 3
3
LTC MoshPit WHM-01 Review
Software, Lighting & Battery Life »Sensor and Performance
The LTC MoshPit WHM-01 is equipped with the PixArt PAW3335. According to specifications, the 3335 is capable of up to 16,000 CPI, as well as a maximum tracking speed of 400 IPS, which equals 10.16 m/s. Out of the box, six pre-defined CPI steps are available: 800, 1600, 2400, 3600, 5000, and 16,000 CPI.CPI Accuracy
"CPI" (short for counts per inch) describes the number of counts registered by the mouse if it is moved exactly an inch. There are several factors (firmware, mounting height of the sensor not meeting specifications, mouse feet thickness, mousing surface, among others) which may contribute to nominal CPI not matching actual CPI. It is impossible to always achieve a perfect match, but ideally, nominal and actual CPI should differ as little as possible. In this test, I'm determining whether this is the case or not. However, please keep in mind that said variance will still differ from unit to unit, so your mileage may vary.
I've restricted my testing to the four most common CPI steps, which are 400, 800, 1600, and 3200. As you can see, deviation is consistently positive and as massive as it is inconsistent. A poor result overall. In order to account for the measured deviation, adjusted but still inaccurate steps of 400, 700, 1400, and 2900 CPI have been used for testing.
Motion Delay
"Motion delay" encompasses all kinds of sensor lag. Any further sources of input delay will not be recorded in this test. The main thing I'll be looking for in this test is sensor smoothing, which describes an averaging of motion data across several capture frames in order to reduce jitter at higher CPI values, increasing motion delay along with it. The goal here is to have as little smoothing as possible. As there is no way to accurately measure motion delay absolutely, it can only be done by comparison with a control subject that has been determined to have the lowest possible motion delay. In this case, the control subject is a G403, whose 3366 has no visible smoothing across the entire CPI range. Note that the G403 is moved first and thus receives a slight head start.Wired testing
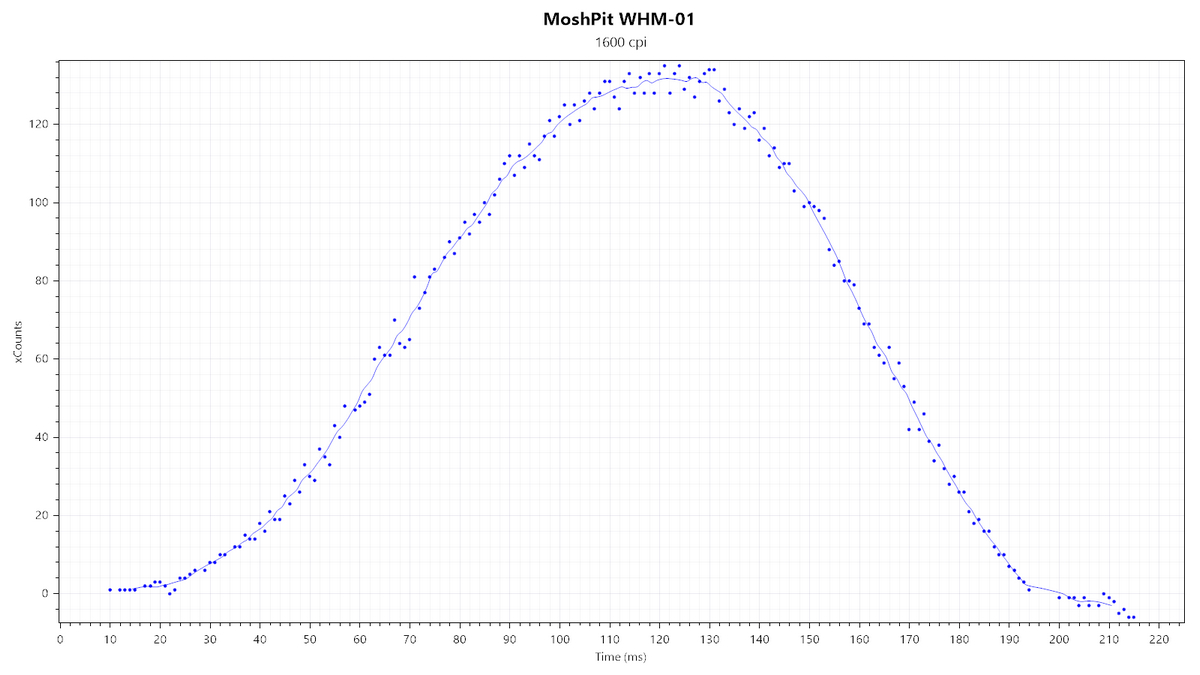
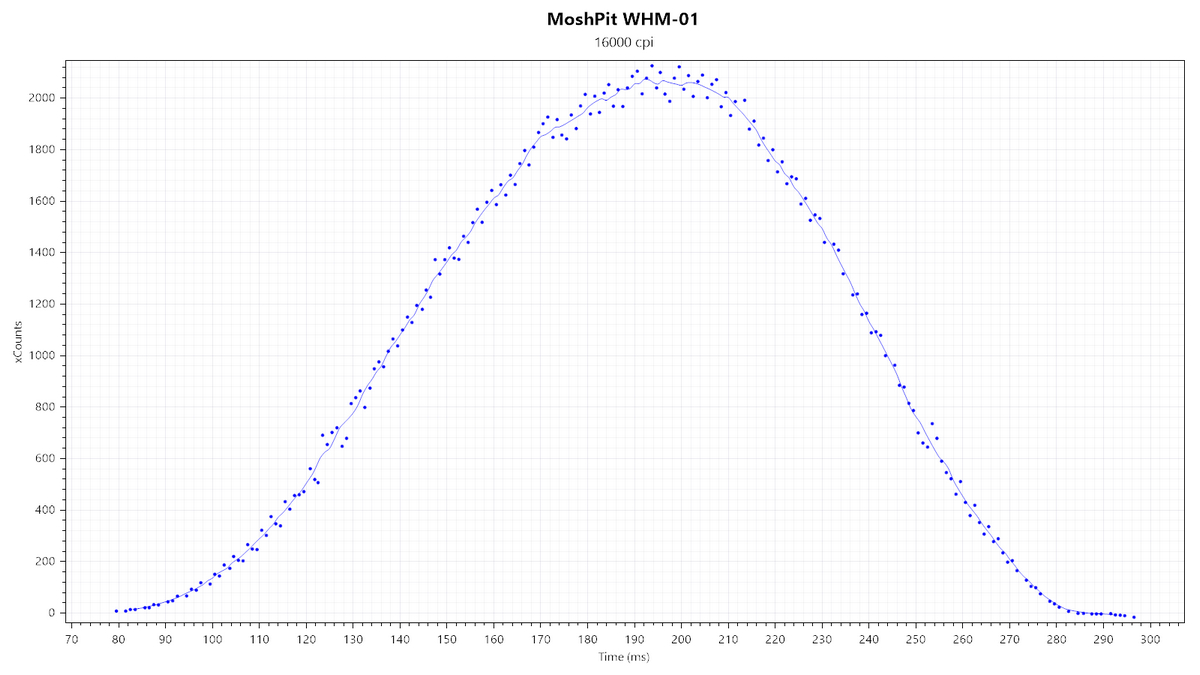
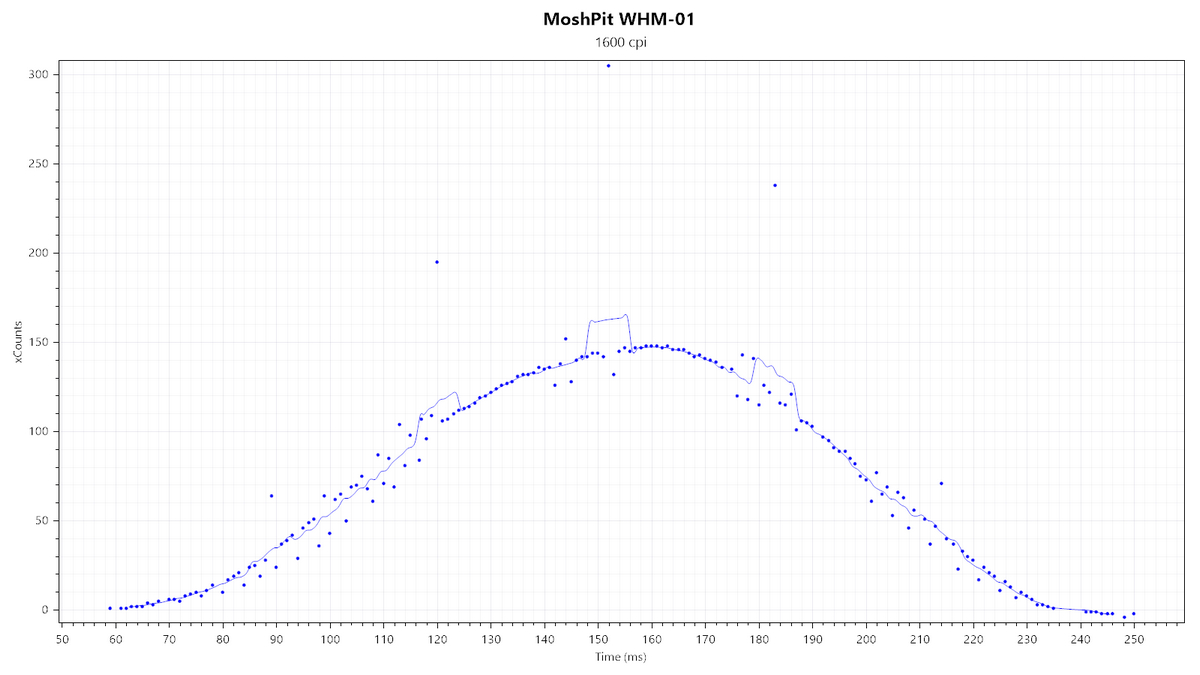
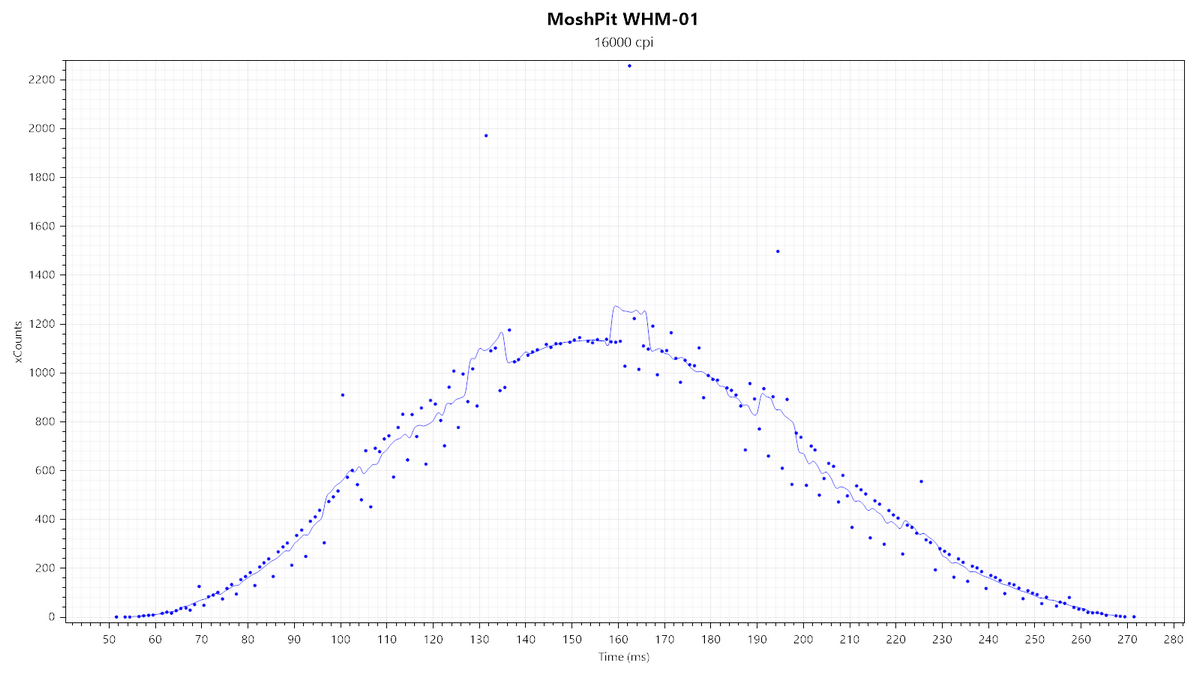
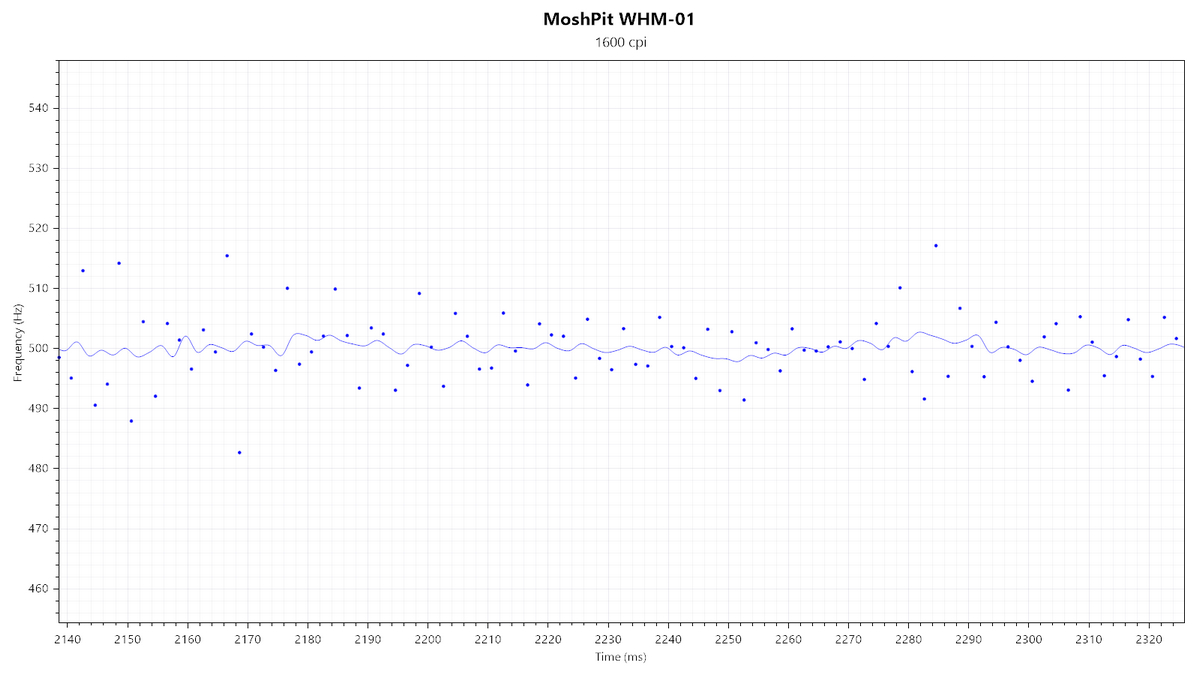
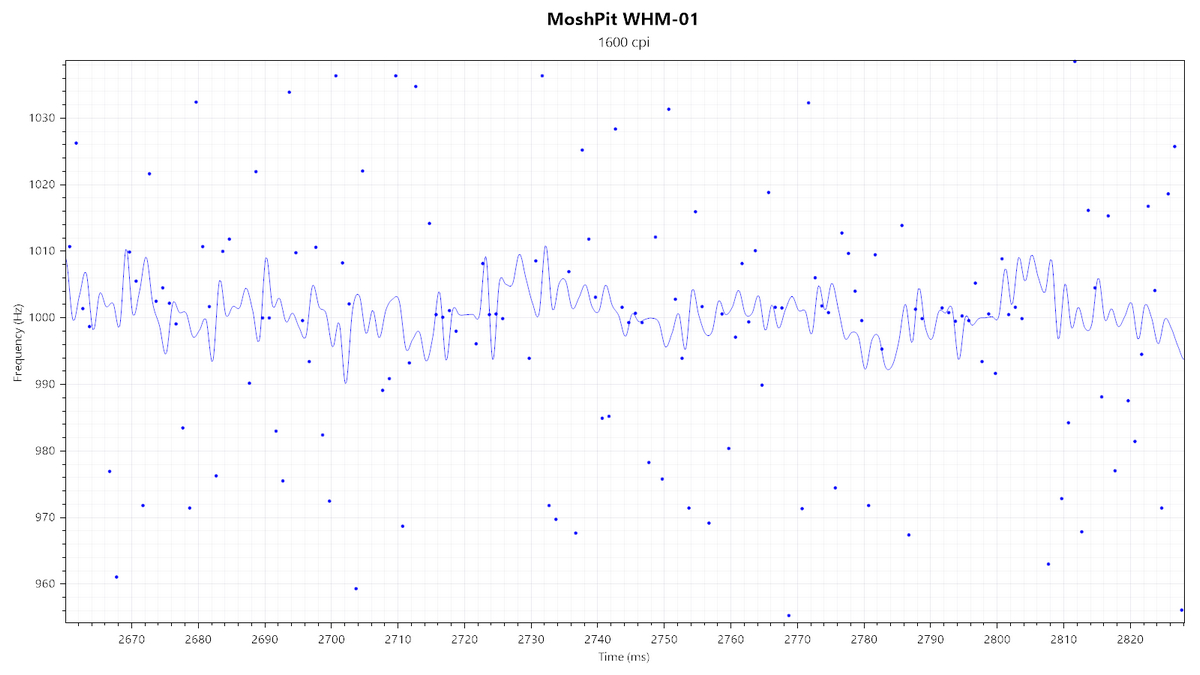
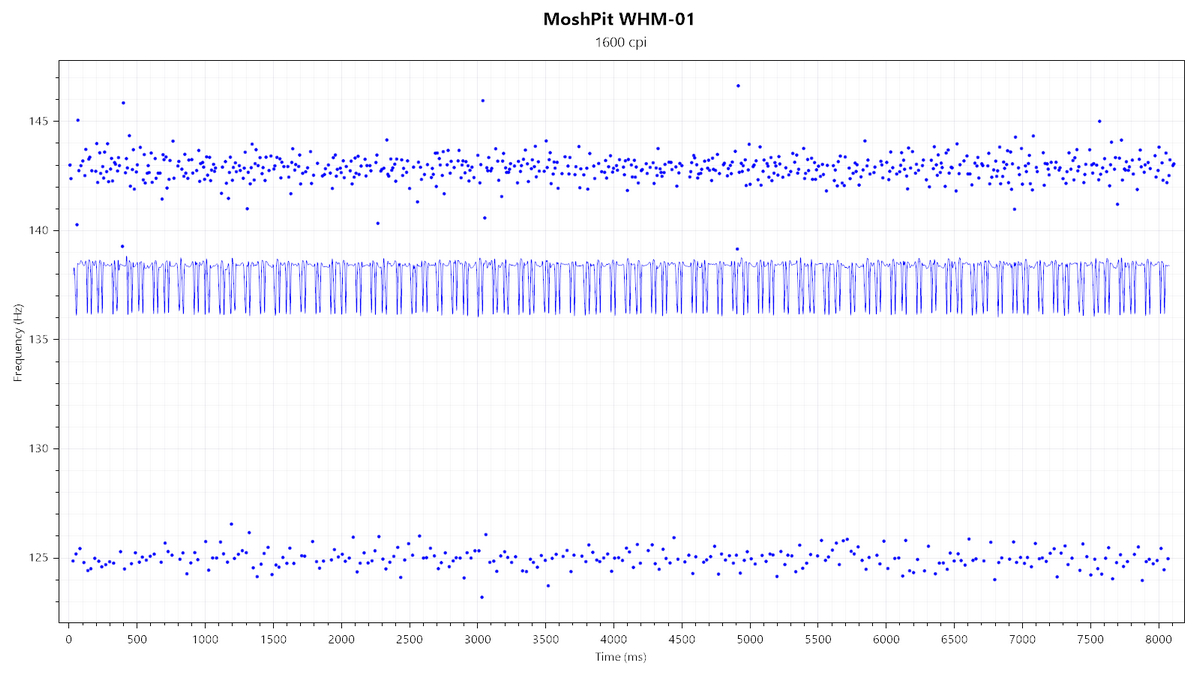
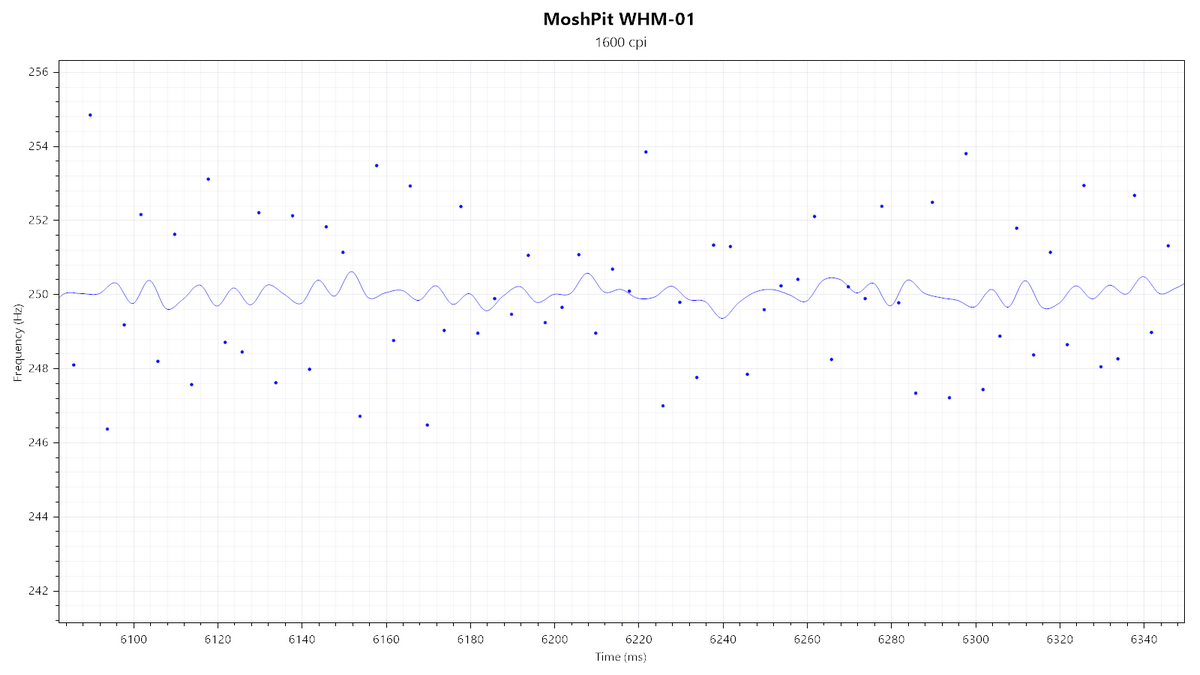
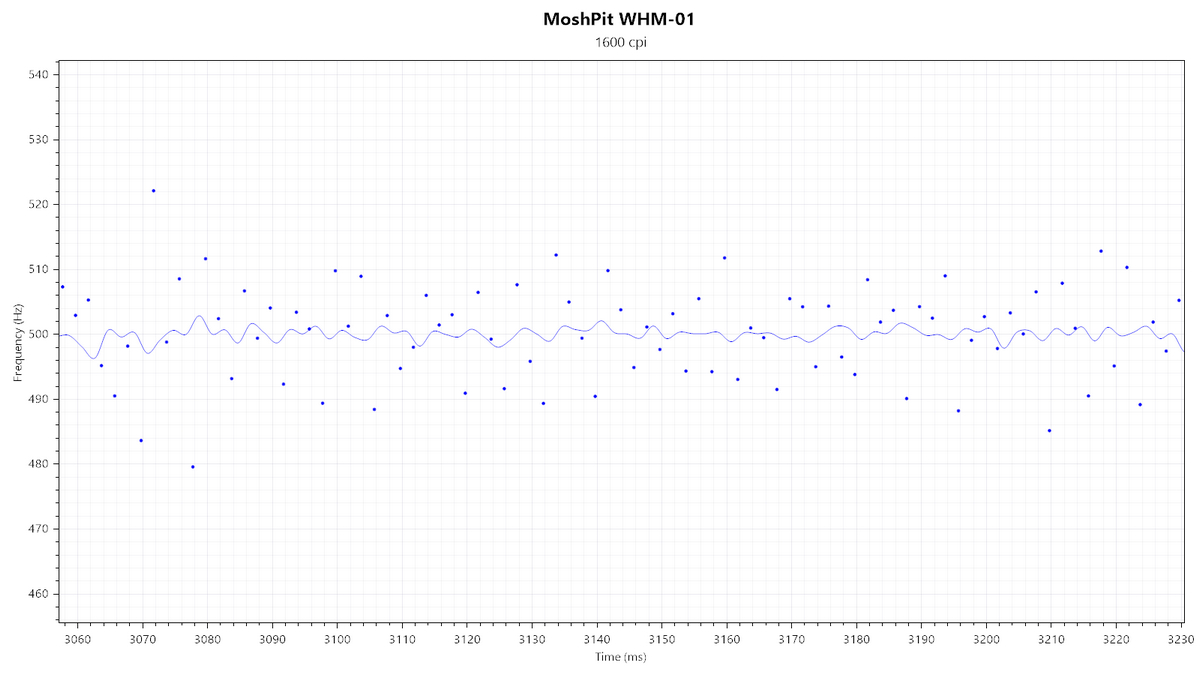
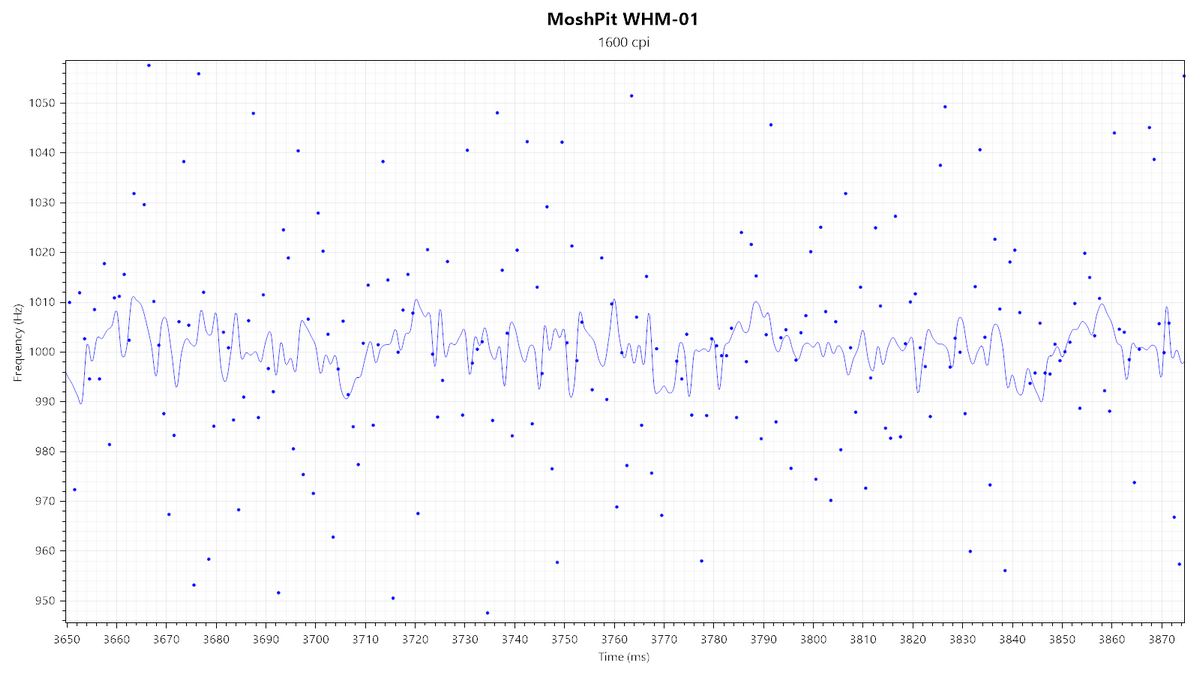
First, I'm looking at two xCounts plots—generated at 1600 and 16,000 CPI—to quickly gauge whether there is any smoothing, which would be indicated by any visible "kinks." As you can see, no such kinks are in sight, which confirms that there is no smoothing across the entire CPI range. We can also see that SPI timing jitter is quite low.
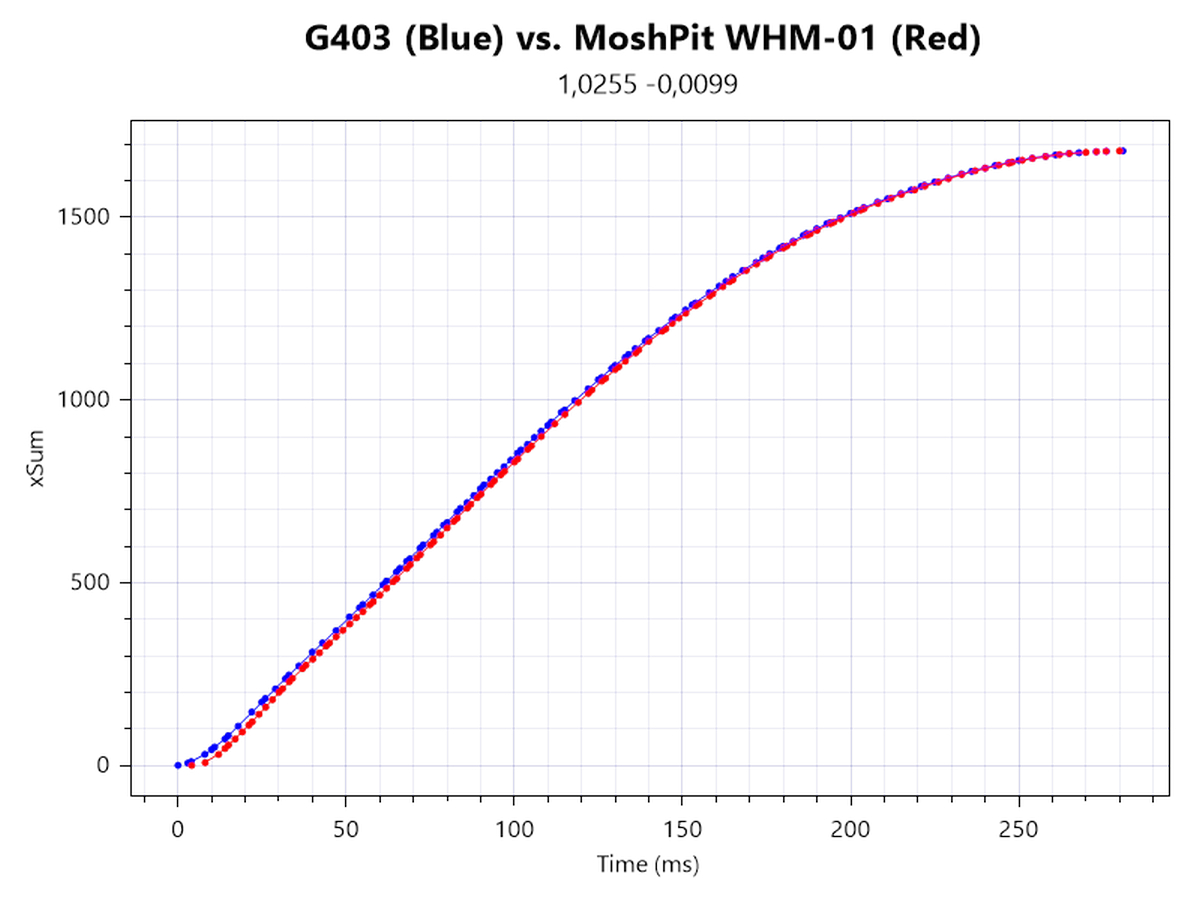
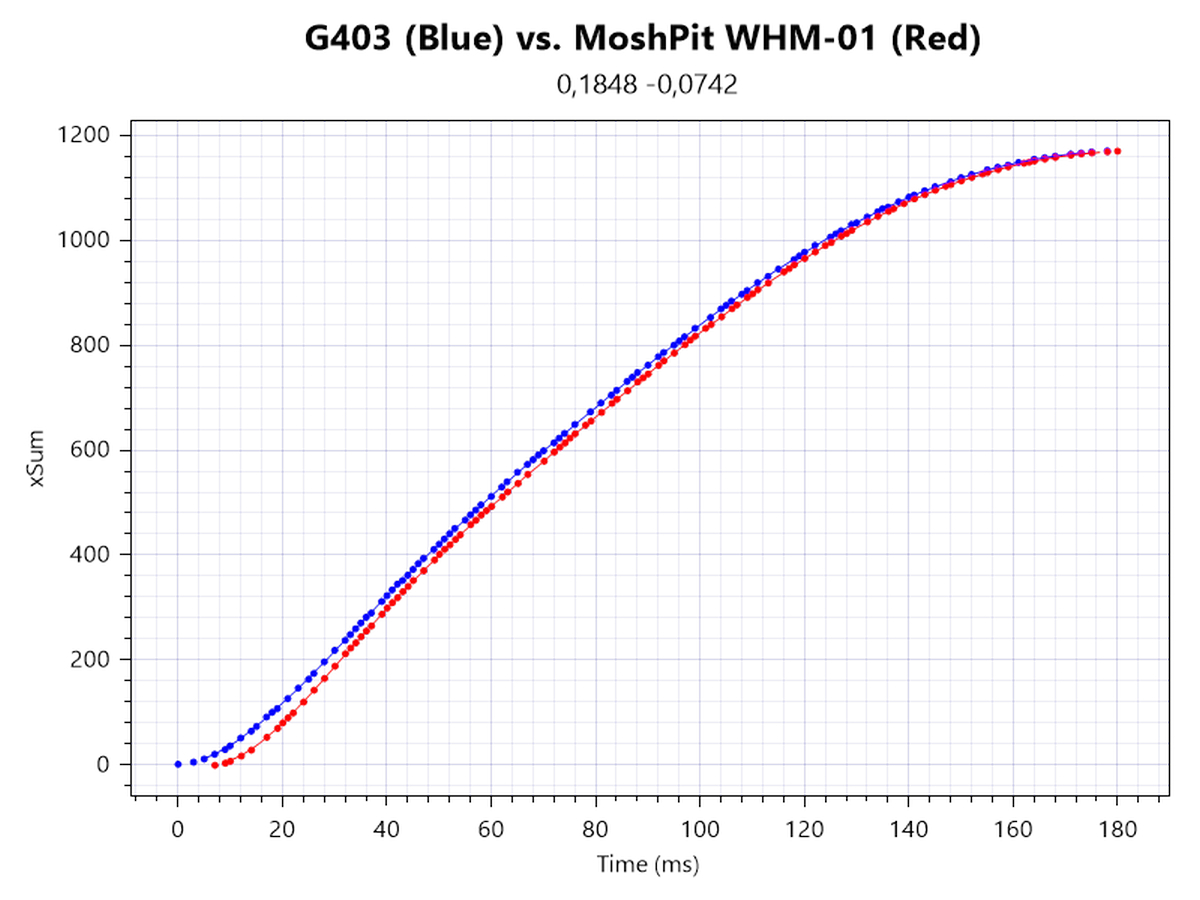
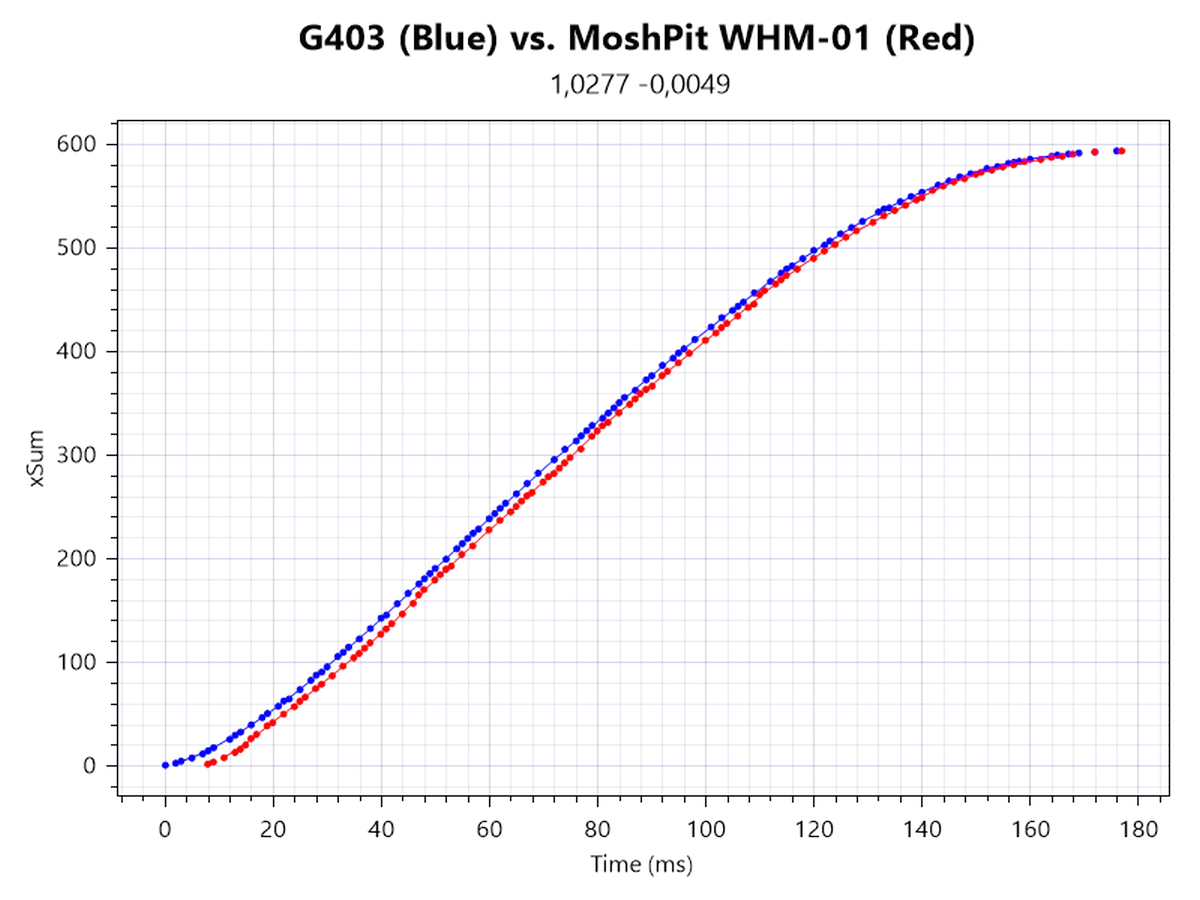
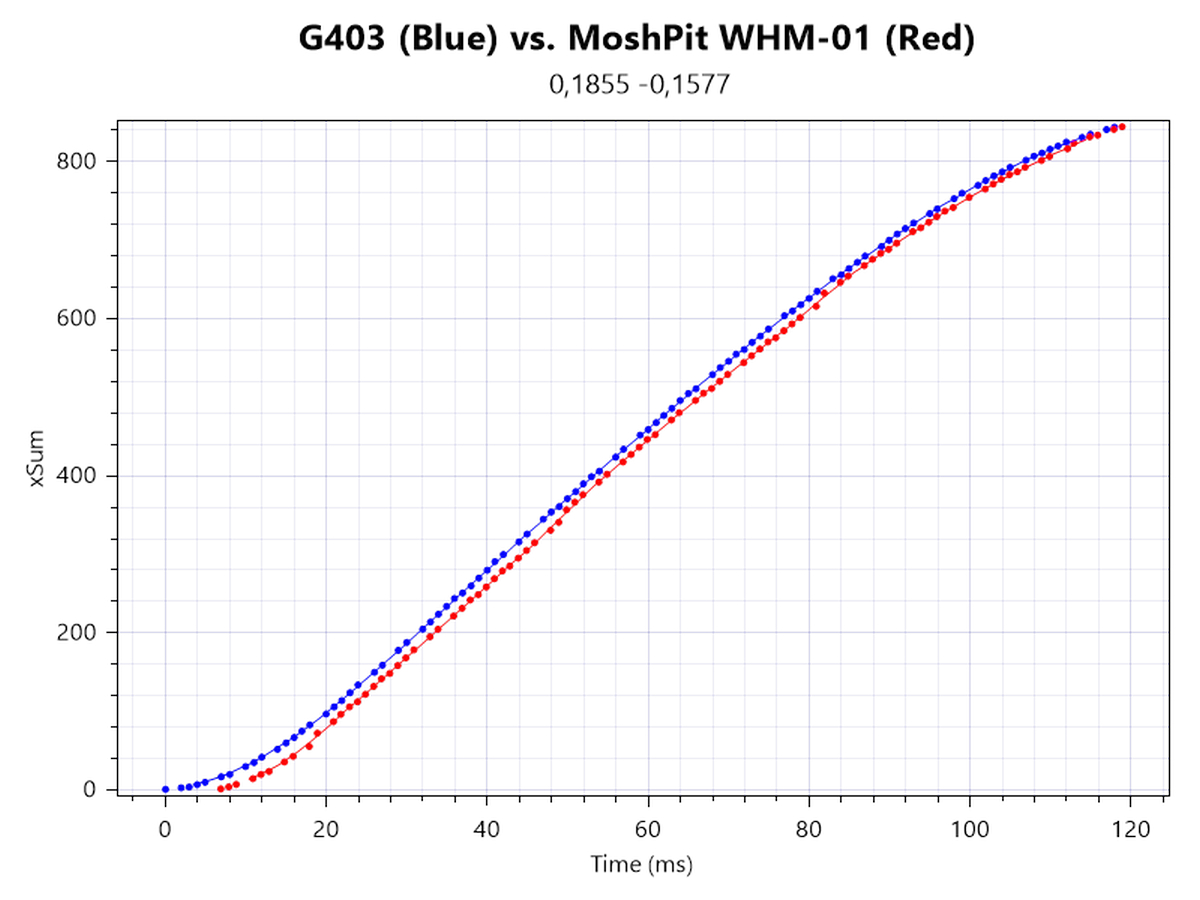
In order to determine motion delay, I'm looking at xSum plots generated at 1600 and 16,000 CPI. The line further to the left denotes the sensor with less motion delay. What can be observed here is behavior I've seen on several other 3335 implementations as well. Basically, latency is greatest upon initiating motion and continually decreases from there until a minimum is reached. At the onset of the plotted motion, the motion delay differential is 4 ms, whereas at the end of it, it is as low as 1 ms. The most truthful way to present this data is by giving a range; i.e., 1–4 ms. This is still the case at 16,000 CPI, as seen in the second plot.
Wireless testing
Aside from occasional outliers, tracking still looks good in wireless mode.
I'm again looking at plots generated at 1600 and 16,000 CPI. Both plots display the same behavior outlined above. Keeping the motion delay differential in wired mode established above in mind, I can measure a wireless delay of roughly 1–1.5 ms.
Speed-related Accuracy Variance (SRAV)
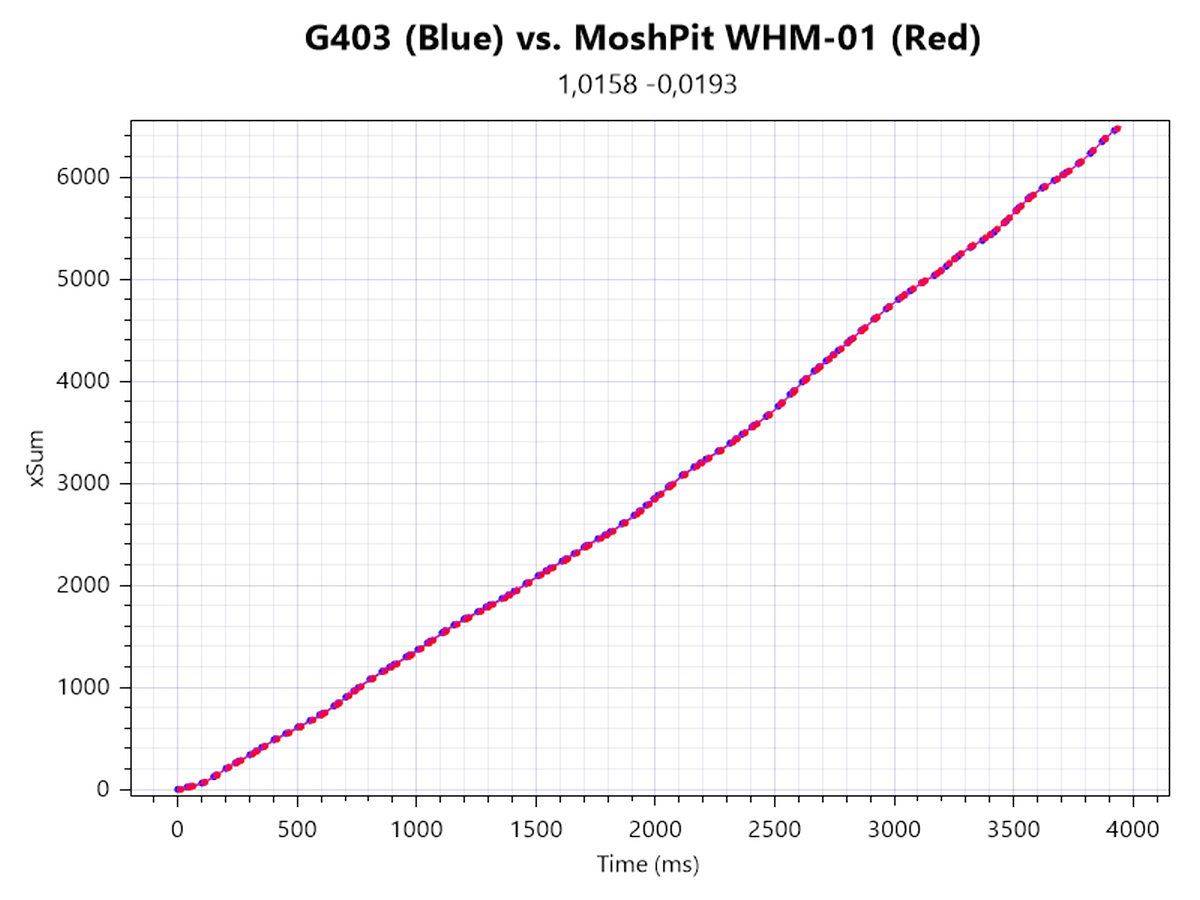
What people typically mean when they talk about "acceleration" is speed-related accuracy variance (or SRAV for short). It's not about the mouse having a set amount of inherent positive or negative acceleration, but about the cursor not traveling the same distance if the mouse is moved the same physical distance at different speeds. The easiest way to test this is by comparison with a control subject that is known to have very low SRAV, which in this case is the G403. As you can see from the plot, no displacement between the two cursor paths can be observed, which confirms that SRAV is very low.
Perfect Control Speed
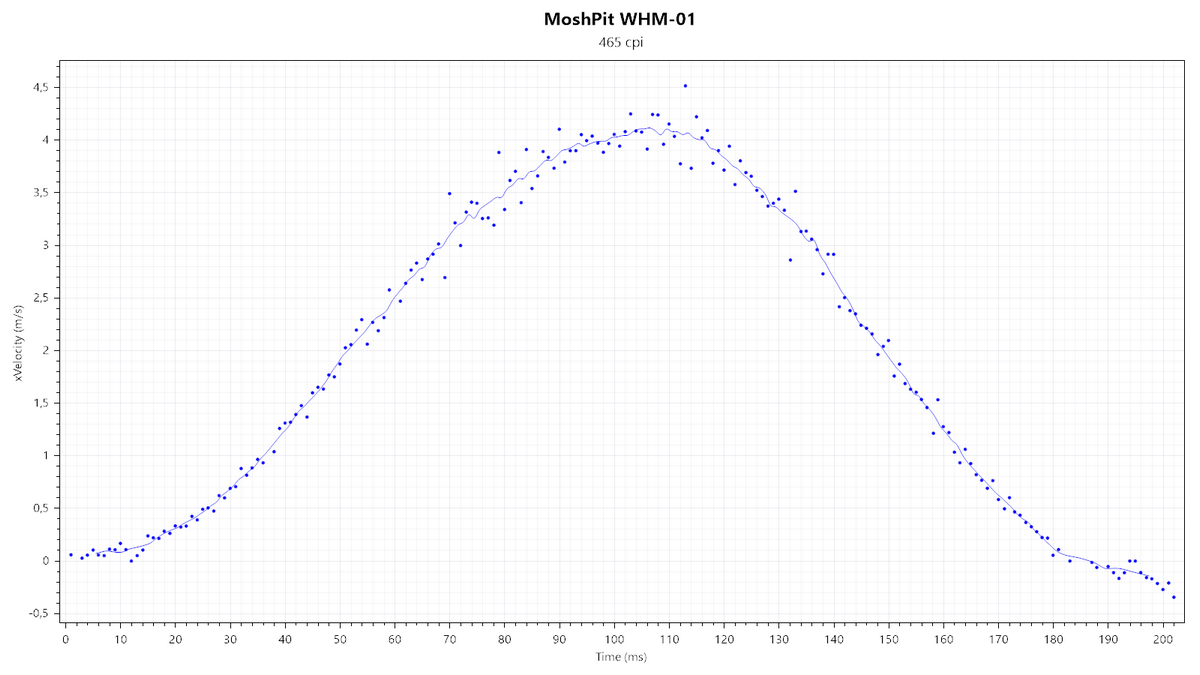
Perfect Control Speed (or PCS for short) is the maximum speed up to which the mouse and its sensor can be moved without the sensor malfunctioning in any way. I've only managed to hit a measly 4.0 m/s (which is within the proclaimed PCS range), at which no sign of the sensor malfunctioning can be observed.
Polling Rate Stability
Considering the MoshPit WHM-01 is usable as a regular wired mouse as well, I'll be testing polling rate stability for both wired and wireless use.Wired testing
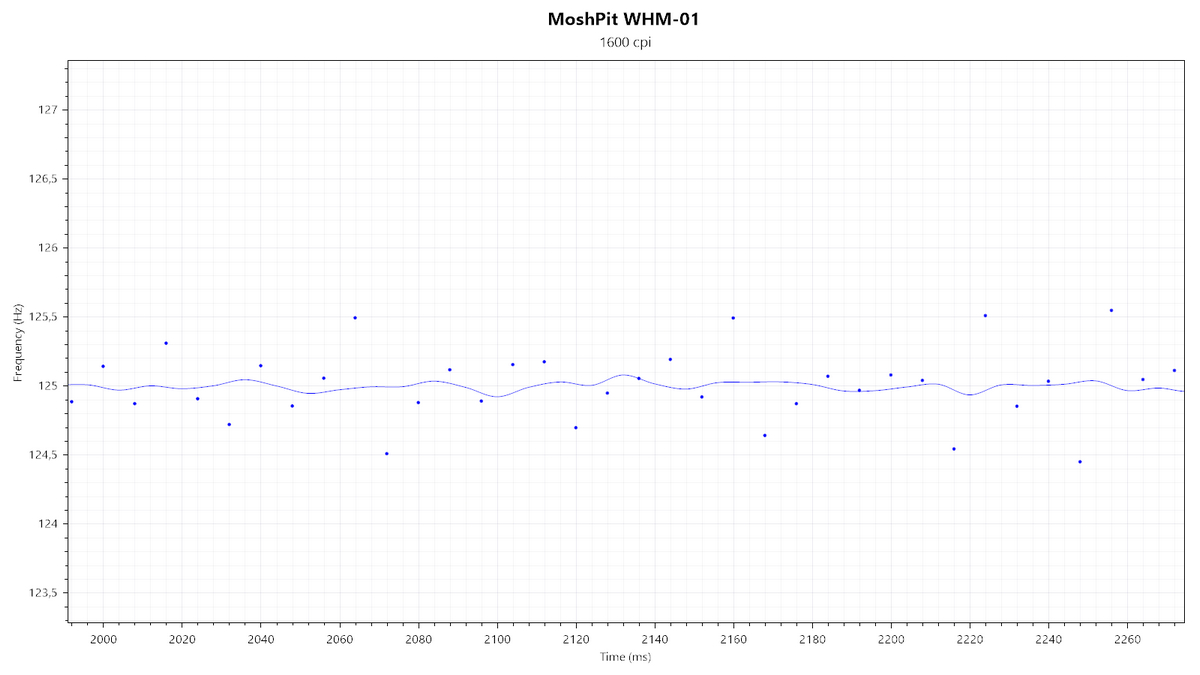
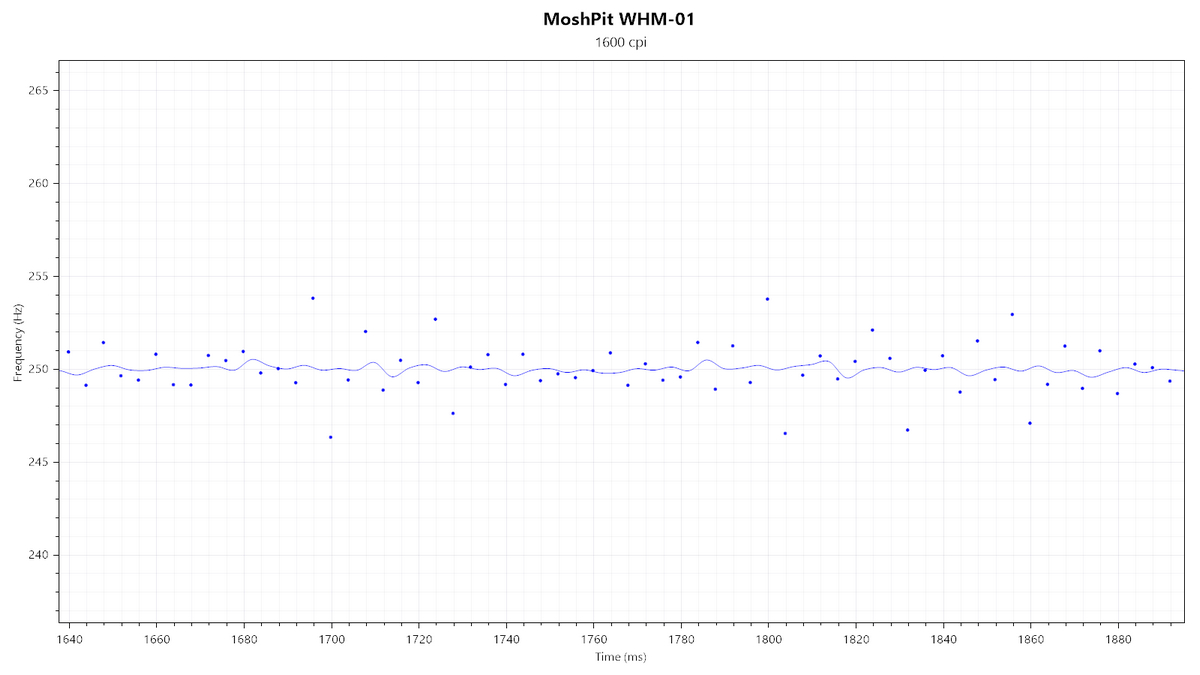
All four of the available polling rates (125/250/500/1000 Hz) look nice and stable. However, polling stability is negatively affected by the Colorful Tail lighting effect:
Wireless testing
For wired mice, polling rate stability merely concerns the wired connection between the mouse (SPI communication) and the USB. For wireless mice, another device that needs to be kept in sync between the first two is added to the mix: the wireless dongle/wireless receiver. I'm unable to measure all stages of the entire end-to-end signal chain individually, so testing polling-rate stability at the endpoint (the USB) has to suffice here.
First, I'm testing whether SPI, wireless, and USB communications are synchronized. Any of these being out of sync would be indicated by at least one 2 ms report, which would be the result of any desynchronization drift accumulated over time. Aside from the odd polling outlier (not pictured), I'm unable to detect periodic off-period polls that would be indicative of a desynchronization drift.
Second, I'm testing the general polling-rate stability of the individual polling rates in wireless mode. Running the MoshPit WHM-01 at a lower polling rate can have the benefit of extending battery life. As you can see, all polling rates but 125 Hz look nice and stable. Curiously, I was unable to reproduce the polling instability observed when choosing the Colorful Tail lighting effect in wired mode.
Paint Test
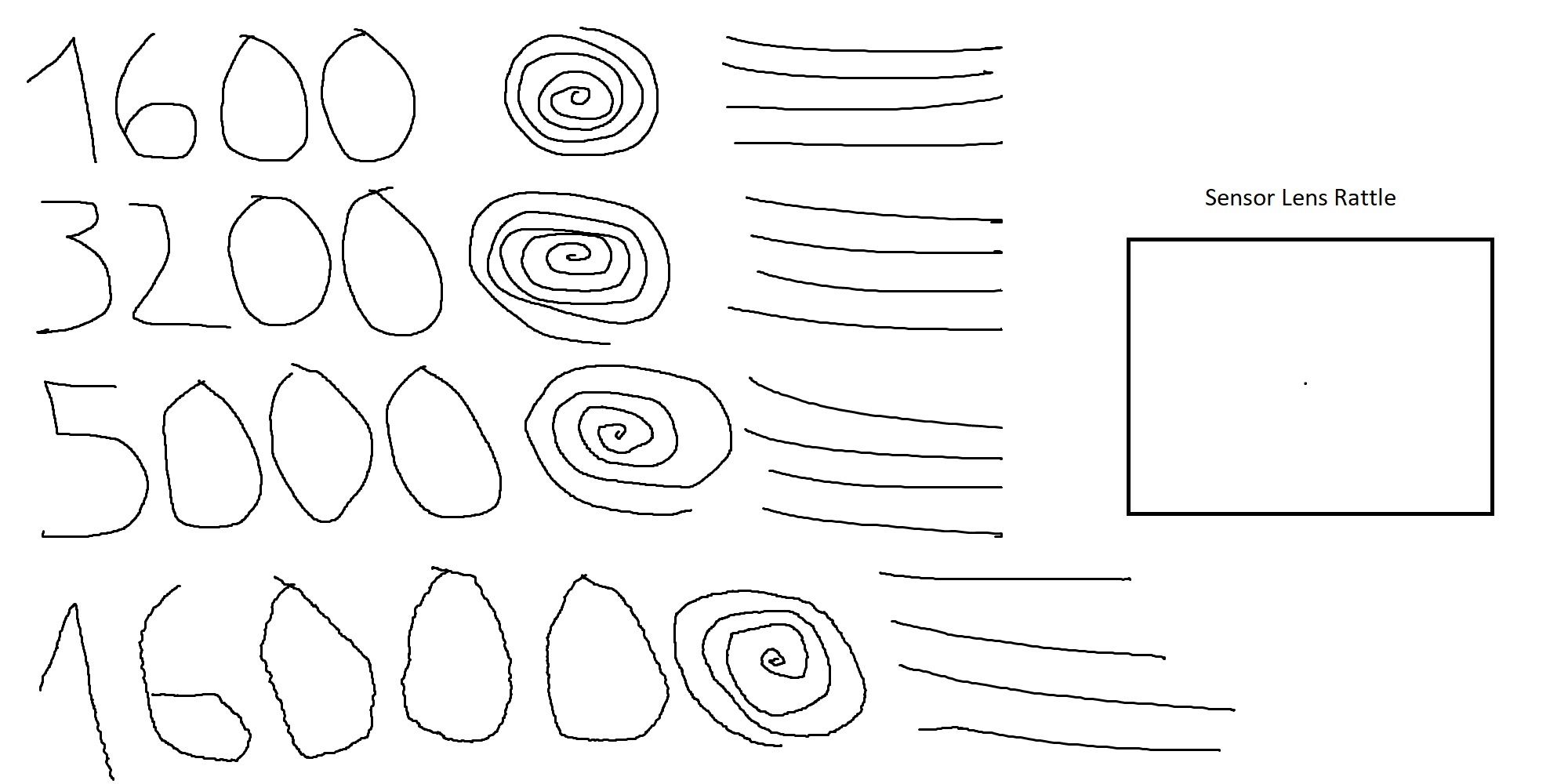
This test is used to indicate any potential issues with angle snapping (non-native straightening of linear motion) and jitter, along with any sensor lens rattle. As you can see, no issues with angle snapping can be observed. No jitter is visible at 1600 CPI or 3200 CPI, whereas 5000 CPI shows minor jitter. Finally, jitter is high but not excessive at 16,000 CPI. Lastly, there is no sensor lens rattle.
Lift-off Distance
The MoshPit WHM-01 does not support adjusting LOD. This is unfortunate as the 3335 would be fully capable of it. At the only available (default) setting, the sensor does track at a height of 1 DVD, but not at a height of 2 DVDs (1.2<x<2.4 mm, x being LOD height). Keep in mind that LOD may vary slightly depending on the mousing surface (pad) it is being used on.Click Latency

Since mechanical switches are being used for the buttons in most computer mice, debouncing is required in order to avoid unintended double clicks. Debouncing typically adds a delay (along with any potential processing delay), which shall be referred to as click latency. As there is no way to measure said delay directly, it has to be done by comparing it to a control subject, which in this case is the Logitech G203. In wired mode, click latency has been measured to be roughly +16.2 ms when compared to the SteelSeries Ikari, which is considered as the baseline with 0 ms. Coupled with the measured wireless delay of roughly 1–1.5 ms, click latency in wireless sits at roughly +17.5 ms. Please keep in mind that the measured value is not the absolute click latency. Comparison data comes from this thread as well as my own testing, using qsxcv's program.
The main button switches were measured to be running at 3.29 V. Since the logic is running at 3.3 V, I believe these switches to be running within specifications.
Jan 8th, 2025 16:55 EST
change timezone
Latest GPU Drivers
New Forum Posts
- NVIDIA has revealed the prices for the RTX 5090, 5080 and 5070 (150)
- TPU's Rosetta Milestones and Daily Pie Thread (2144)
- AMD Phenom II X6 1090T - Upgrade AM4 / AM5 / Intel Advice - Keep the 1080ti. (29)
- Will TS work for my Intel Core i7-13620H 13th Gen? (14)
- MSI RX580 8g ARMOR OC (18)
- Nvidia drivers versus AMD drivers on Wayland (21)
- TPU's Nostalgic Hardware Club (19755)
- What are you playing? (22539)
- Prediction about RTX 5000 Series (52)
- Current ram setup for i5 CPU (10)
Popular Reviews
- ASUS ROG Strix B850-F Gaming WiFi Review
- DDR5 Thermal Testing & Analysis
- AMD Ryzen 7 9800X3D Review - The Best Gaming Processor
- SCYROX V8 Review
- Klevv Genuine G560 2 TB Review
- GPU Test System Update for 2025
- Intel Arc B580 Review - Excellent Value
- Upcoming Hardware Launches 2024 (Updated Nov 2024)
- STALKER 2 Performance Benchmark Review - 35 GPUs Tested
- Call of Duty: Black Ops 6 Performance Benchmark Review - AMD FTW
Controversial News Posts
- NVIDIA 2025 International CES Keynote: Liveblog (427)
- AMD Debuts Radeon RX 9070 XT and RX 9070 Powered by RDNA 4, and FSR 4 (318)
- NVIDIA GeForce RTX 5090 Features 575 W TDP, RTX 5080 Carries 360 W TDP (208)
- AMD Radeon RX 9070 XT Alleged Benchmark Leaks, Underwhelming Performance (204)
- Potential RTX 5090 and RTX 5080 Pricing in China Leaks (173)
- 32 GB NVIDIA RTX 5090 To Lead the Charge As 5060 Ti Gets 16 GB Upgrade and 5060 Still Stuck With Last-Gen VRAM Spec (173)
- AMD Radeon RX 9070 XT Boosts up to 3.10 GHz, Board Power Can Reach up to 330W (167)
- NVIDIA GeForce RTX 5070 Ti Leak Tips More VRAM, Cores, and Power Draw (161)