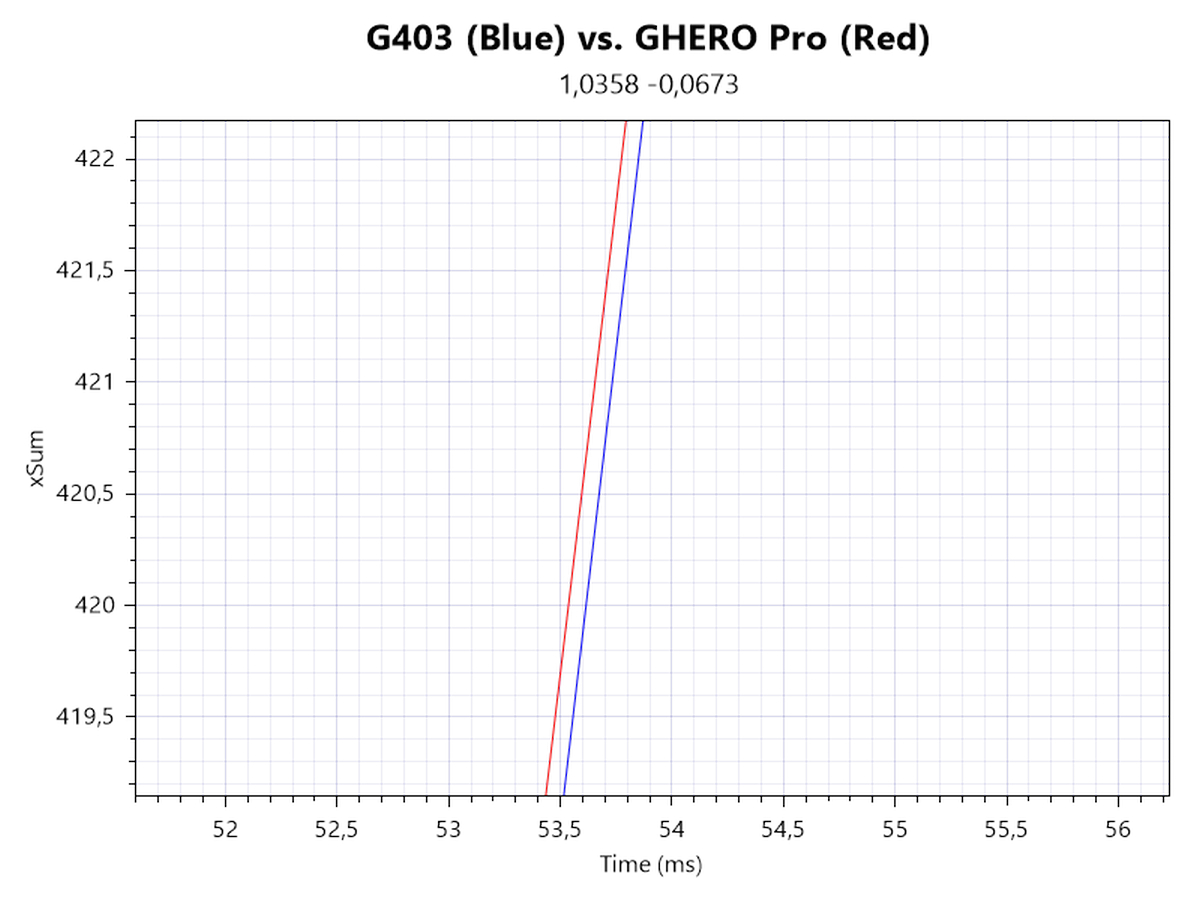
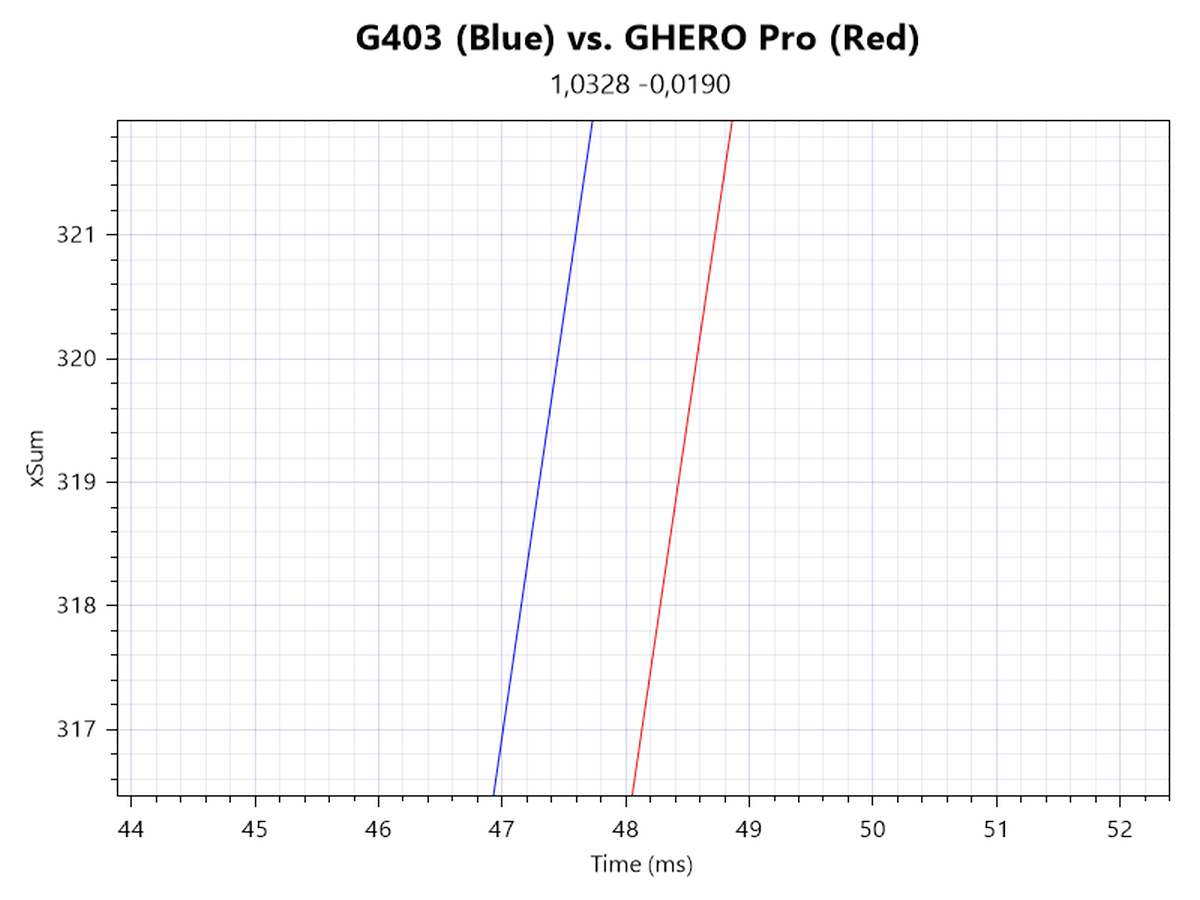
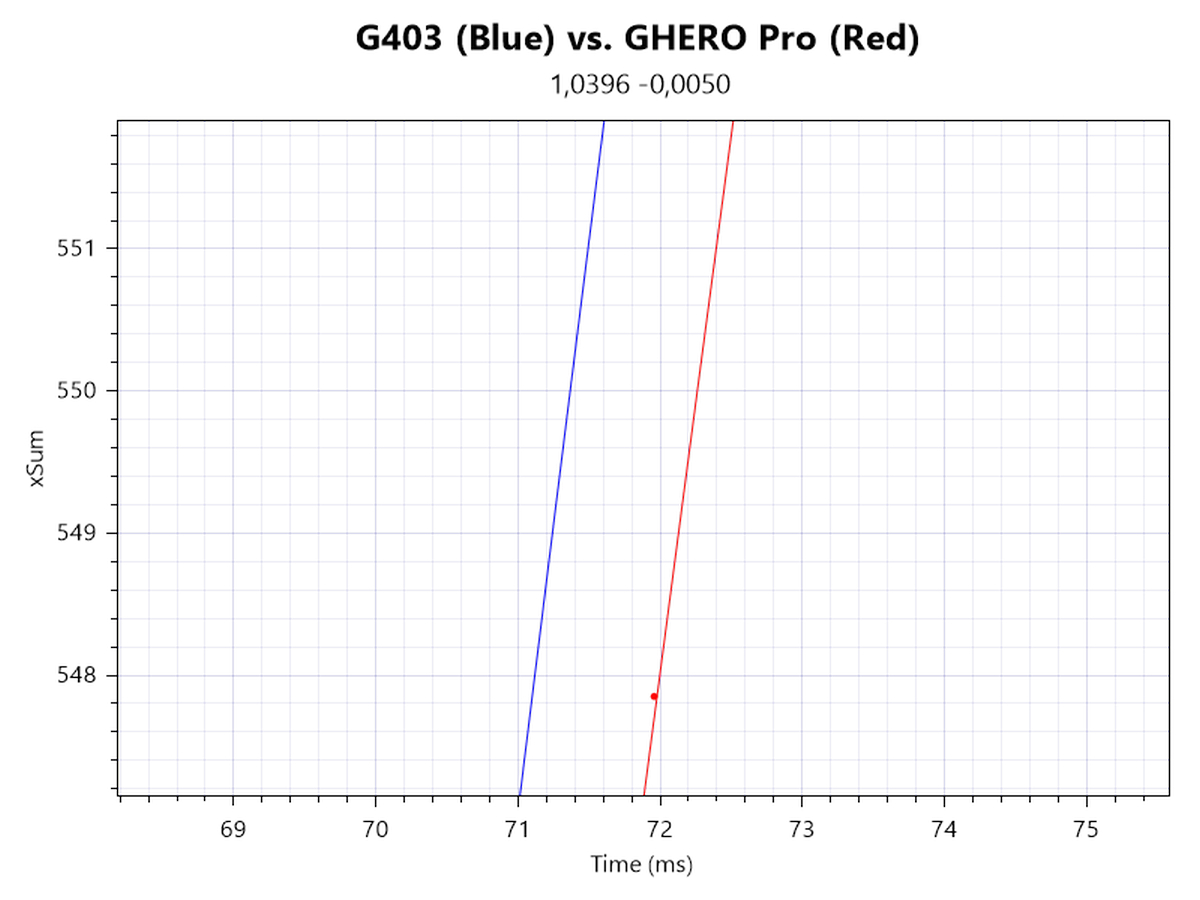
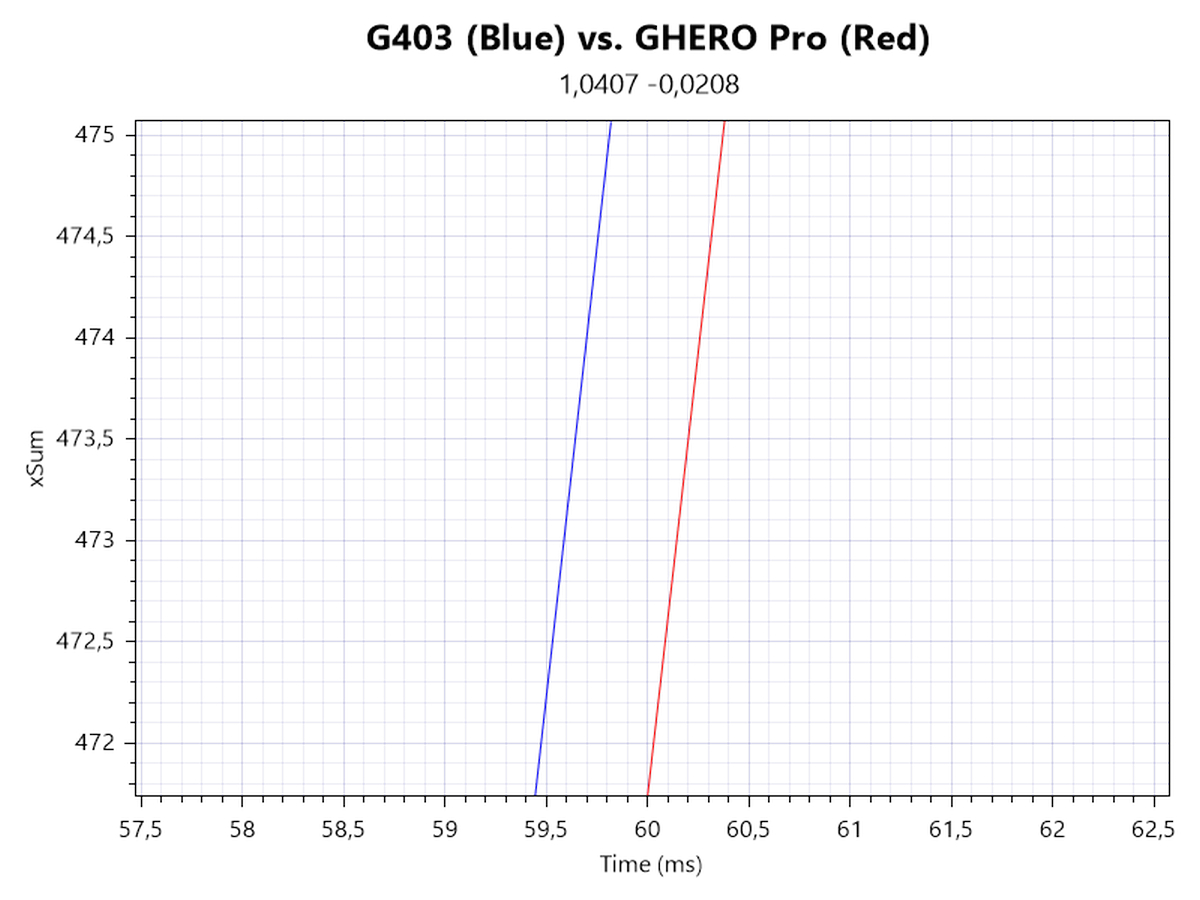
1600 CPI both without (first row) and with (second row) MotionSync is tested. Without MotionSync, a motion delay differential of roughly 0.5 ms can be measured at 1600 CPI, both in LP mode (first plot) and HP mode (second plot), whereas corded mode results in no motion delay differential. With MotionSync, a motion delay differential of a bit more than 0.5 ms is added once again.
Speed-related Accuracy Variance (SRAV)
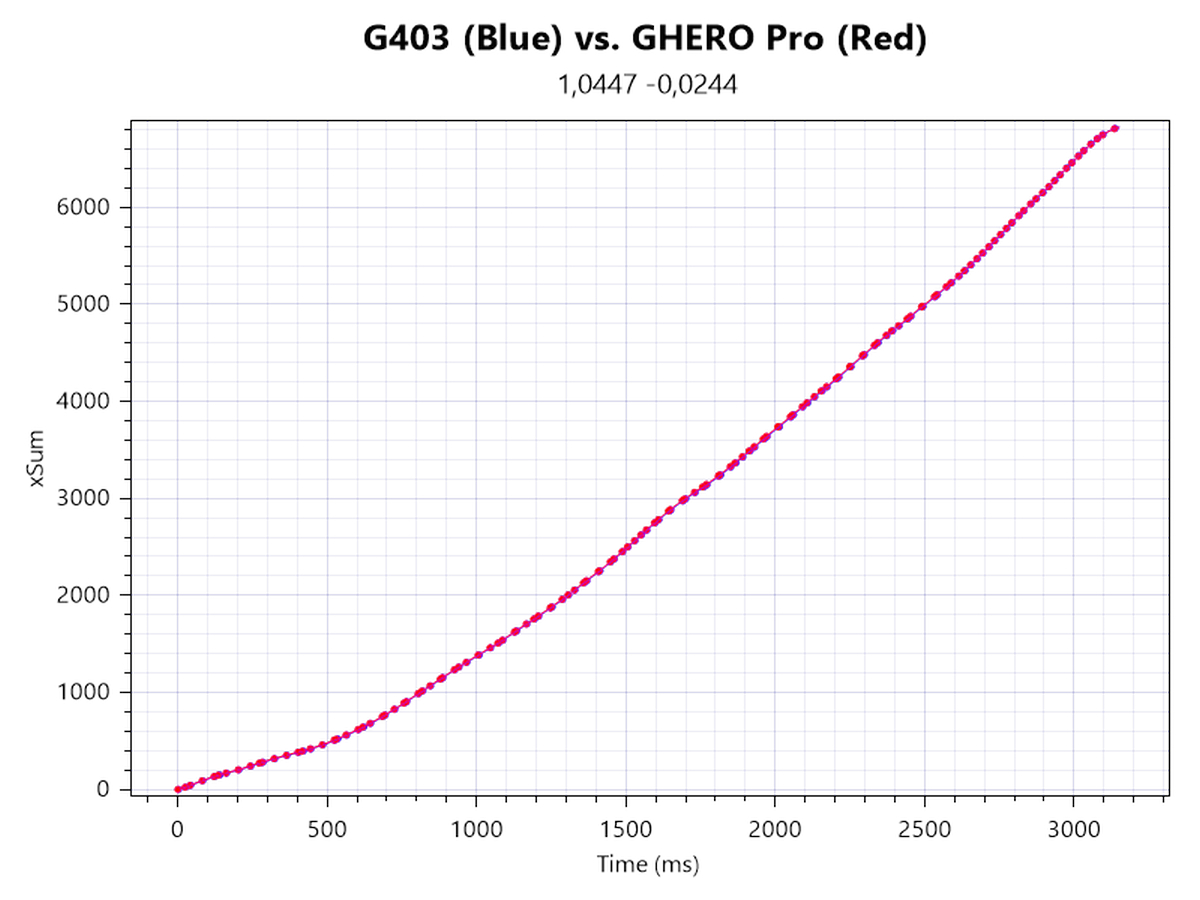
As you can see from the plot, no displacement between the two cursor paths can be observed, which confirms that SRAV is very low.
Perfect Control Speed
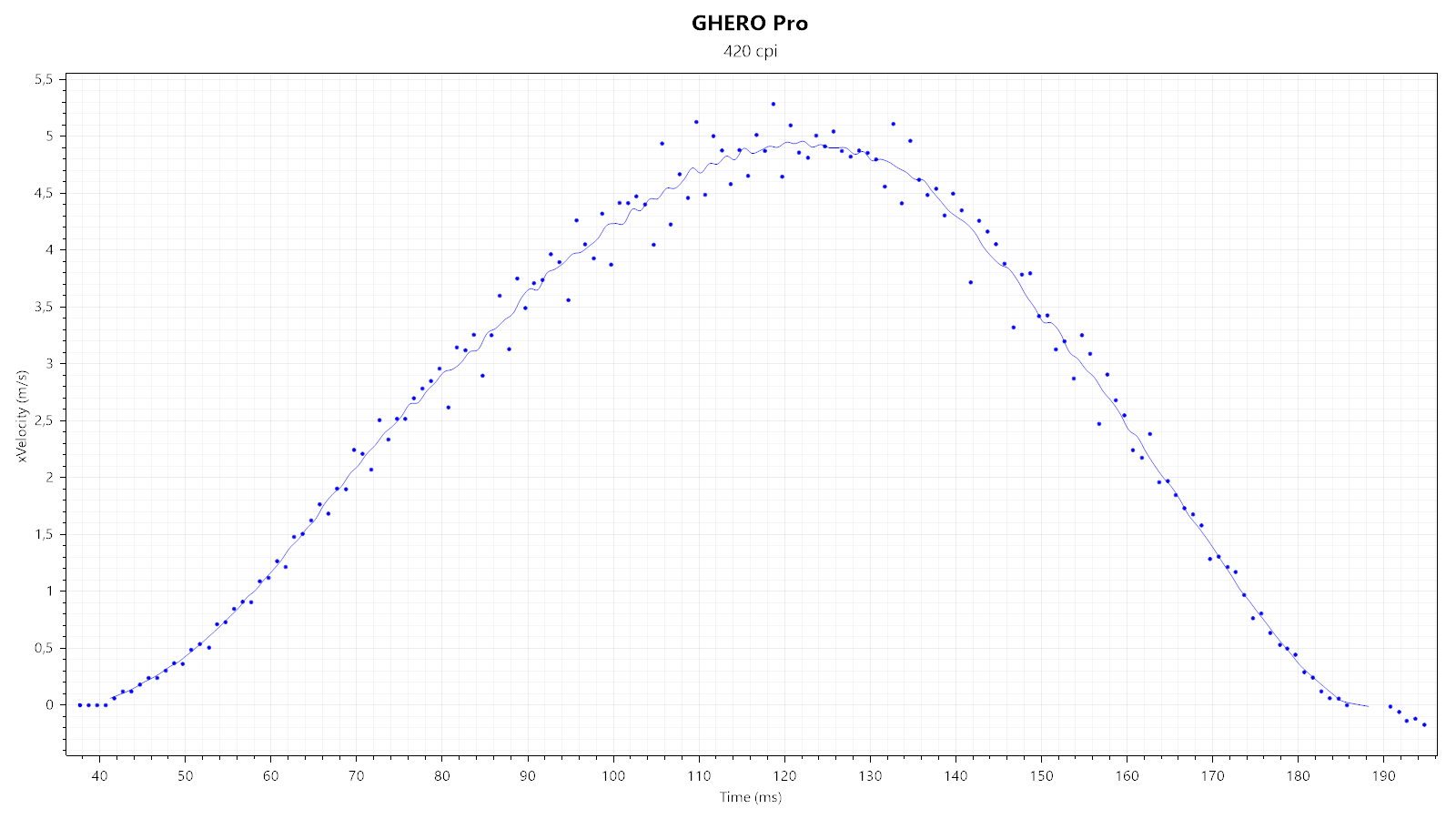
I've only managed to hit a measly 5 m/s, which is within the proclaimed PCS range and causes no observable sensor malfunction.
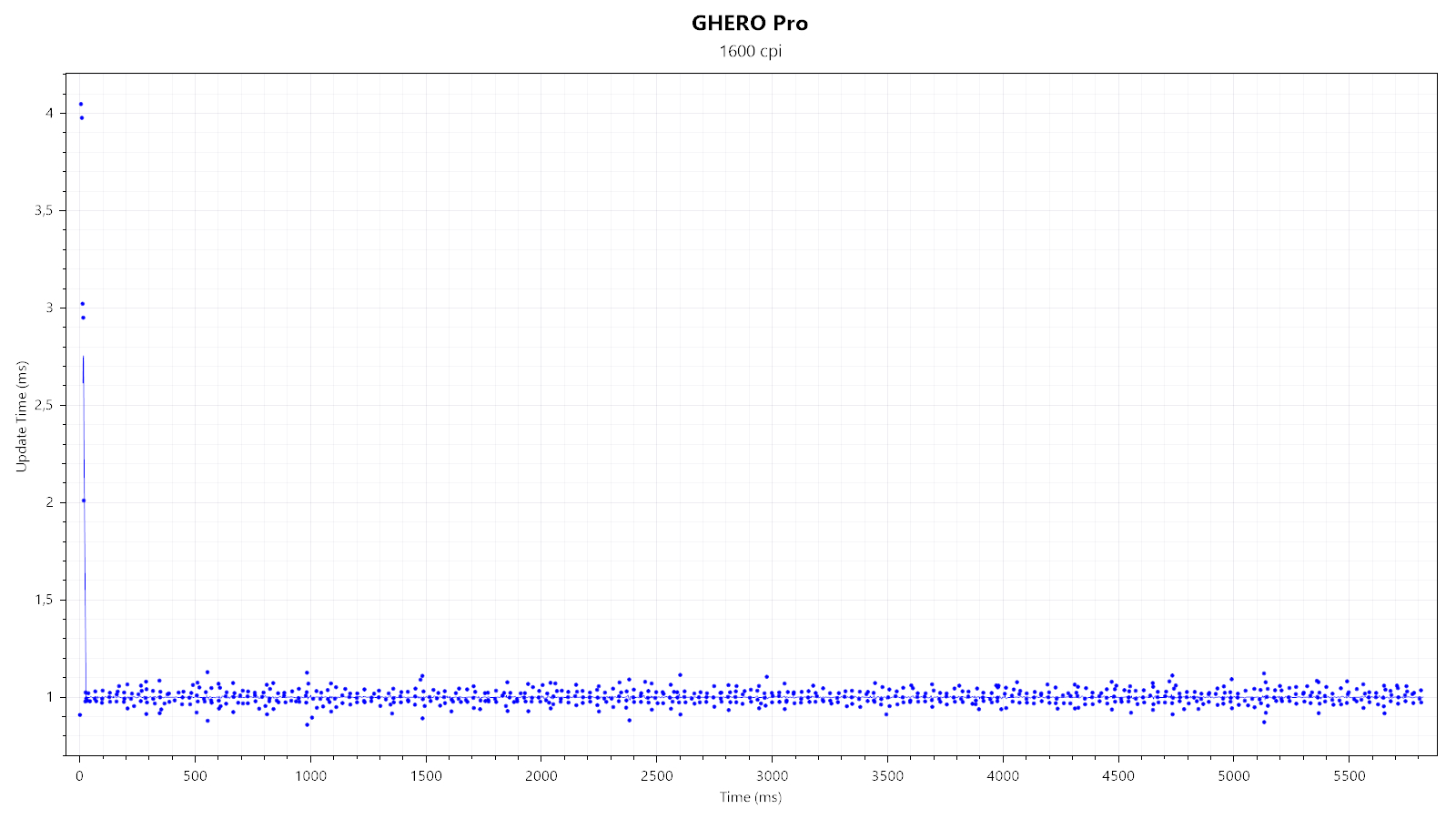
Polling Rate Stability
Wired testing
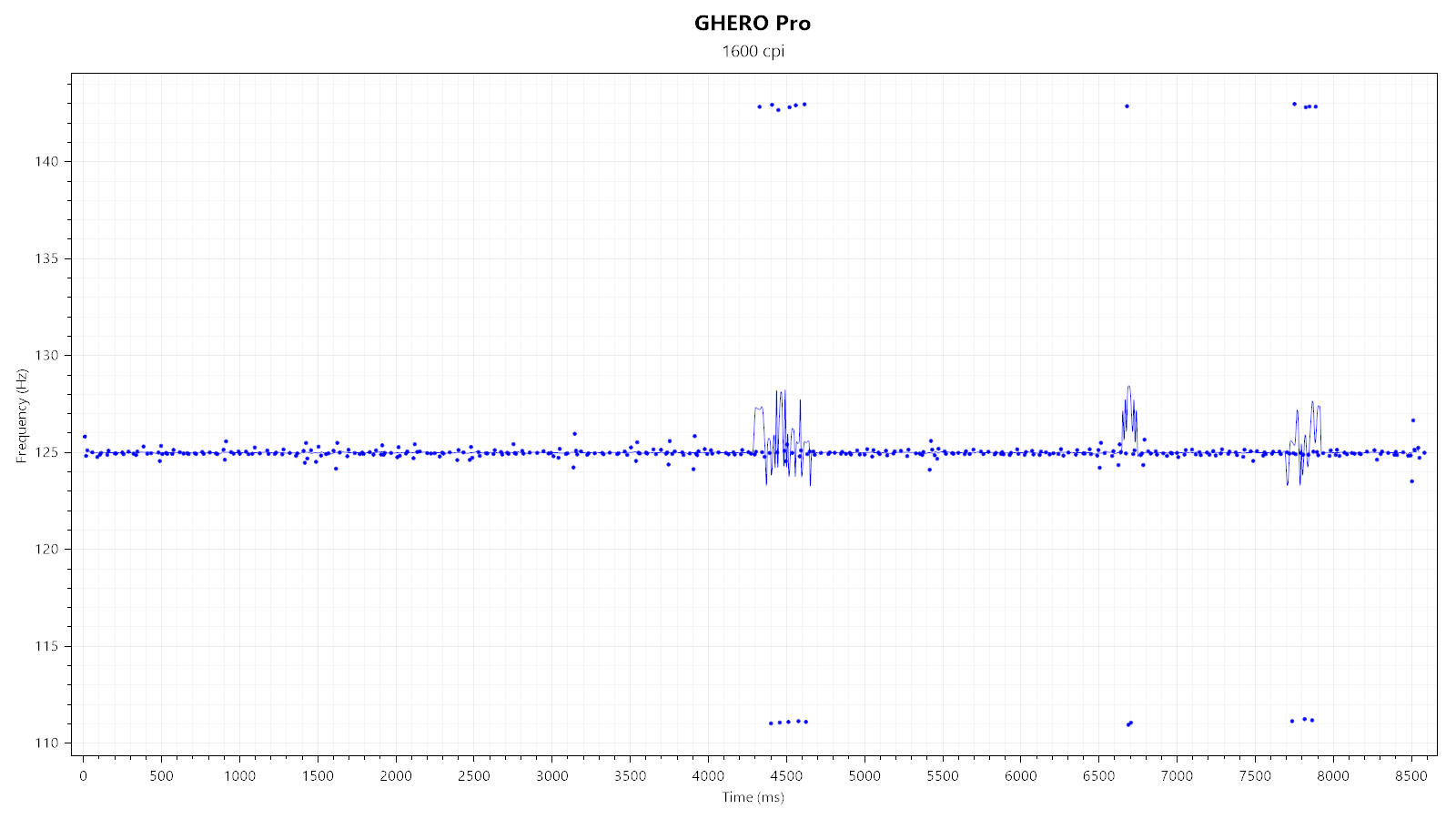
Of the available polling rates (125, 250, 500, or 1000 Hz), only 1000 Hz is fully stable, whereas the others show periodic off-period polls.
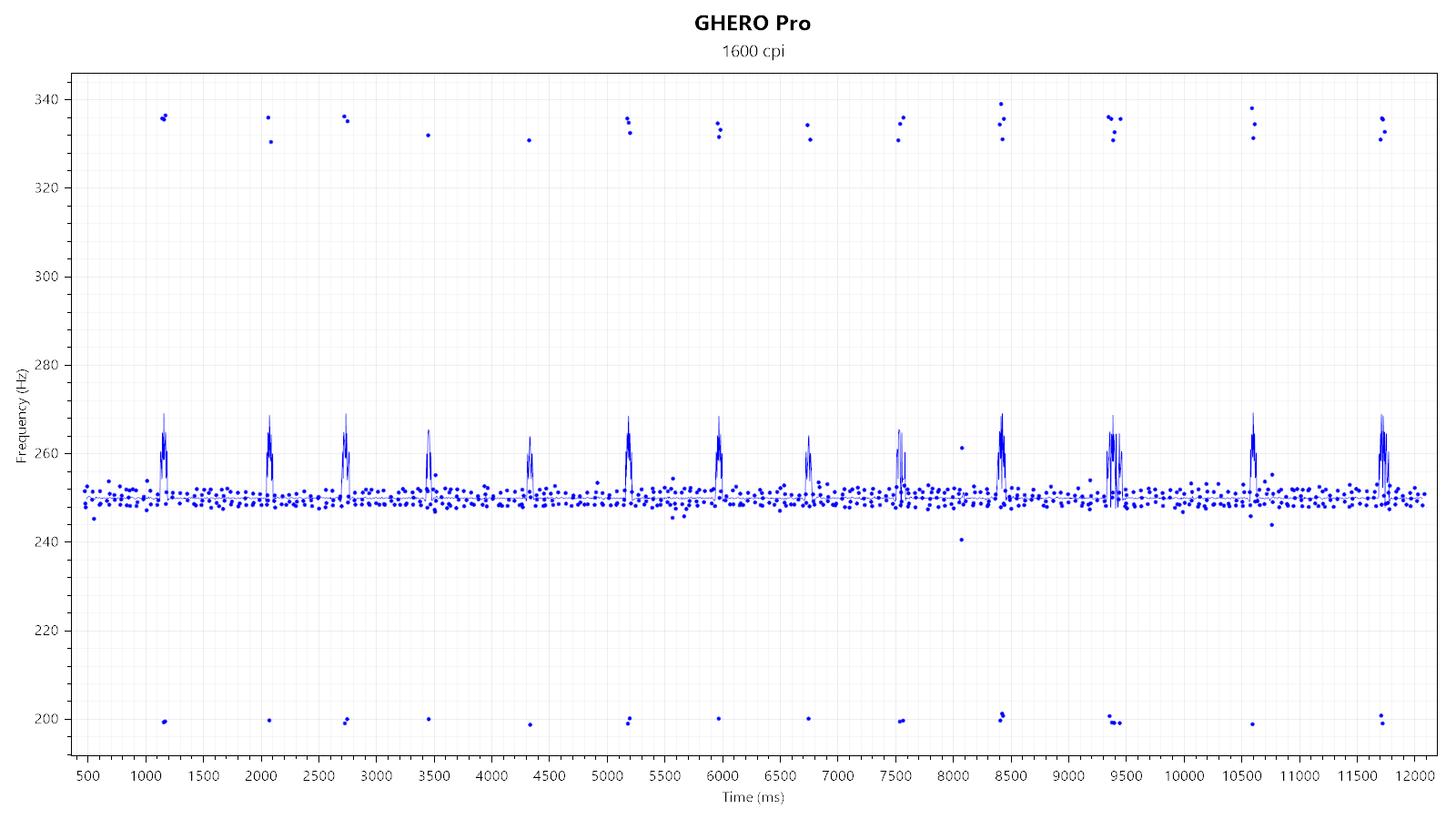
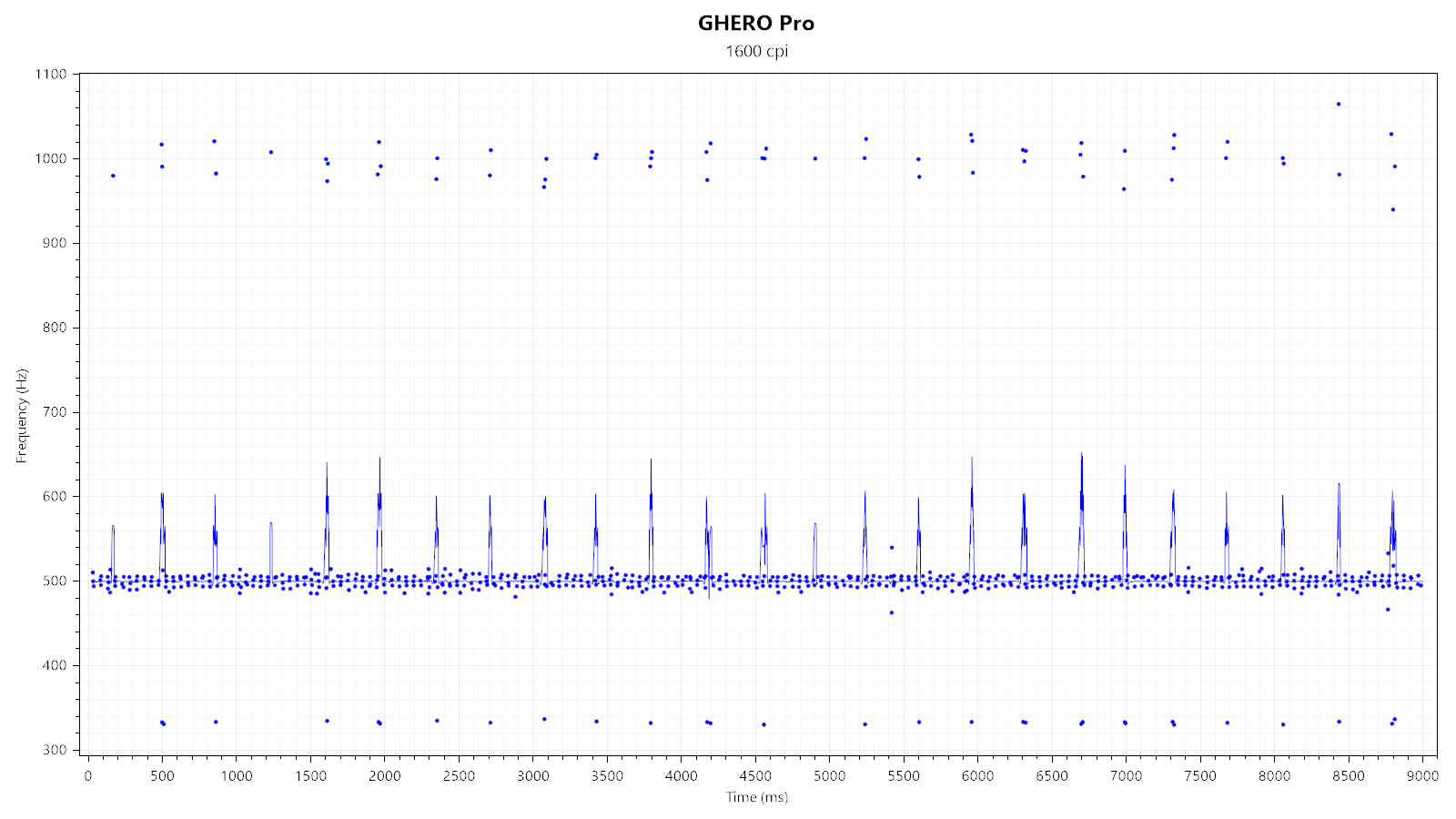
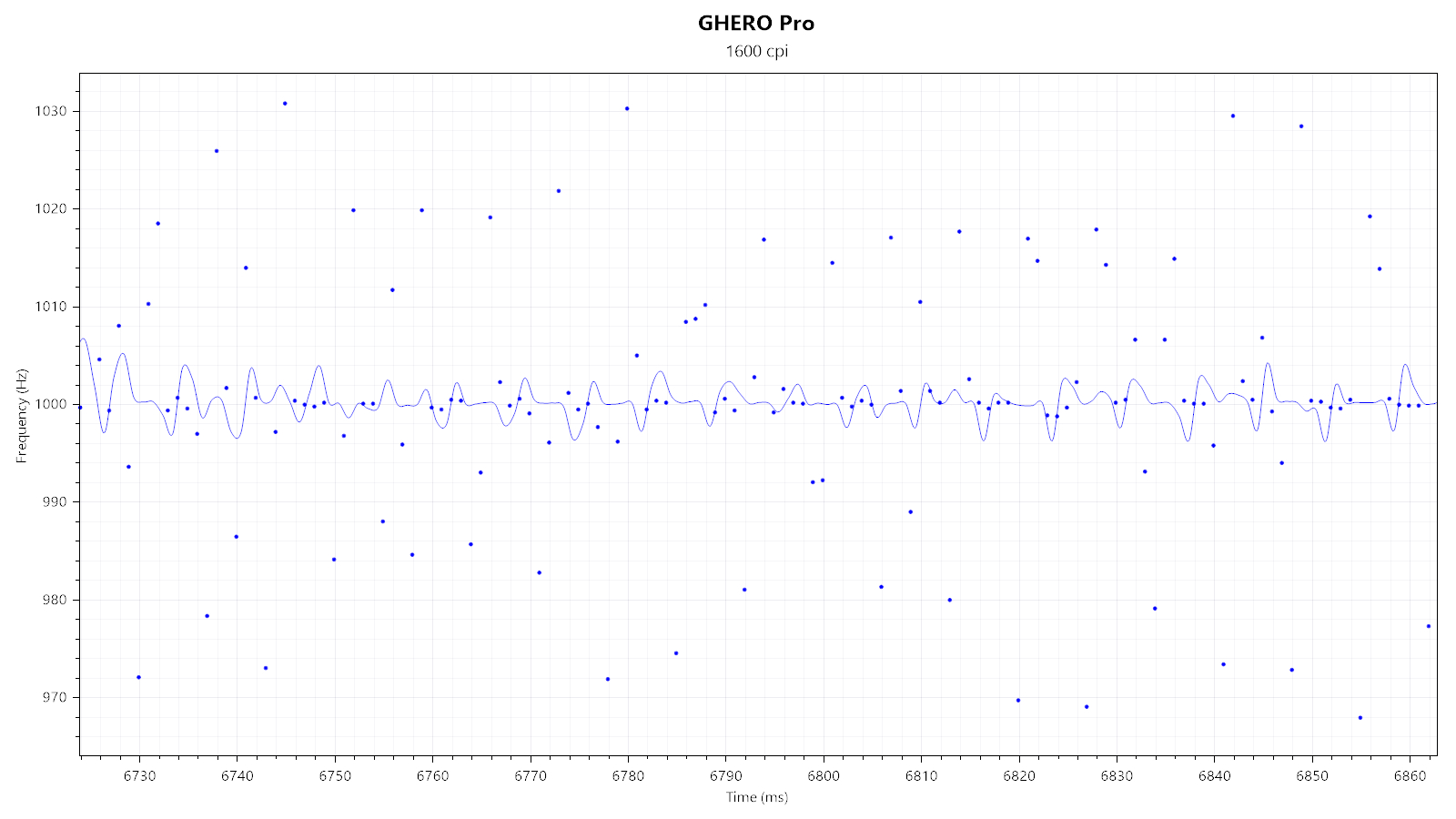
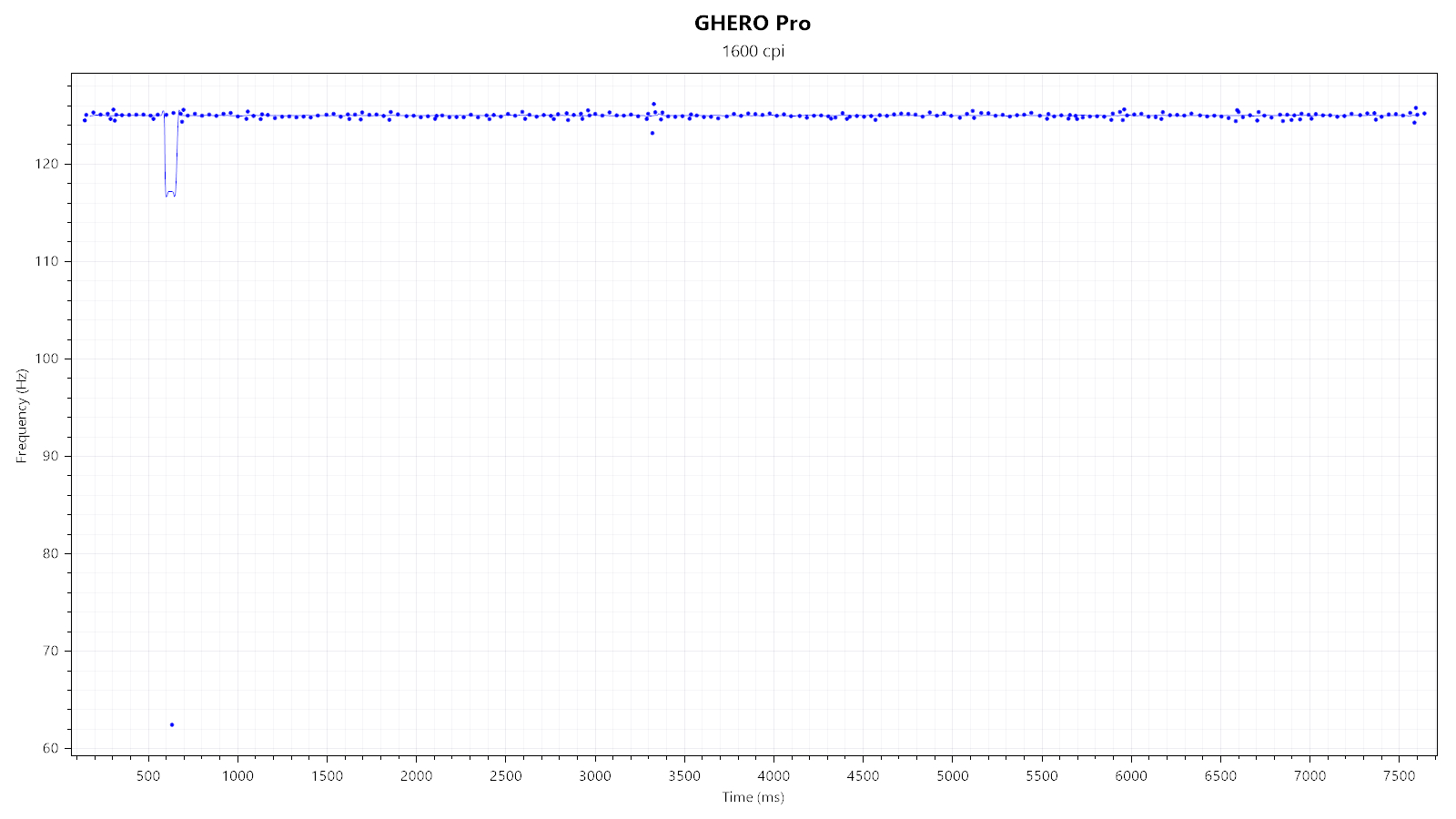
Wireless testing
For wired mice, polling rate stability merely concerns the wired connection between the mouse (SPI communication) and USB. For wireless mice, another device that needs to be kept in sync between the first two is added to the mix: the wireless dongle/wireless receiver. I'm unable to measure all stages of the entire end-to-end signal chain individually, so testing polling-rate stability at the endpoint (the USB) has to suffice here.
First, I'm testing whether SPI, wireless, and USB communication are synchronized. Any of these being out of sync would be indicated by at least one 2 ms report, which would be the result of any desynchronization drift accumulated over time. I'm unable to detect any periodic off-period polls that would be indicative of a desynchronization drift.
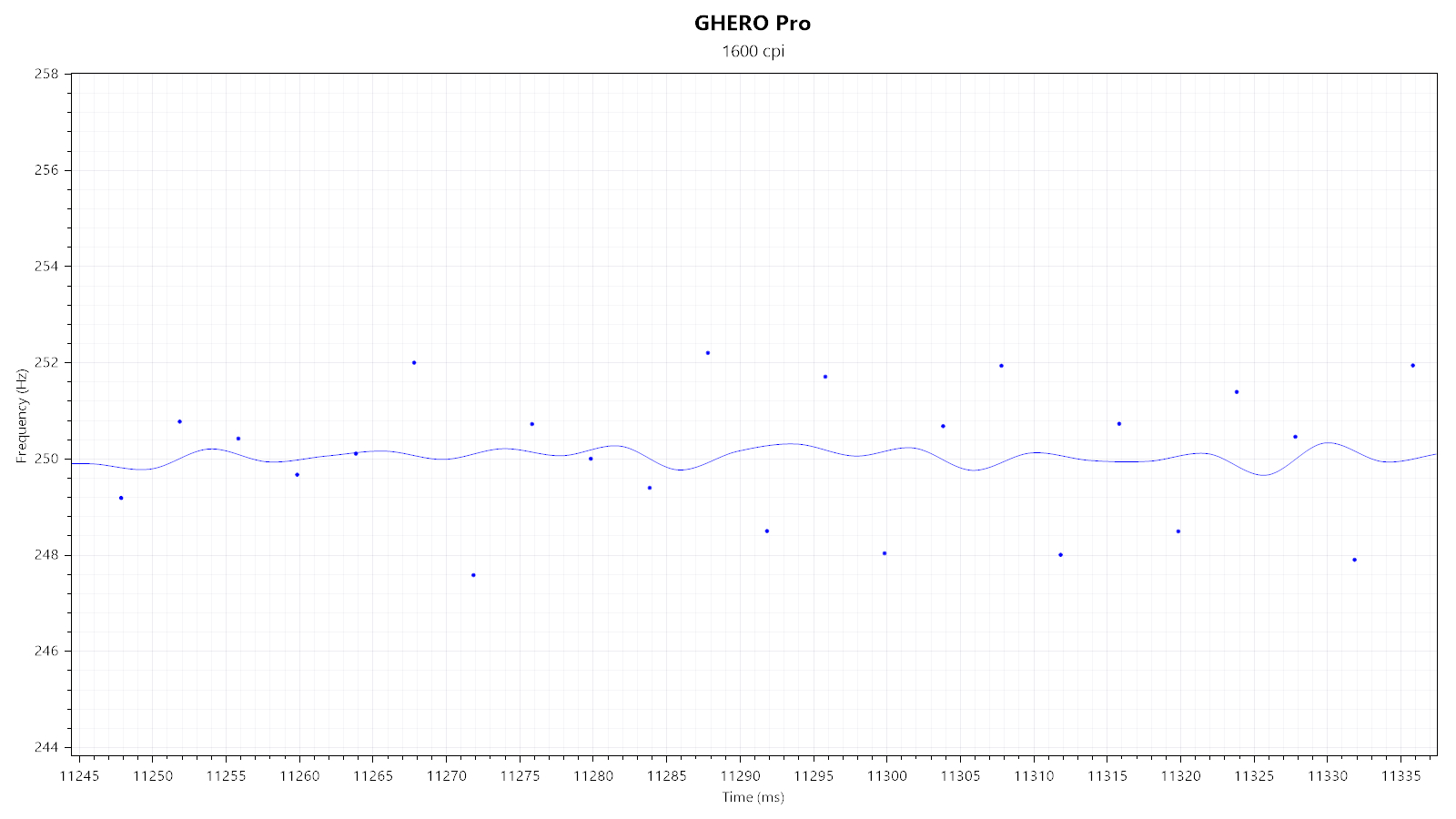
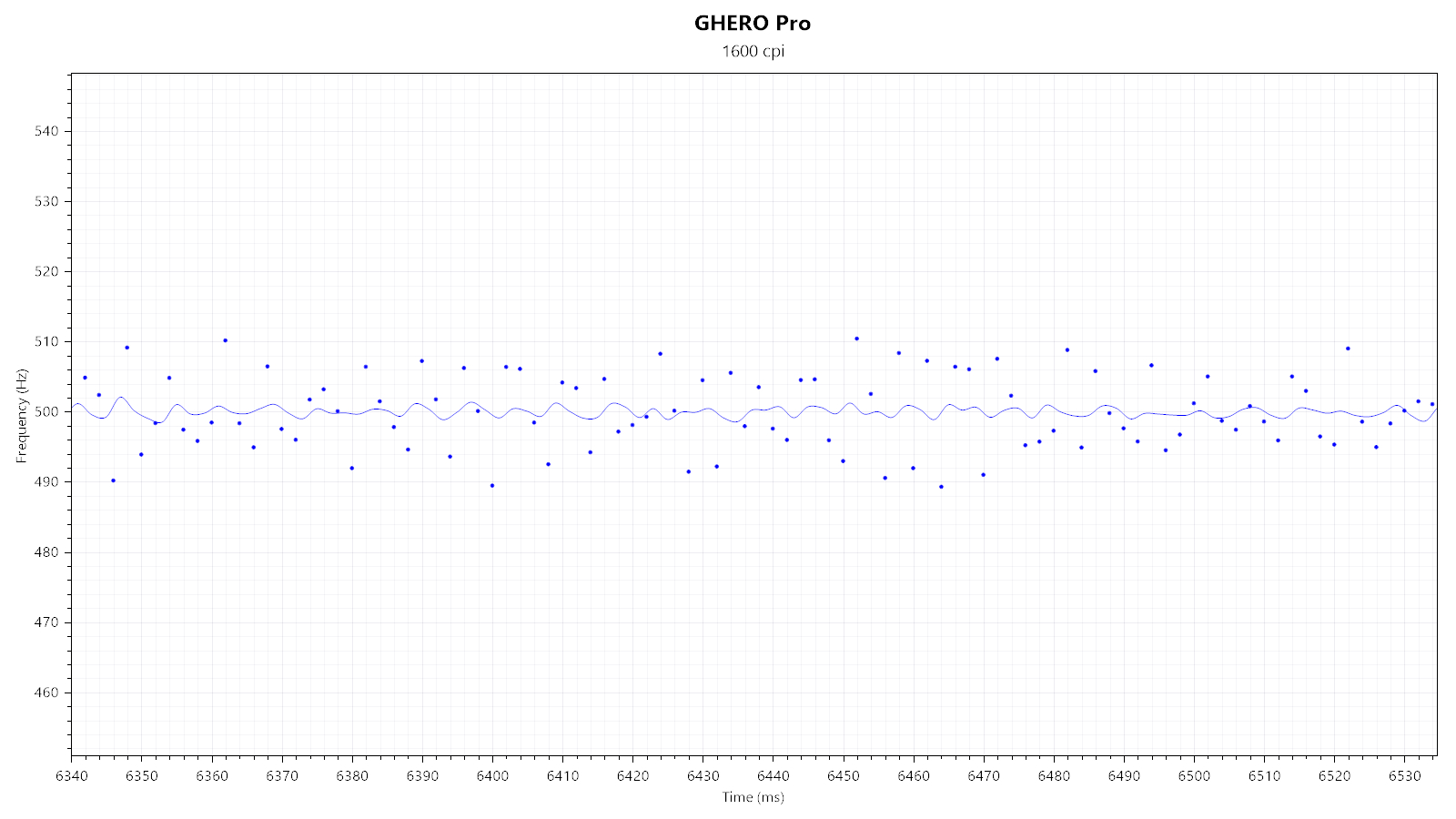
Second, I'm testing the general polling-rate stability of the individual polling rates in wireless mode. Running the GHERO Pro at a lower polling rate can have the benefit of extending battery life. All polling rates are generally stable, save for the odd off-period poll at 125 Hz.
Paint Test
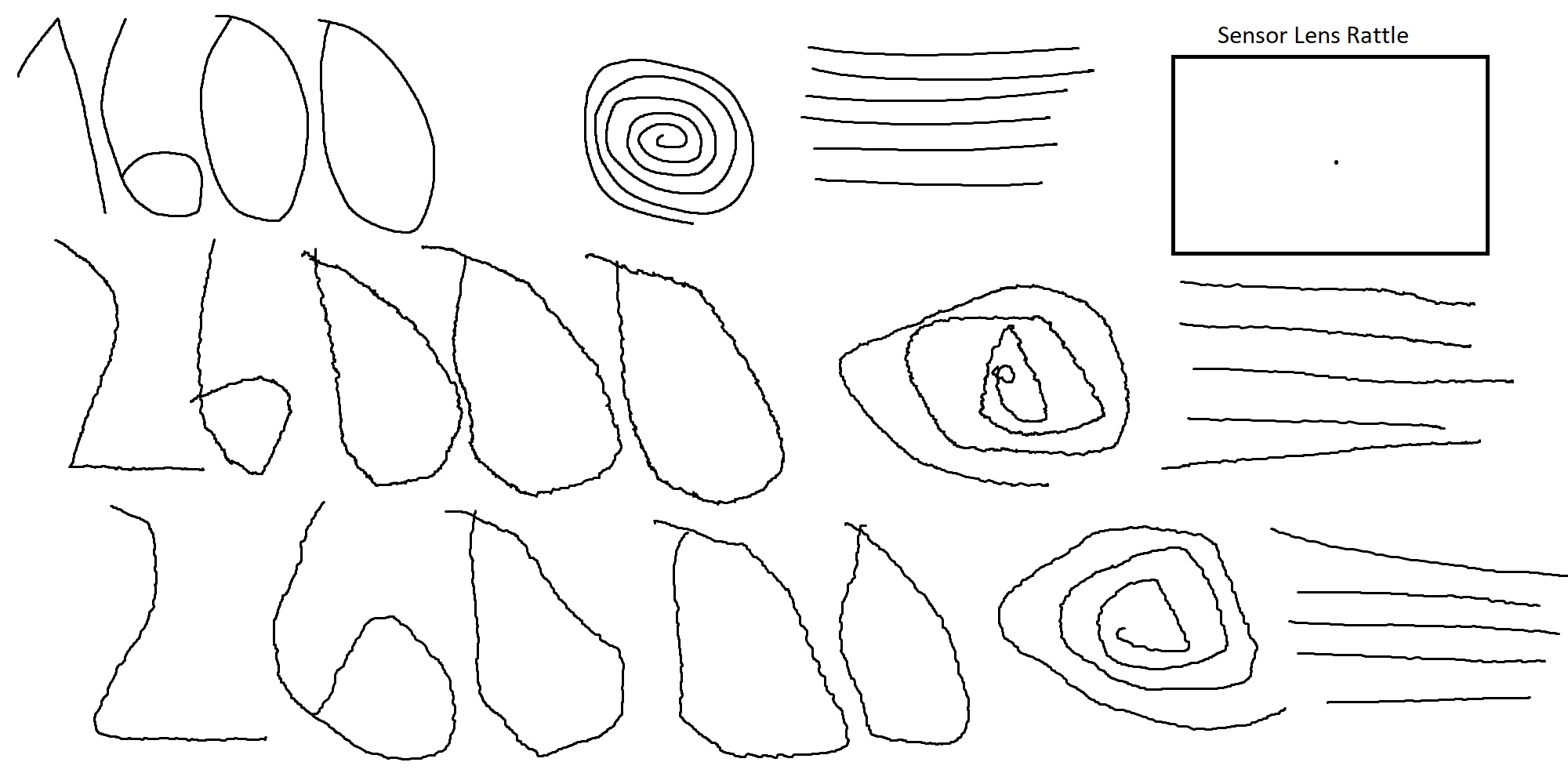
As you can see, no issues with angle snapping can be observed. There is no jitter visible at 1600 CPI. 26,000 CPI shows major jitter, which is only marginally lessened by enabling ripple control (third row). Lastly, there is no lens movement.
Lift-off Distance
The GHERO Pro offers two pre-defined LOD levels. On the "1 mm" setting, the sensor does not track at a height of one DVD. Using the "2 mm" setting, the sensor does track at a height of one DVD, but not at a height of two DVDs (1.2<x<2.4 mm; x=LOD height). Keep in mind that LOD may vary slightly depending on the mousing surface (pad) it is being used on.
Click Latency

In wired mode and at a debounce time of 1 ms, click latency has been measured to be 1.8 ms, with standard deviation being 0.46 ms. In wired mode and at a debounce time of 2 ms, click latency has been measured to be 2.1 ms, with standard deviation being 0.44 ms. In wireless mode and at a debounce time of 1 ms, click latency has been measured to be 2.0 ms, with standard deviation being 0.47 ms. In wireless mode and at a debounce time of 2 ms, click latency has been measured to be 2.2 ms, with standard deviation being 0.38 ms. There not being 1 ms between the 1 and 2 ms debounce time values is not an exception, as scaling isn't entirely linear, and the indicated values do not represent the amount by which debounce time is in fact modified.
Using the 8K dongle, at 1000 Hz, and at a debounce time of 1 ms, click latency has been measured to be 1.5 ms, with standard deviation being 0.21 ms. Using the 8K dongle, at 2000 Hz, and at a debounce time of 1 ms, click latency has been measured to be 1.3 ms, with standard deviation being 0.16 ms. Using the 8K dongle, at 4000 Hz, and at a debounce time of 1 ms, click latency has been measured to be 1.2 ms, with standard deviation being 0.11 ms. Finally, using the 8K dongle, at 8000 Hz, and at a debounce time of 1 ms, click latency has been measured to be 1.2 ms, with standard deviation being 0.15 ms.
The main button switches were measured to be running at 2.02 V. I'm not aware of the voltage specifications of the used Huano switches, but do find this voltage rather low.
Jun 30th, 2025 22:48 CDT
change timezone
Latest GPU Drivers
New Forum Posts
- GravityMark v1.89 GPU Benchmark (303)
- Post your Cinebench 2024 score (658)
- GPU PerfCap Reason PWR (8)
- Laptop overclocking adventures (1238)
- [INTEL]-How To Update Your Microcode for Intel HX 13/14th Gen. CPUs Laptops/Mobile Easily. (172)
- Will you buy a RTX 5090? (584)
- The TPU UK Clubhouse (26530)
- Optane and "enable write caching " (27)
- Question about Intel Optane SSDs (87)
- Do you use Linux? (664)
Popular Reviews
- ASUS ROG Crosshair X870E Extreme Review
- Sapphire Radeon RX 9060 XT Pulse OC 16 GB Review - Samsung Memory Tested
- AVerMedia CamStream 4K Review
- Lexar NQ780 4 TB Review
- AMD Ryzen 7 9800X3D Review - The Best Gaming Processor
- Upcoming Hardware Launches 2025 (Updated May 2025)
- Sapphire Radeon RX 9070 XT Nitro+ Review - Beating NVIDIA
- AMD Ryzen 9 9950X3D Review - Great for Gaming and Productivity
- NVIDIA GeForce RTX 5060 8 GB Review
- ASRock Phantom Gaming Z890 Riptide Wi-Fi Review
TPU on YouTube
Controversial News Posts
- Intel's Core Ultra 7 265K and 265KF CPUs Dip Below $250 (288)
- NVIDIA Grabs Market Share, AMD Loses Ground, and Intel Disappears in Latest dGPU Update (204)
- Some Intel Nova Lake CPUs Rumored to Challenge AMD's 3D V-Cache in Desktop Gaming (140)
- NVIDIA Launches GeForce RTX 5050 for Desktops and Laptops, Starts at $249 (105)
- Microsoft Partners with AMD for Next-gen Xbox Hardware (105)
- Intel "Nova Lake‑S" Series: Seven SKUs, Up to 52 Cores and 150 W TDP (100)
- NVIDIA GeForce RTX 5080 SUPER Could Feature 24 GB Memory, Increased Power Limits (94)
- Reviewers Bemused by Restrictive Sampling of RX 9060 XT 8 GB Cards (88)