 5
5
Marsback Zephyr Pro Review
Software, Lighting & The Fan »Sensor and Performance
The Marsback Zephyr Pro is equipped with the PixArt PMW3389. According to specifications, the 3389 is capable of up to 16,000 CPI, as well as a maximum tracking speed of 400 IPS, which equals 10.16 m/s. Out of the box, seven pre-defined CPI steps are available: 400, 800, 1200, 1600, 2400, 3200, and 16,000.CPI Accuracy
"CPI" (short for counts per inch) describes the number of counts registered by the mouse if it is moved exactly an inch. There are several factors (firmware, mounting height of the sensor not meeting specifications, mouse feet thickness, mousing surface, among others) which may contribute to nominal CPI not matching actual CPI. It is impossible to always achieve a perfect match, but ideally, nominal and actual CPI should differ as little as possible. In this test, I'm determining whether this is the case or not. However, please keep in mind that said variance will still differ from unit to unit, so your mileage may vary.
I've restricted my testing to the four most common CPI steps, which are 400, 800, 1600, and 3200. As you can see, deviation is consistently positive and somewhat significant. An average result overall. In order to account for the measured deviation, adjusted steps of 400, 800, 1550, and 3100 CPI have been used for testing.
Motion Delay
"Motion delay" encompasses all kinds of sensor lag. Any further sources of input delay will not be recorded in this test. The main thing I'll be looking for in this test is sensor smoothing, which describes an averaging of motion data across several capture frames in order to reduce jitter at higher CPI values, increasing motion delay along with it. The goal here is to have as little smoothing as possible. As there is no way to accurately measure motion delay absolutely, it can only be done by comparison with a control subject that has been determined to have the lowest possible motion delay. In this case, the control subject is a G403, whose 3366 has no visible smoothing across the entire CPI range. Note that the G403 is moved first and thus receives a slight head start.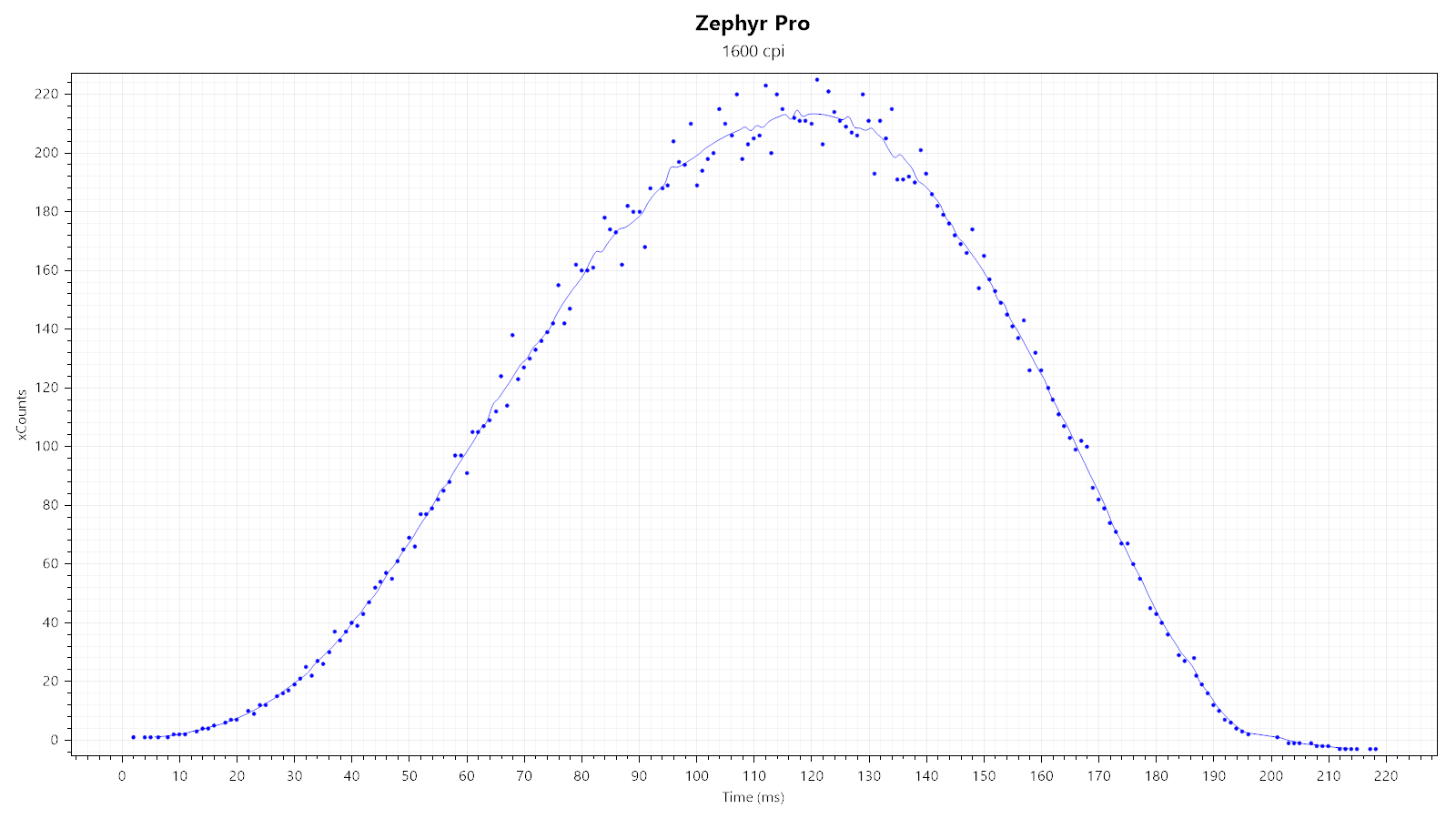
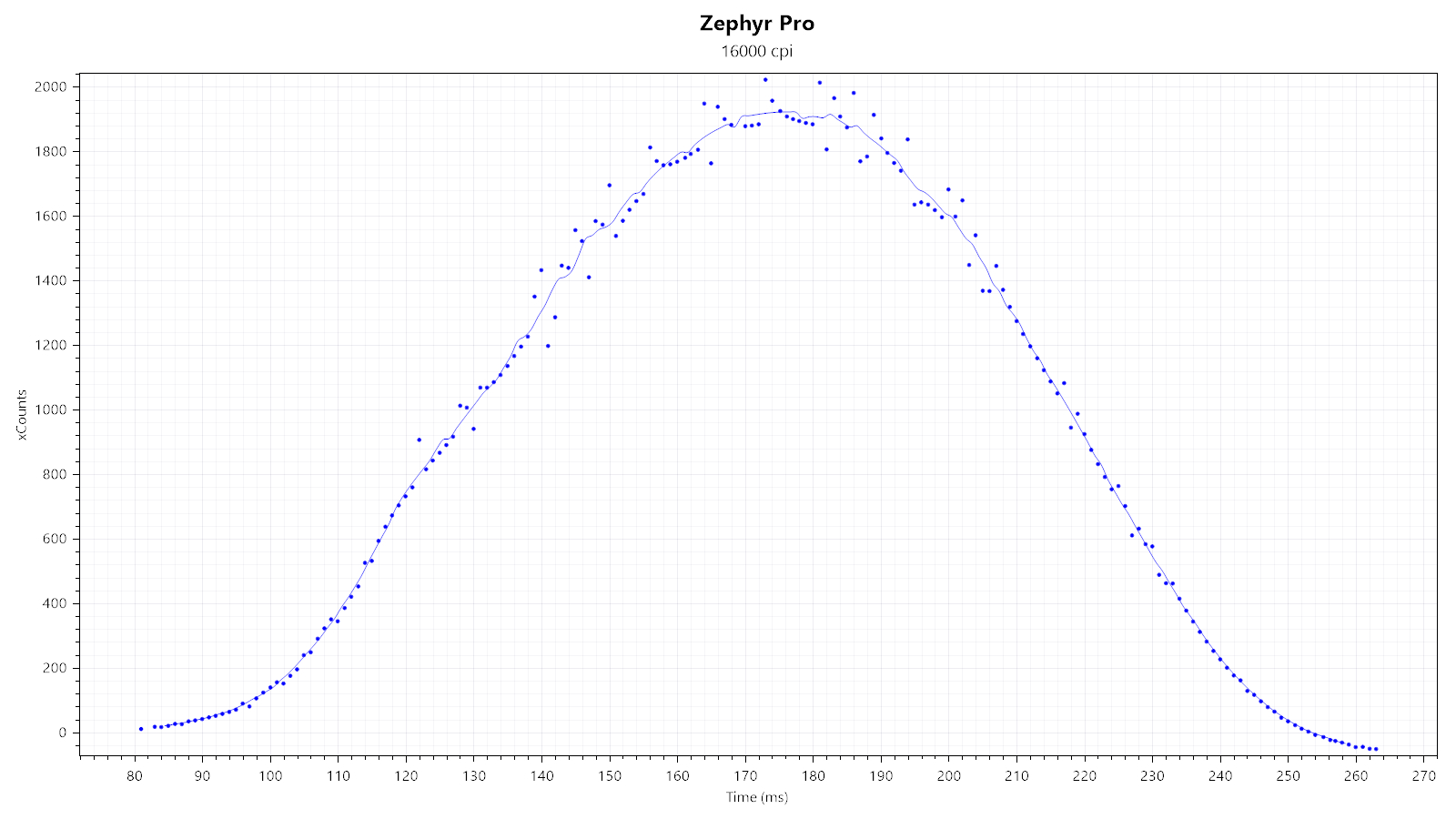
First, I'm looking at two xCounts plots—generated at 1600 and 16,000 CPI—to quickly gauge whether there is any smoothing, which would be indicated by any visible "kinks." The 16,000 CPI plot shows little more than the hint of a kink, so to be sure, we'll have to tend to xSum testing. Typically, the 3389 would be expected to have 32 frames of smoothing at and above 1900 CPI that is then doubled at 6000 and 11,300 CPI.
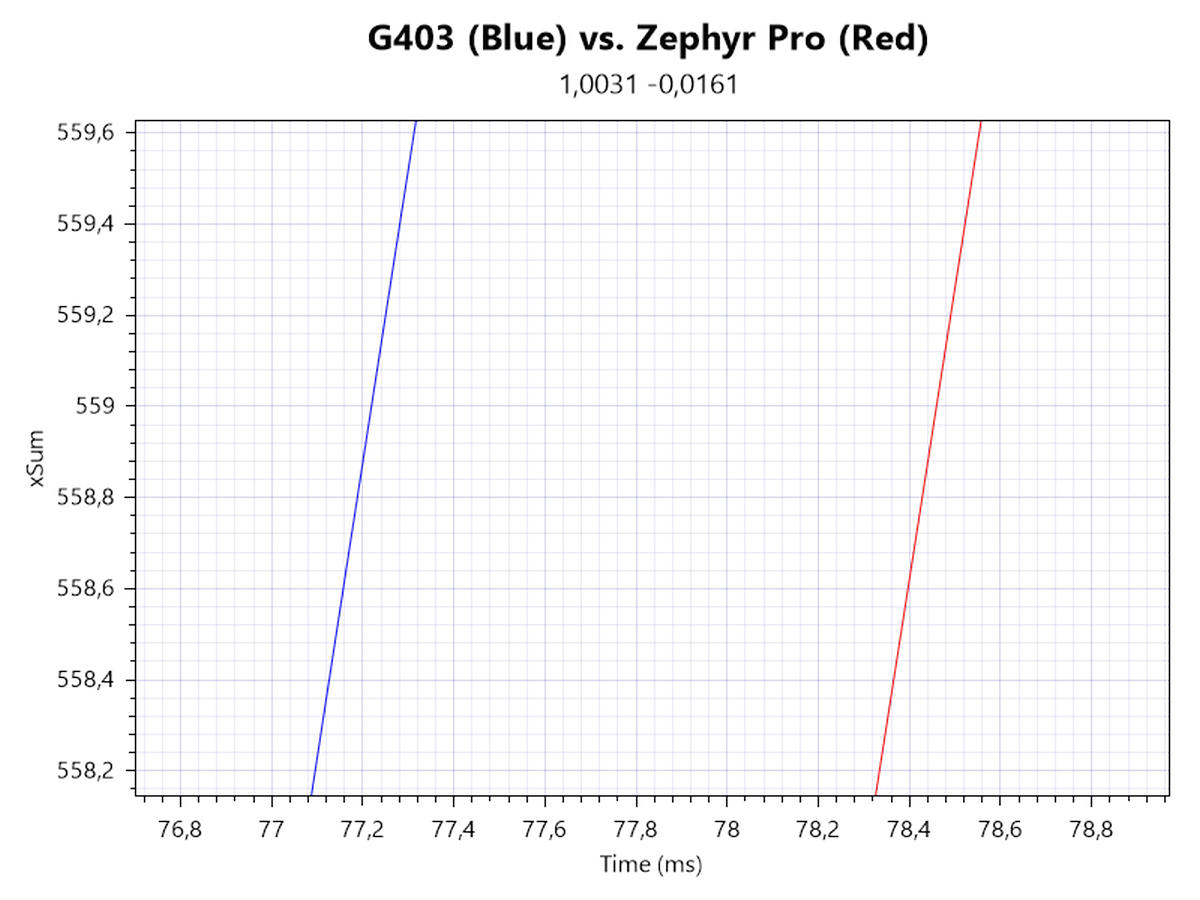
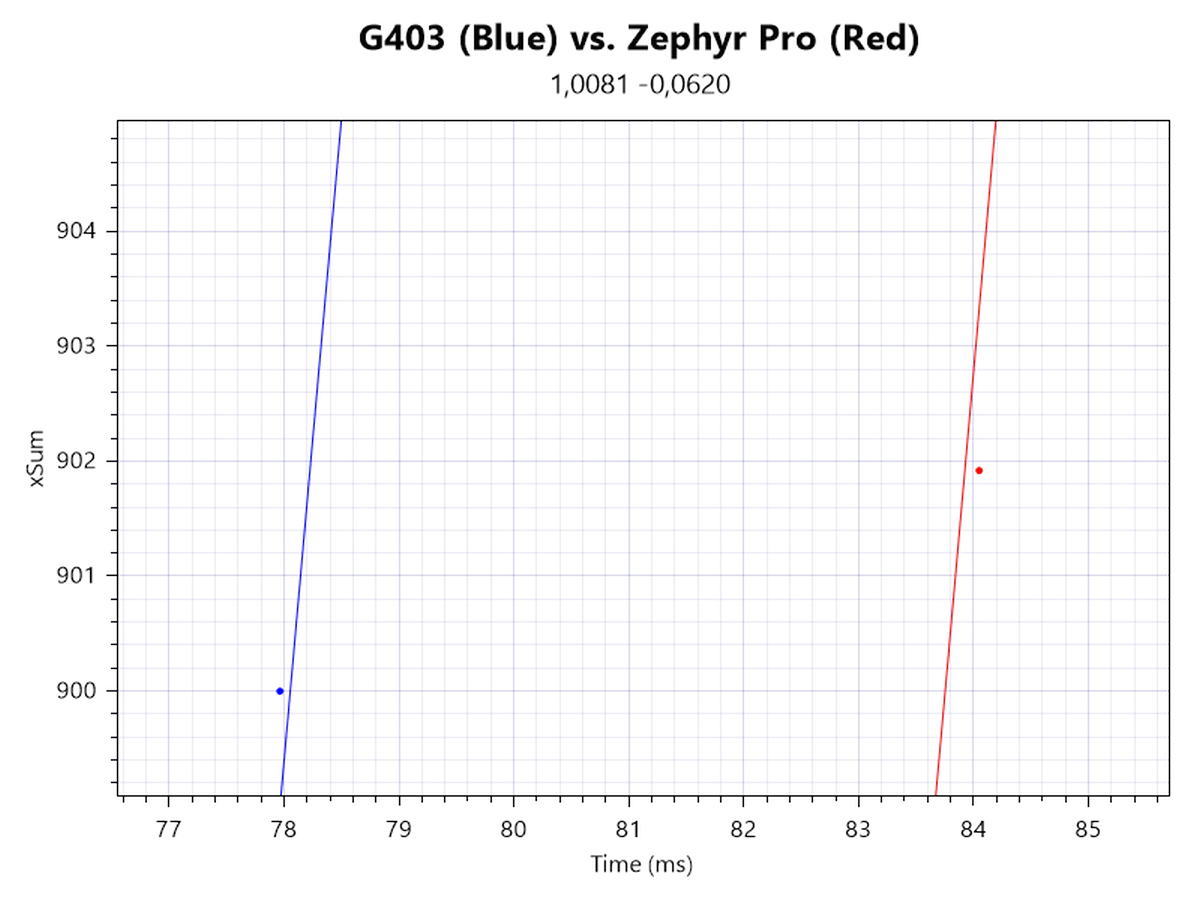
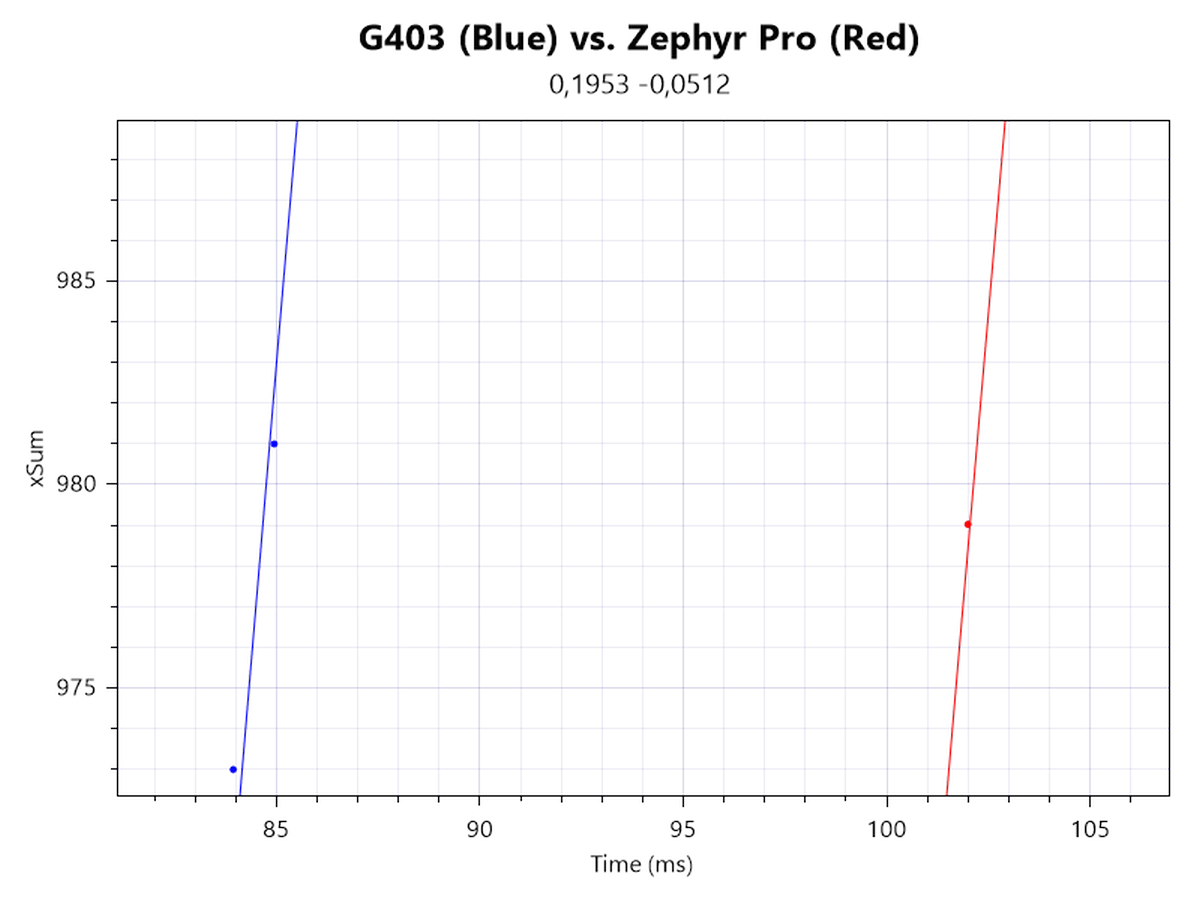
In order to determine motion delay, I'm looking at xSum plots generated at 1600, 3200, and 16,000 CPI. The line further to the left denotes the sensor with less motion delay. 1600 CPI shows a motion delay differential of roughly 1 ms, which is unrelated to smoothing. 3200 CPI displays a differential of roughly 5 ms, and 16,000 CPI a differential of roughly 16 ms.
Speed-related Accuracy Variance (SRAV)
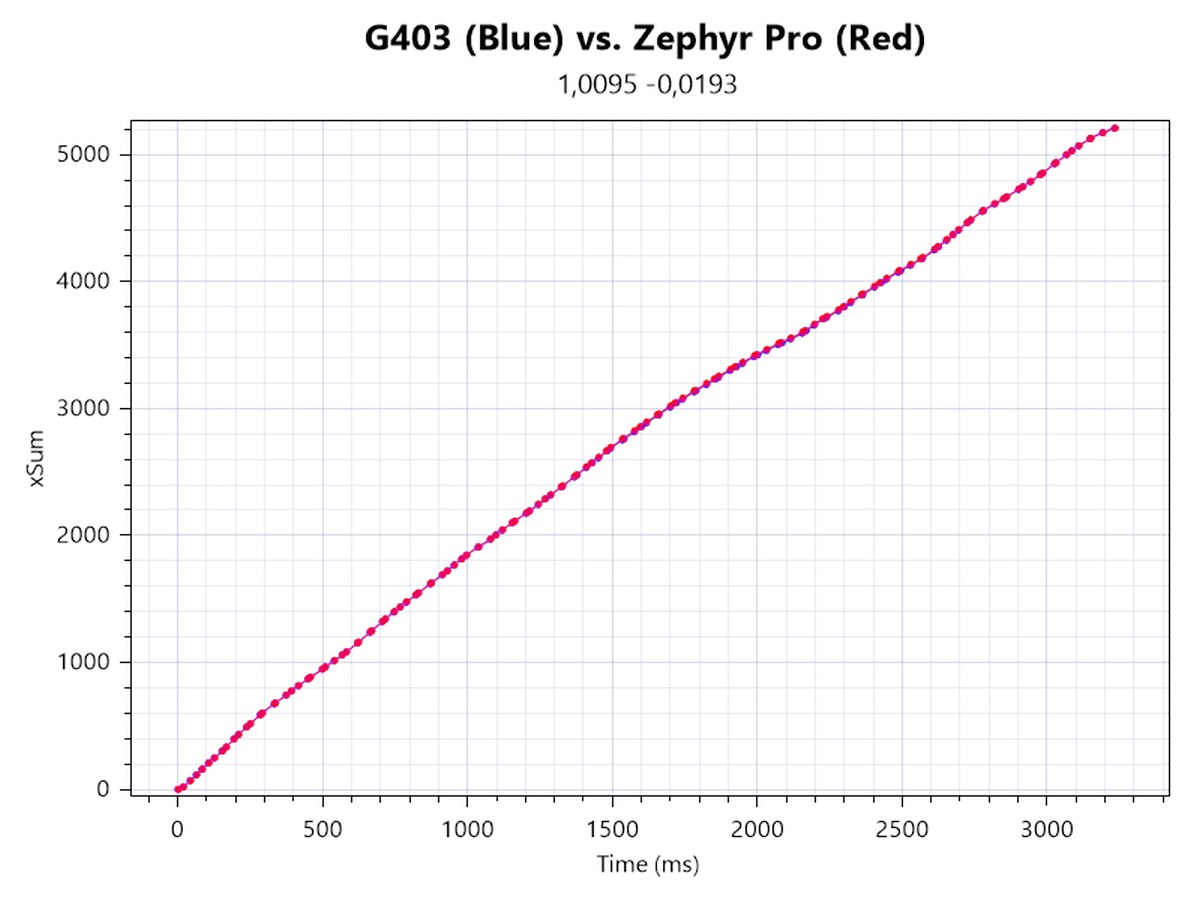
What people typically mean when they talk about "acceleration" is speed-related accuracy variance (or SRAV for short). It's not about the mouse having a set amount of inherent positive or negative acceleration, but about the cursor not traveling the same distance if the mouse is moved the same physical distance at different speeds. The easiest way to test this is by comparison with a control subject that is known to have very low SRAV, which in this case is the G403. As you can see from the plot, no displacement between the two cursor paths can be observed, which confirms that SRAV is very low.
Perfect Control Speed
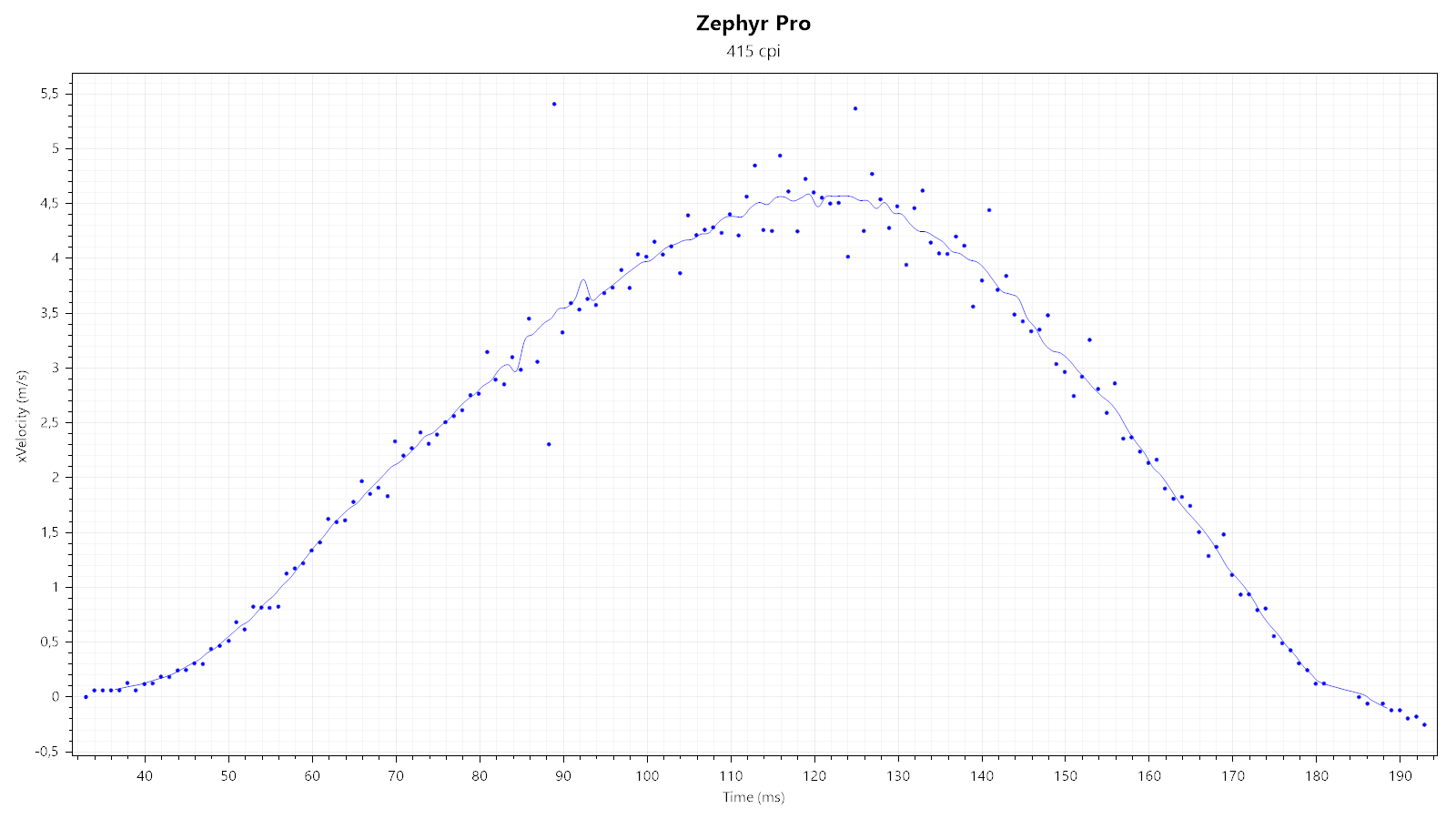
Perfect Control Speed (or PCS for short) is the maximum speed up to which the mouse and its sensor can be moved without the sensor malfunctioning in any way. I've only managed to hit a measly 4.5 m/s, which is within the proclaimed PCS range and shows no sign of the sensor malfunctioning.
Polling Rate Stability
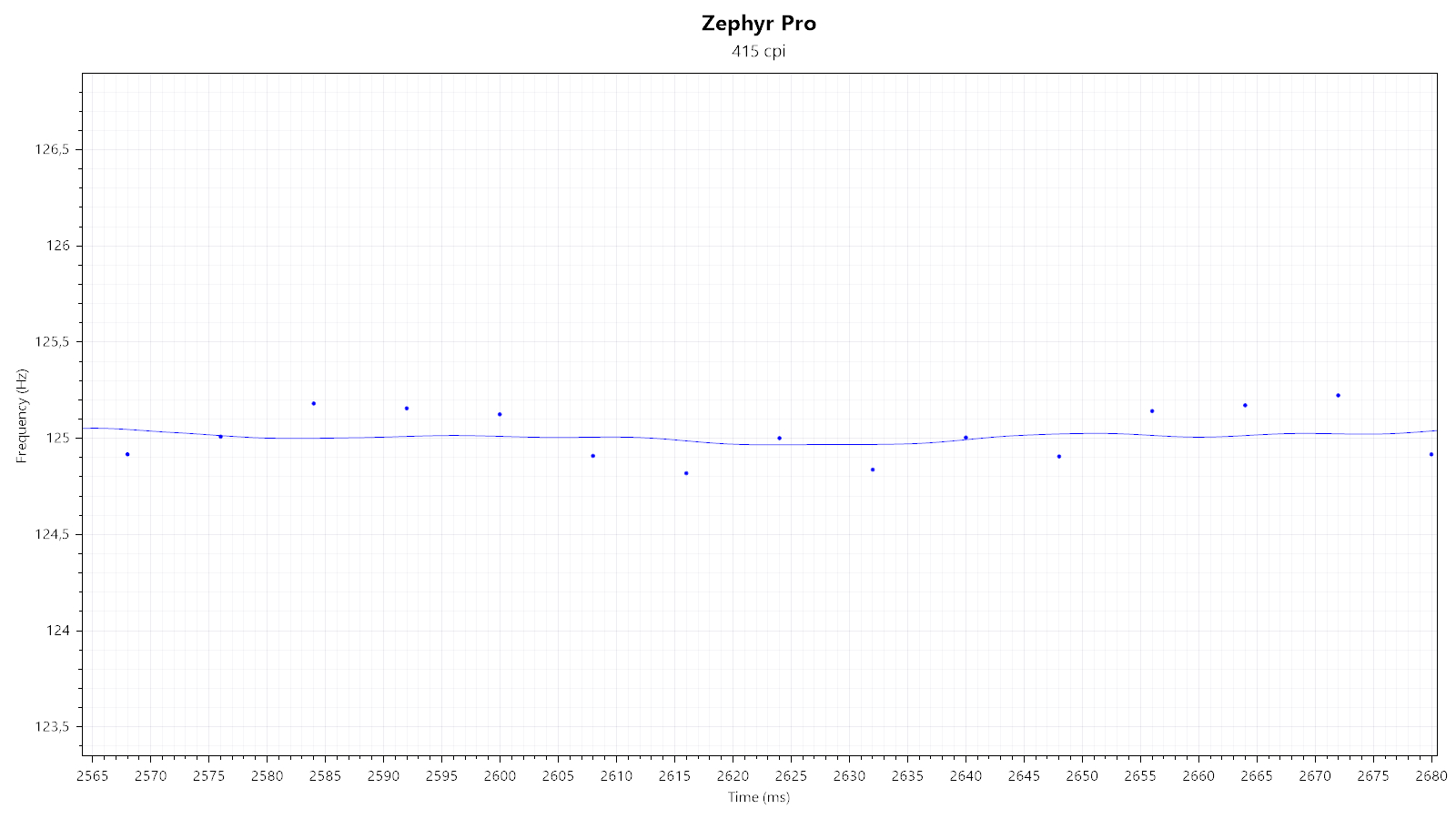
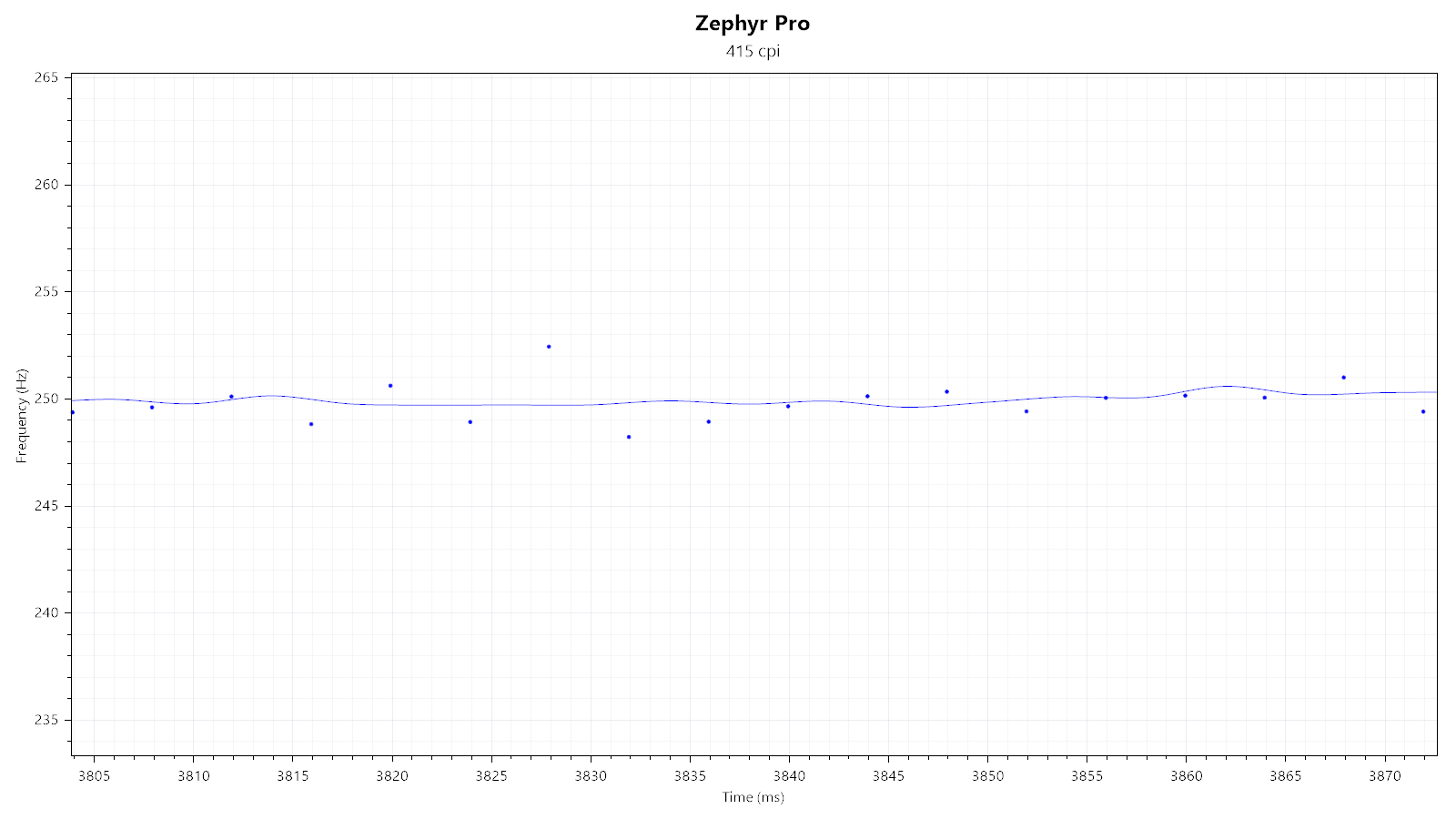
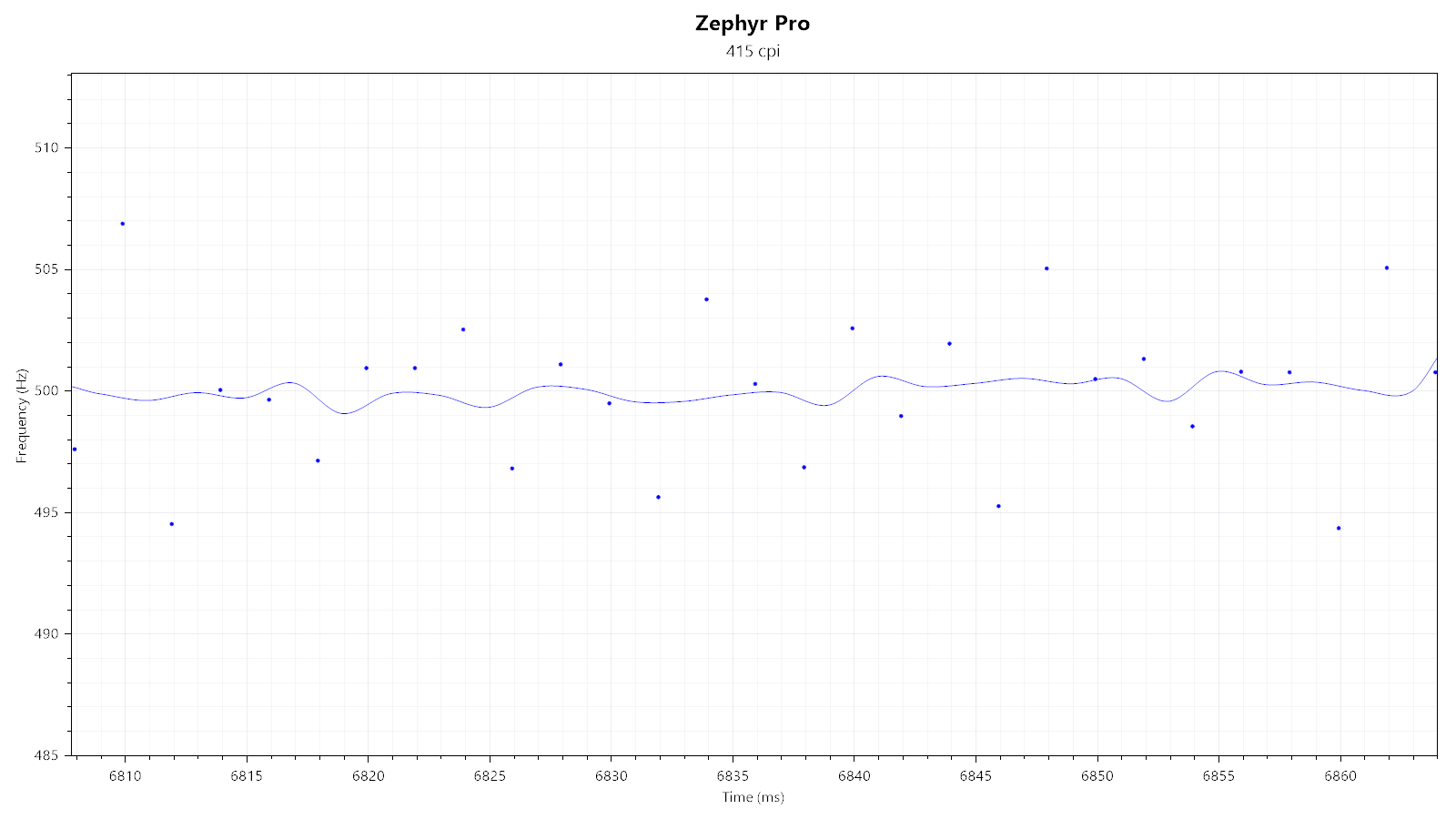
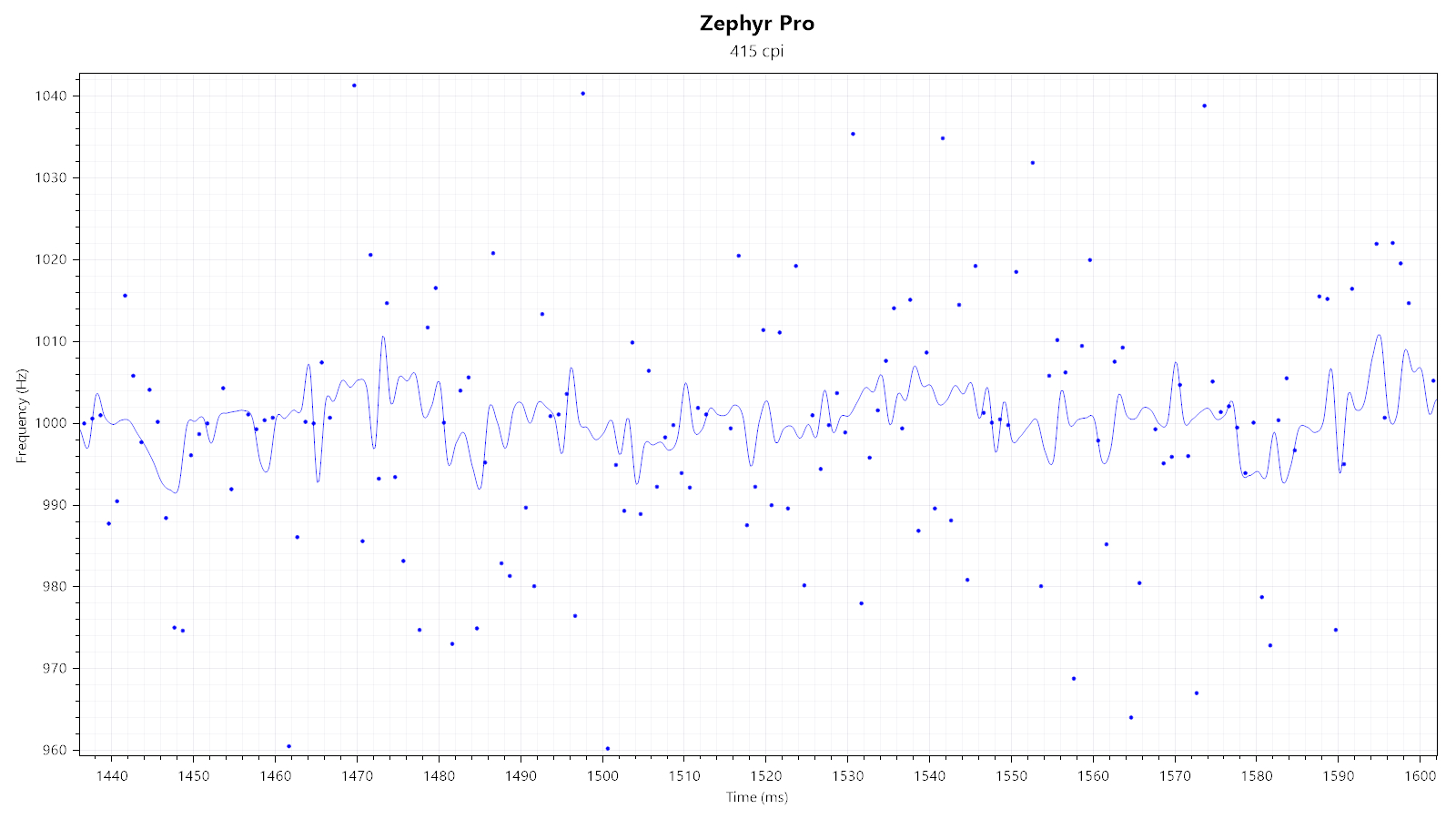
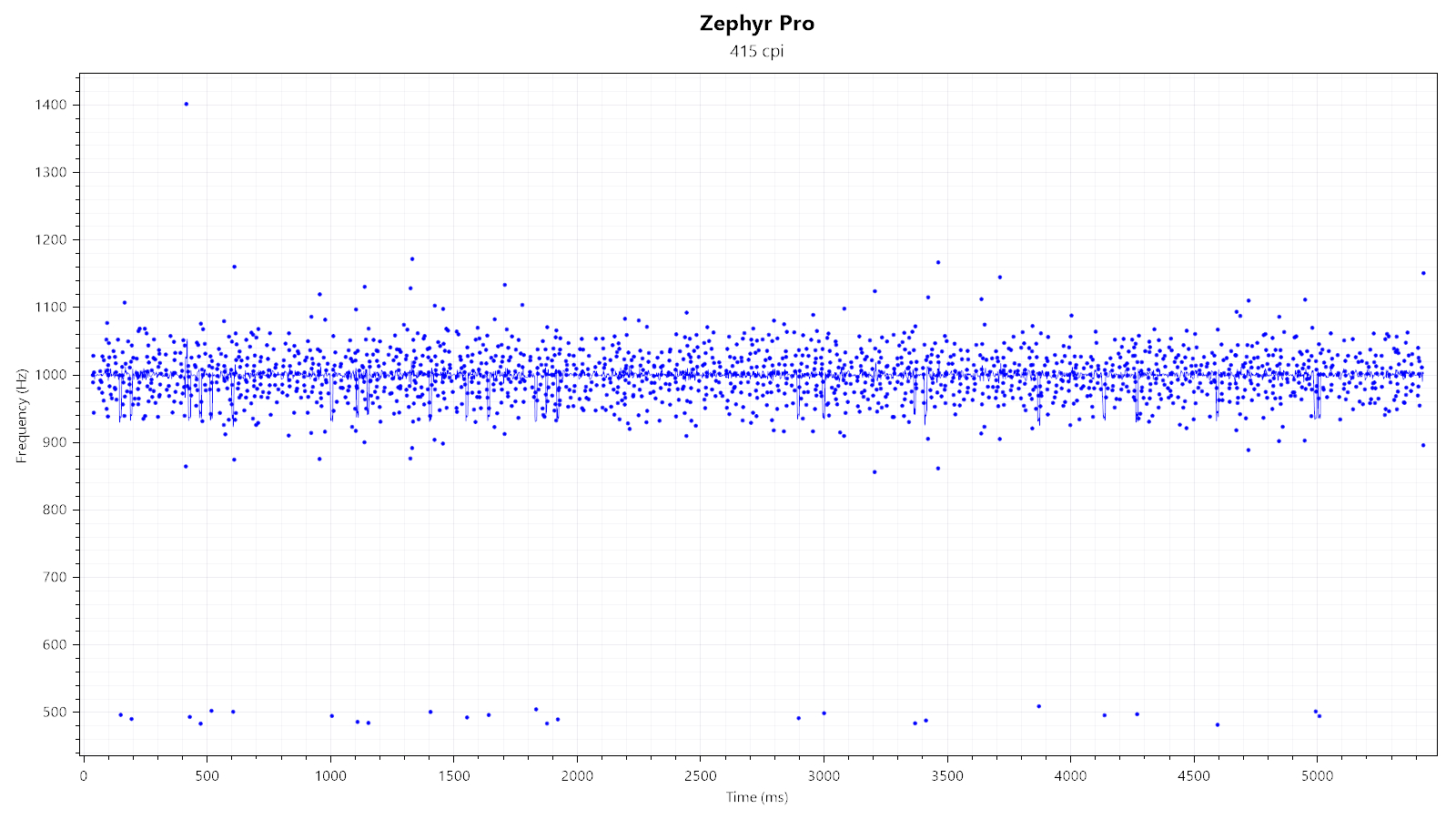
All of the available polling rate settings (125/250/500/1000 Hz) look and perform fine as long as certain RGB lighting effects aren't selected. The lighting effects going by the names Color Change the Tail, Nuu, Colorful Time, and Finger Movement all introduce polling instability to varying degrees, as shown below:
Paint Test
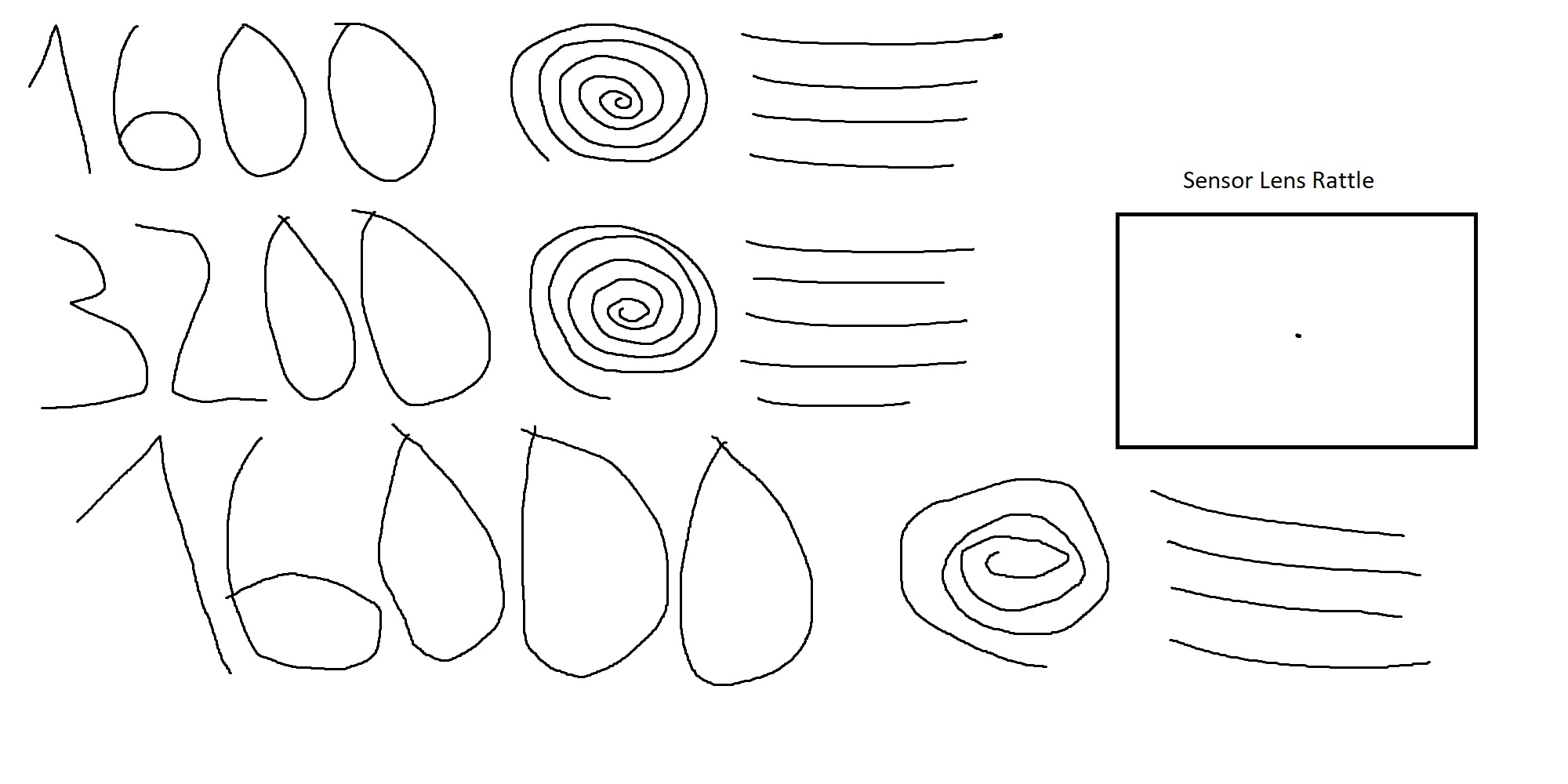
This test is used to indicate any potential issues with angle snapping (non-native straightening of linear motion) and jitter, along with any sensor lens rattle. As you can see, no issues with angle snapping can be observed. No jitter is visible at 1600 and 3200 CPI, the latter of which already has smoothing applied. 16,000 CPI still looks surprisingly well-controlled owing to a ridiculous amount of smoothing. Lastly, no sensor lens movement can be observed.
Lift-off Distance
The Zephyr Pro offers two pre-defined LOD levels. At the "Low" setting, the sensor does not track at a height of 1 DVD. Using the "High" setting, the sensor does track at a height of 2 DVDs (2.4 mm<x<3.6 mm, with x being LOD height), but not at a height of 3 DVDs. Keep in mind that LOD may vary slightly depending on the mousing surface (pad) it is being used on.Click Latency

Since mechanical switches are being used for the buttons in most computer mice, debouncing is required in order to avoid unintended double clicks. Debouncing typically adds a delay (along with any potential processing delay), which shall be referred to as click latency. As there is no way to measure said delay directly, it has to be done by comparing it to a control subject, which in this case is the Logitech G100s. Within the software, a setting called Key Response can be found, which seemingly controls click latency. Contrary to what the slider suggests, this setting doesn't range from 1 to 100 ms, but rather from 0.1 to 10 ms. Using the "1 ms" setting, click latency has been measured to be roughly +0.2 ms when compared to the SteelSeries Ikari, which is considered as the baseline with 0 ms, with standard deviation being 0.84 ms. The "20 ms" setting has been measured to be +2.0 ms, with a standard deviation of 0.70 ms, and the "100 ms" setting to be +9.9 ms, with a standard deviation of 0.76 ms. Please keep in mind that the measured value is not the absolute click latency. Comparison data comes from this thread as well as my own testing, using qsxcv's program.
Apr 7th, 2025 22:38 EDT
change timezone
Latest GPU Drivers
New Forum Posts
- Question about Intel Optane SSDs (70)
- is it worth using ssd with usb2? (9)
- USB case with dual USB-C and dual USB-A (6)
- The TPU UK Clubhouse (26058)
- Help me pick a UPS (88)
- Anyone with true HDDs still around here? (336)
- 12v lines 0 reads occansionally (2)
- Someone run games on AMD BC-250 under Linux * Cut down PS5 die to 6 CPU cores 24 GPU cores for use in crypto mining (79)
- RX 9000 series GPU Owners Club (236)
- The coffee and tea drinkers club. (246)
Popular Reviews
- The Last Of Us Part 2 Performance Benchmark Review - 30 GPUs Compared
- UPERFECT UStation Delta Max Review - Two Screens In One
- ASUS Prime X870-P Wi-Fi Review
- PowerColor Radeon RX 9070 Hellhound Review
- Upcoming Hardware Launches 2025 (Updated Apr 2025)
- Sapphire Radeon RX 9070 XT Pulse Review
- MCHOSE L7 Pro Review
- Corsair RM750x Shift 750 W Review
- Sapphire Radeon RX 9070 XT Nitro+ Review - Beating NVIDIA
- DDR5 CUDIMM Explained & Benched - The New Memory Standard
Controversial News Posts
- NVIDIA GeForce RTX 5060 Ti 16 GB SKU Likely Launching at $499, According to Supply Chain Leak (159)
- MSI Doesn't Plan Radeon RX 9000 Series GPUs, Skips AMD RDNA 4 Generation Entirely (146)
- Microsoft Introduces Copilot for Gaming (124)
- AMD Radeon RX 9070 XT Reportedly Outperforms RTX 5080 Through Undervolting (119)
- NVIDIA Reportedly Prepares GeForce RTX 5060 and RTX 5060 Ti Unveil Tomorrow (115)
- Over 200,000 Sold Radeon RX 9070 and RX 9070 XT GPUs? AMD Says No Number was Given (100)
- NVIDIA GeForce RTX 5050, RTX 5060, and RTX 5060 Ti Specifications Leak (97)
- Nintendo Switch 2 Launches June 5 at $449.99 with New Hardware and Games (92)