 7
7
G-Wolves Hati-R 8K Review
Testing 8000 Hz Wireless »Sensor and Performance
The G-Wolves Hati-R 8K is equipped with the PixArt PAW3395. According to specifications, the 3395 is capable of up to 26,000 CPI, as well as a maximum tracking speed of 650 IPS, which equals 16.51 m/s. Out of the box, four pre-defined CPI steps are available: 400, 800, 1600, and 3200.All testing was done on the latest stable firmware (00.00.17). As such, results obtained on earlier firmware versions may differ from those presented hereafter.
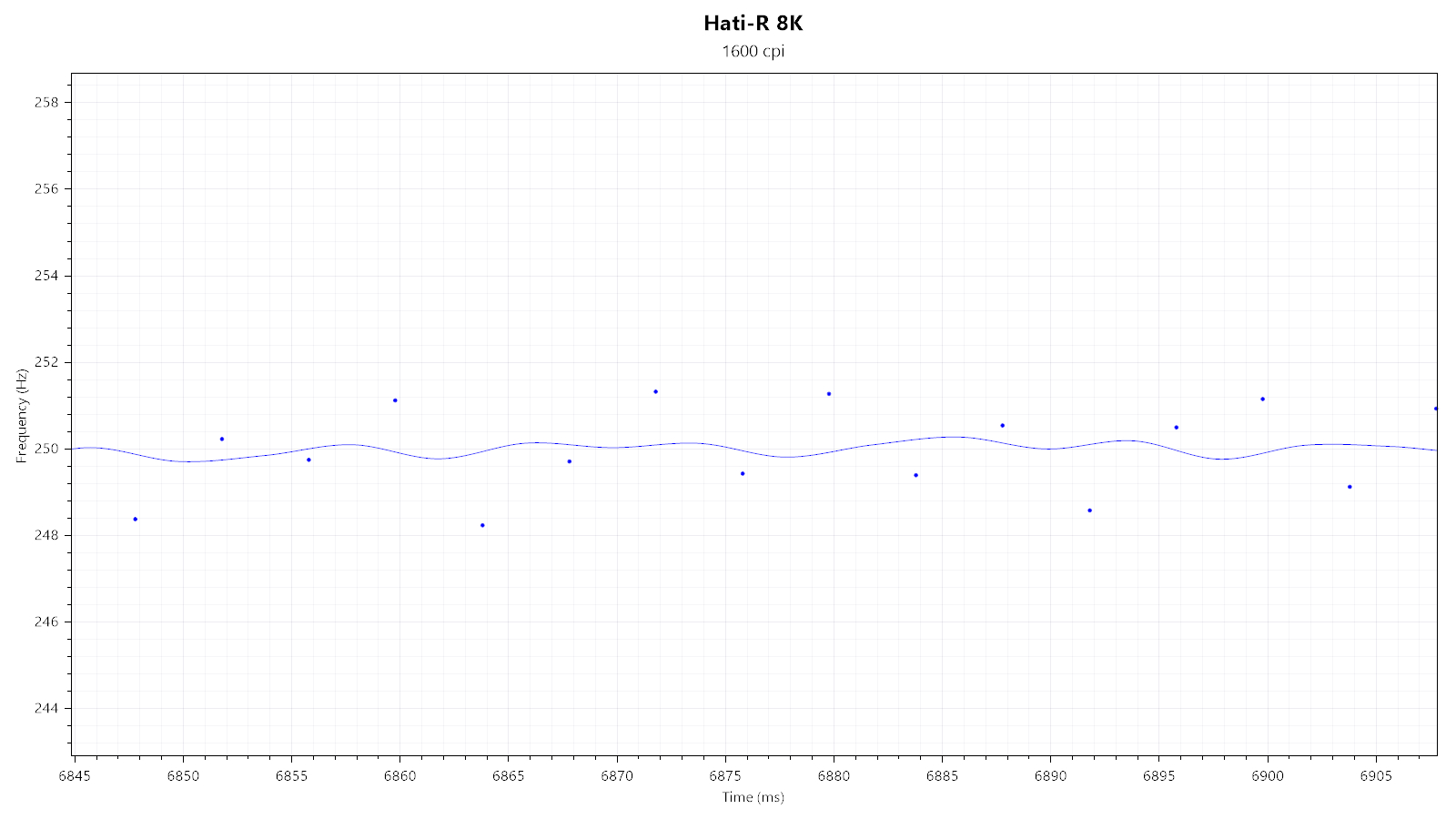
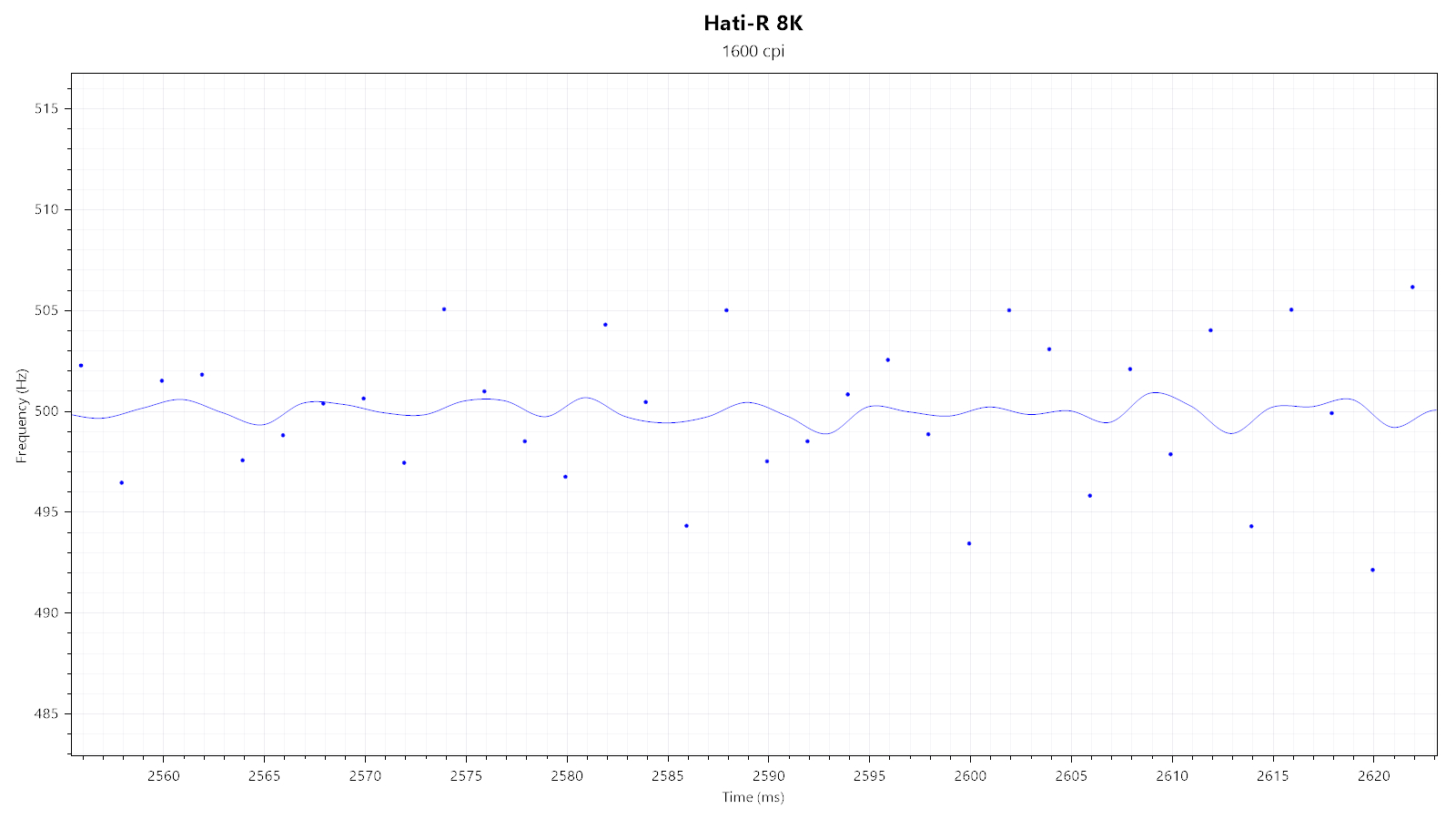
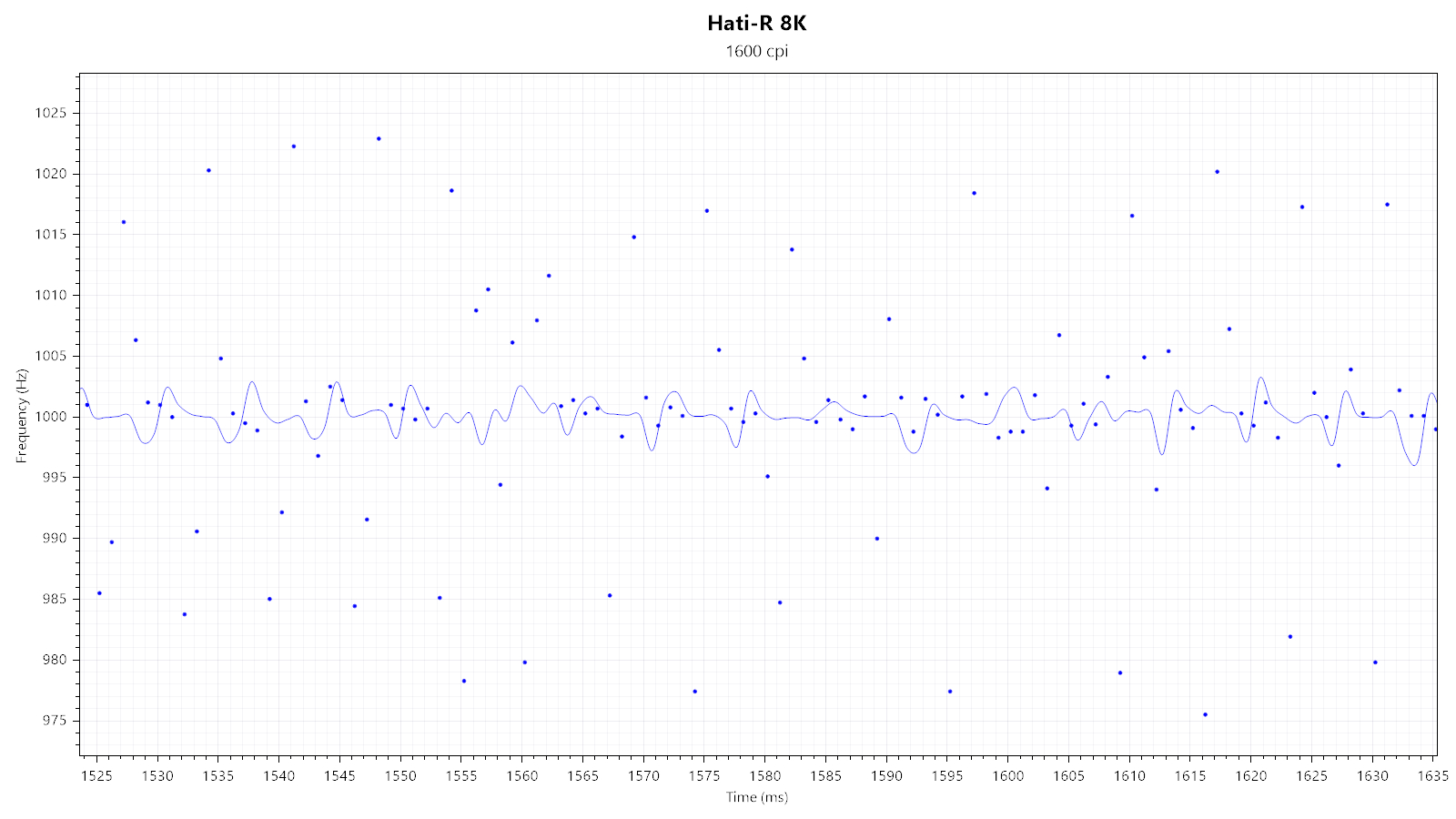
CPI Accuracy

I've restricted my testing to the four most common CPI steps, which are 400, 800, 1600, and 3200. As you can see, there is no deviation at all, which is a perfect result.
Motion Delay
Wired testing
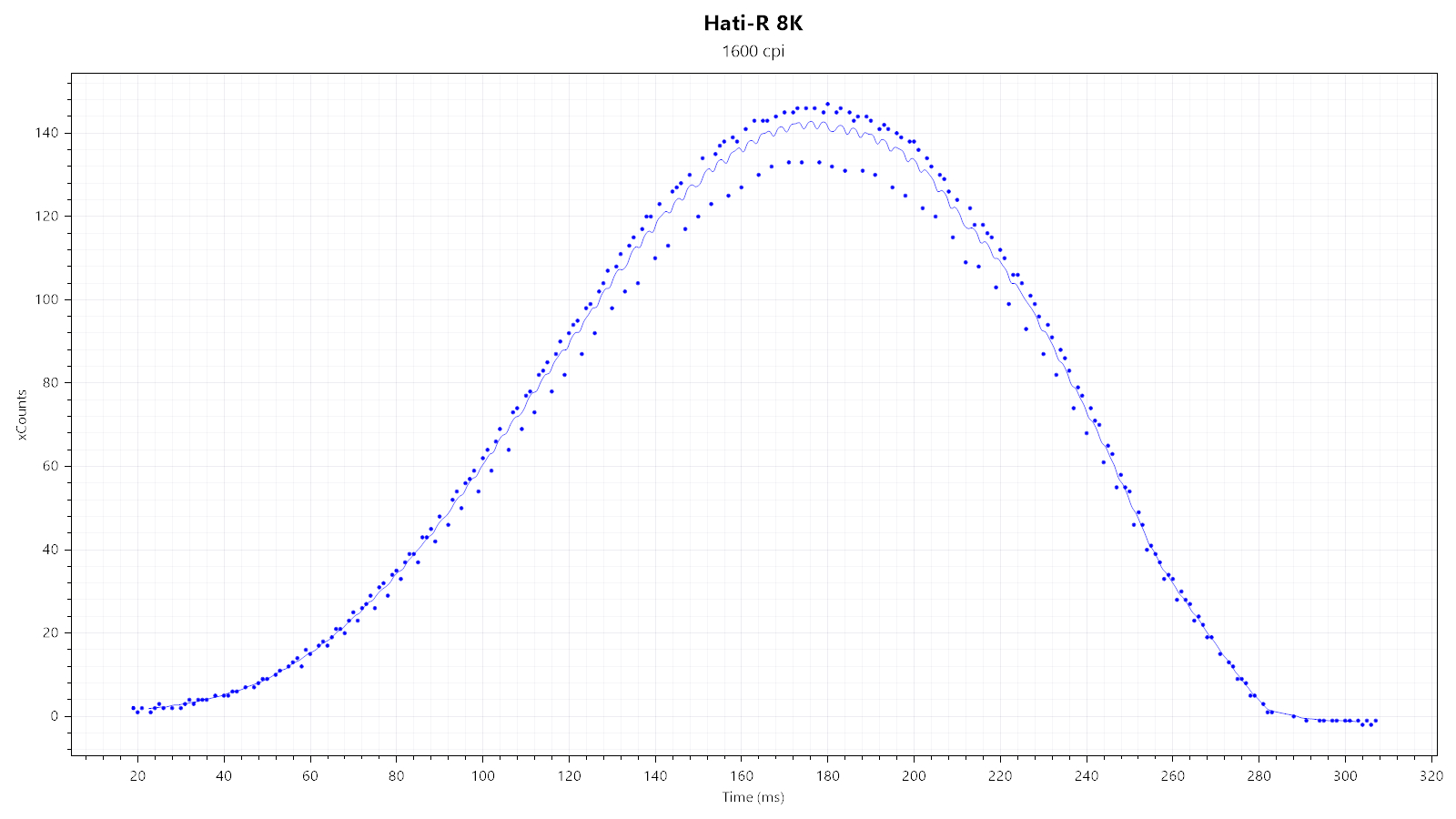
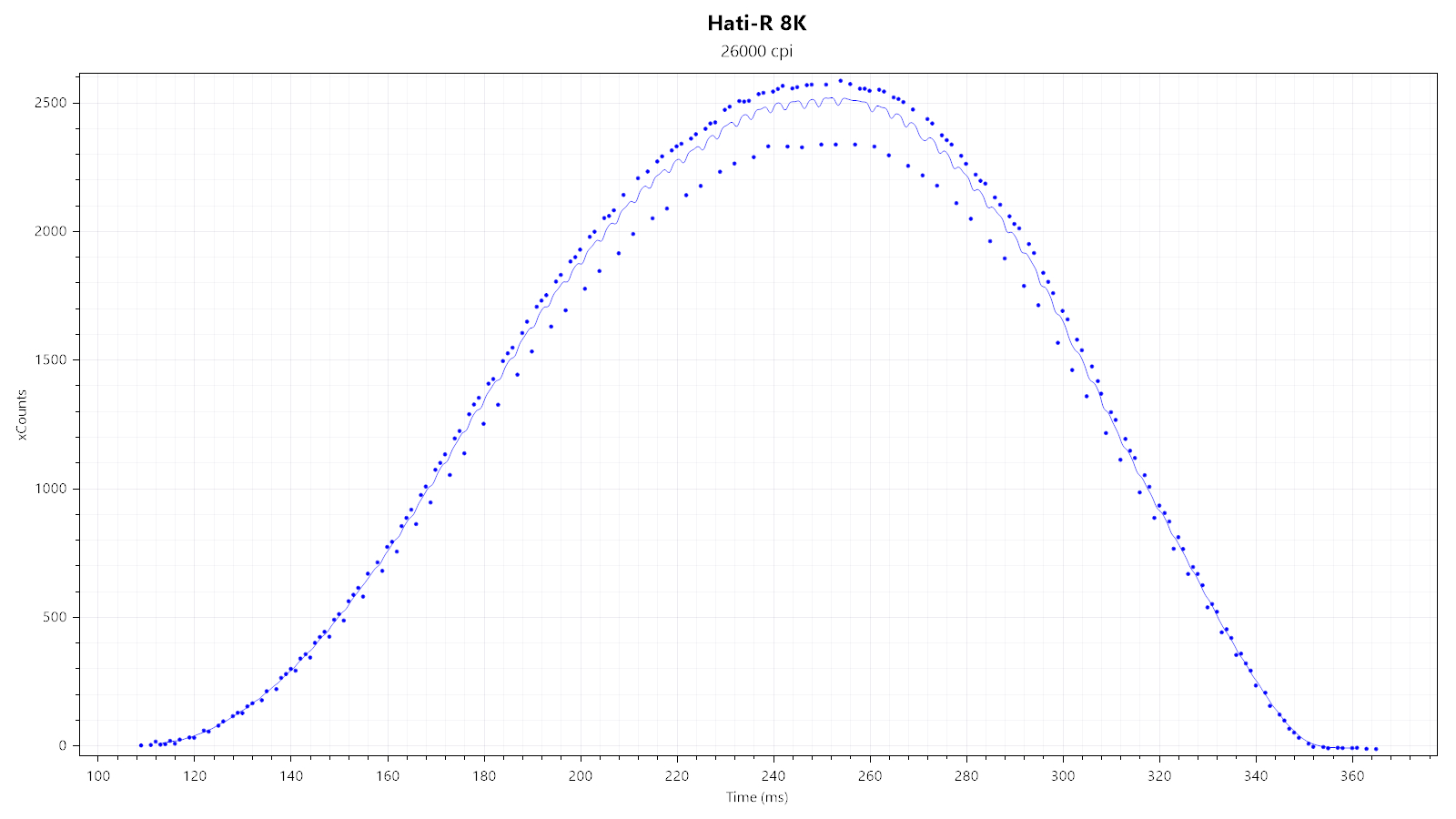
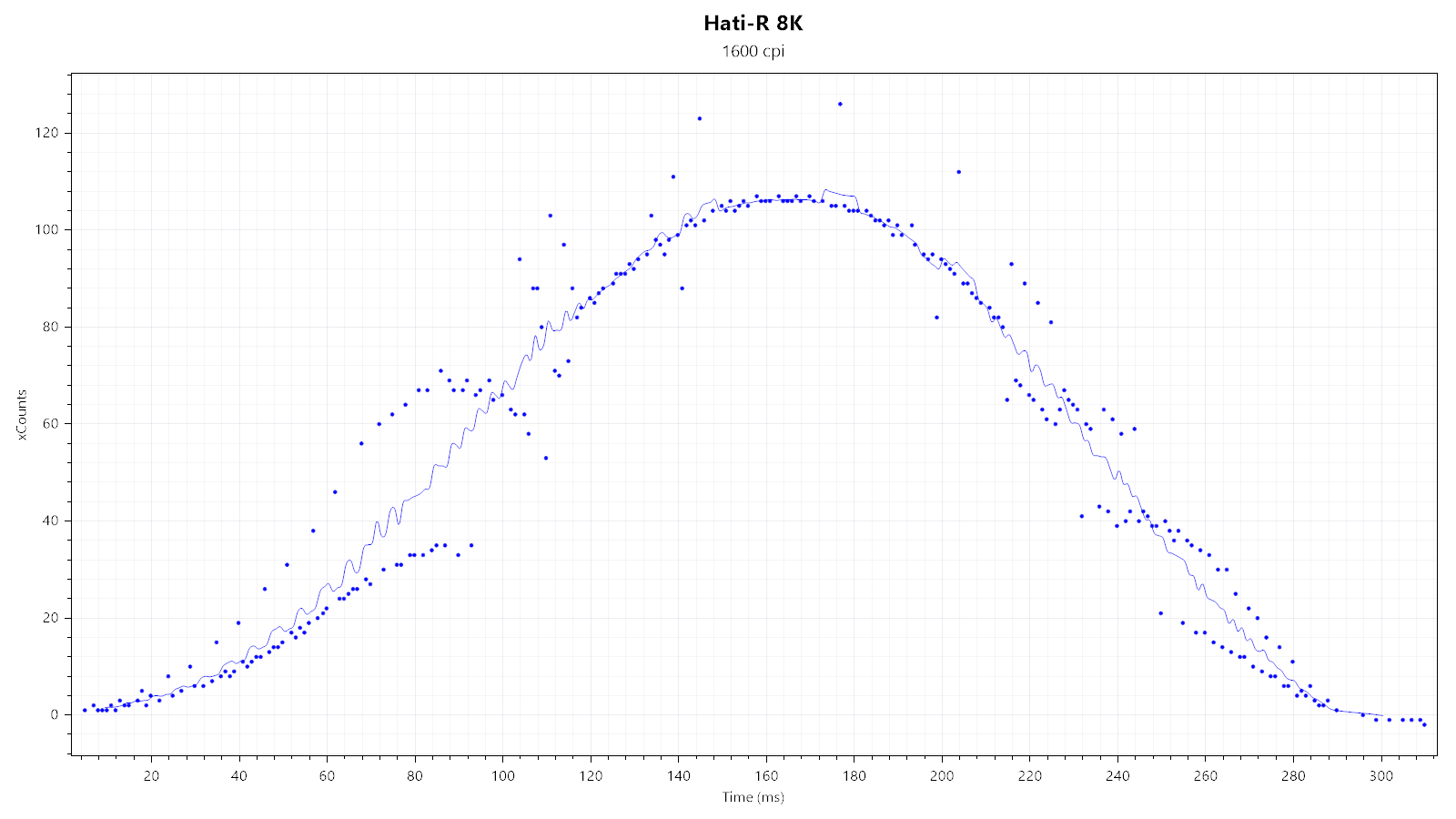
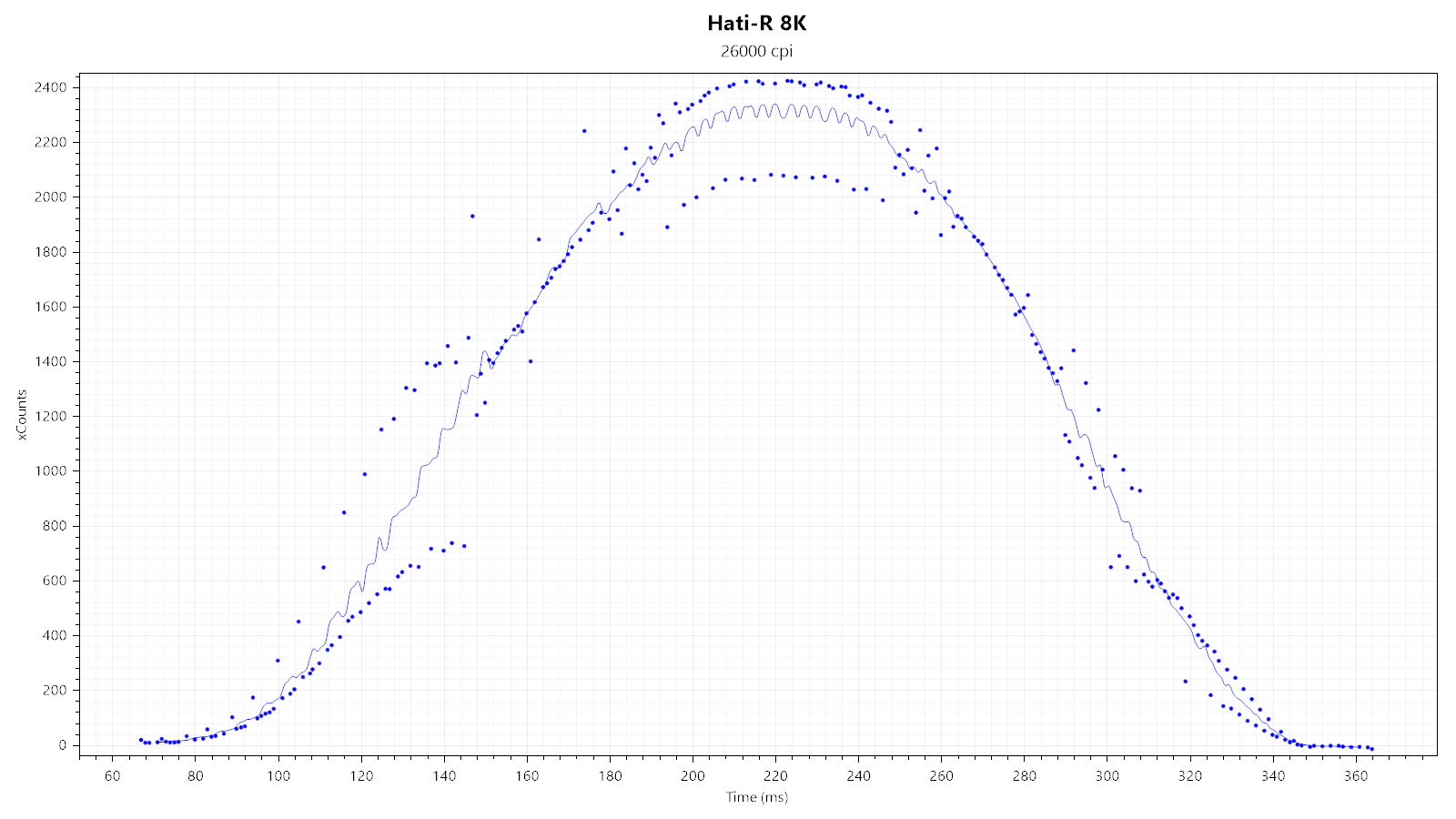
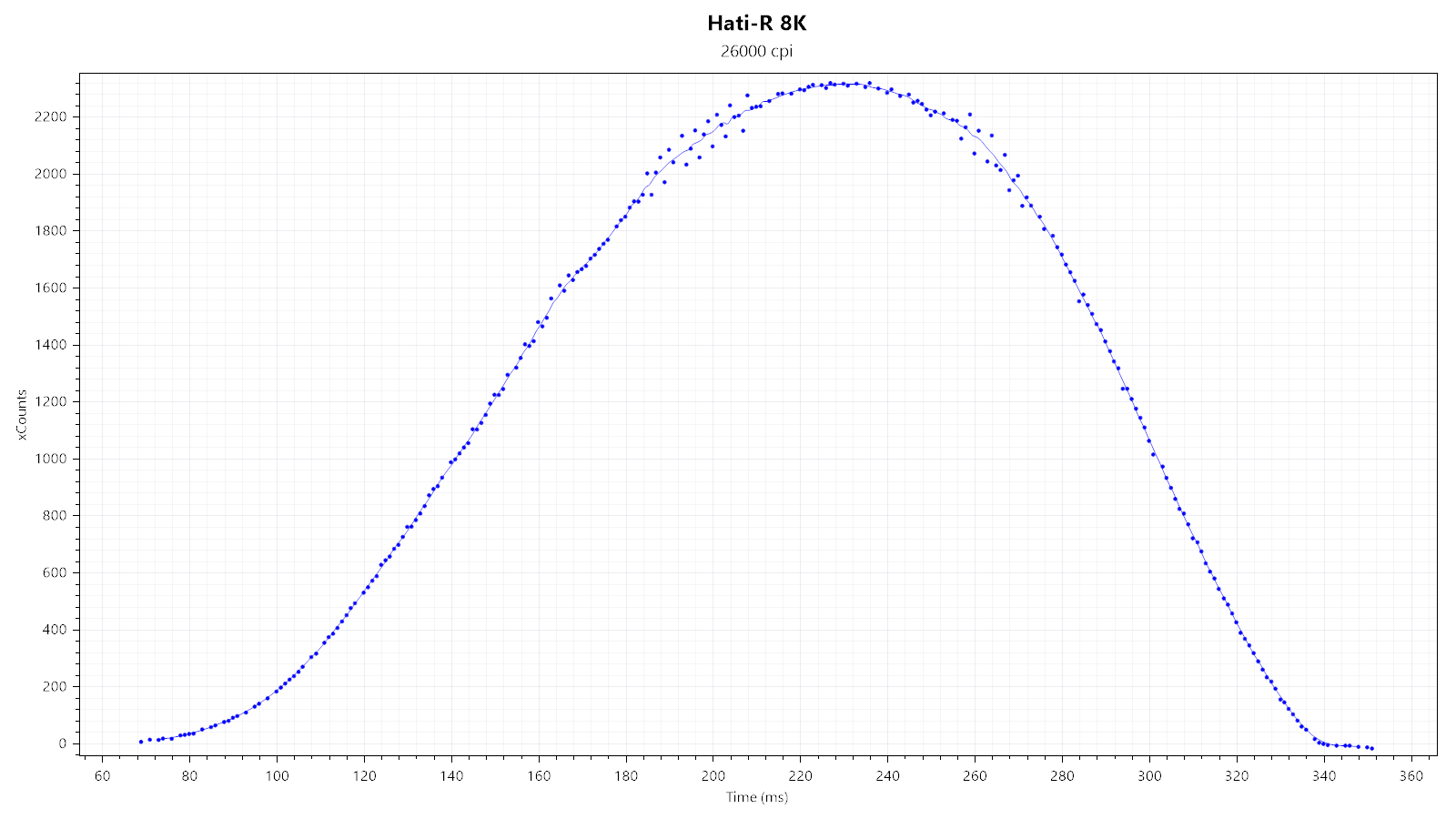
First, I'm looking at two xCounts plots—generated at 1600 and 26,000 CPI—to quickly gauge whether there is any smoothing, which would be indicated by any visible "kinks." Neither plot shows any kinks, strongly suggesting there not being any smoothing across the entire CPI range.


The Hati-R 8K also allows enabling MotionSync, which effectively synchronizes SPI reads with USB polls, resulting in low SPI timing jitter as seen above.
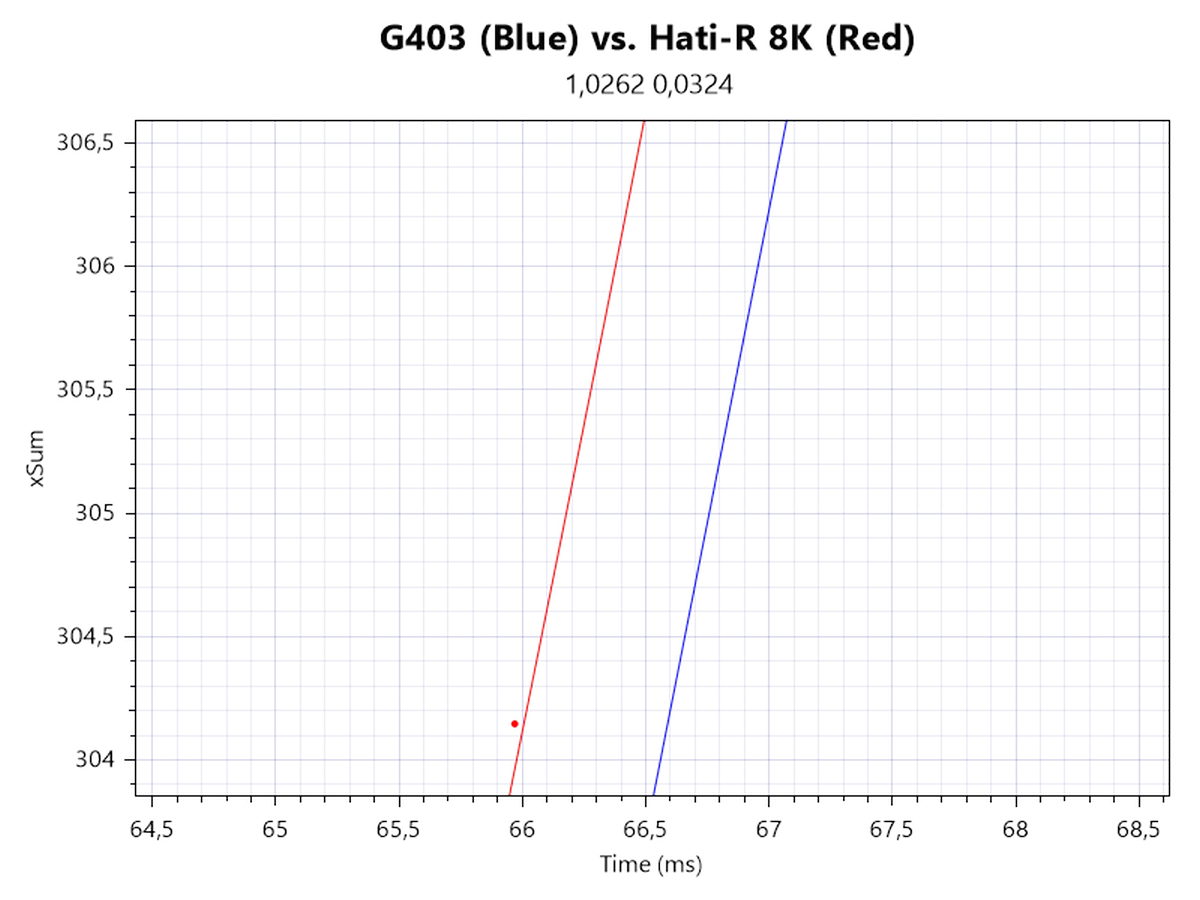
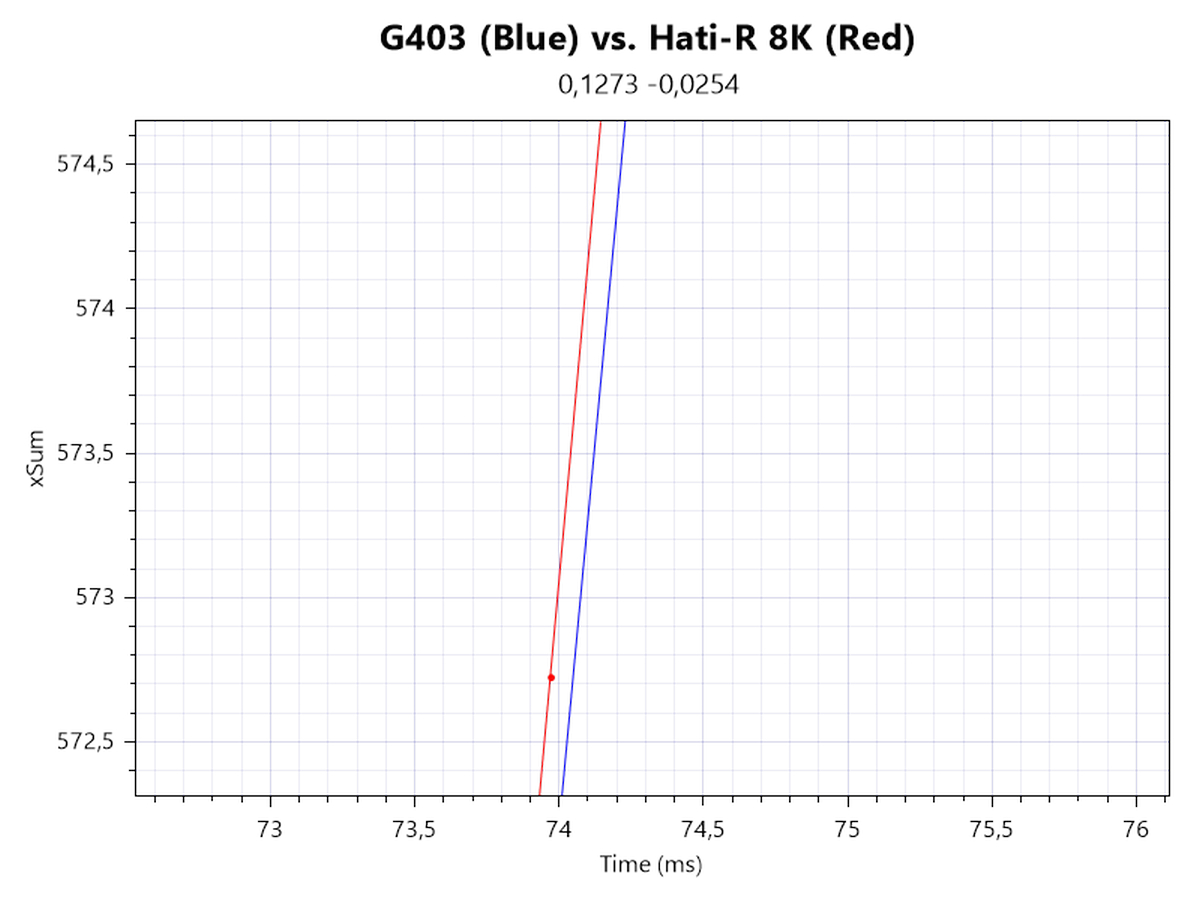
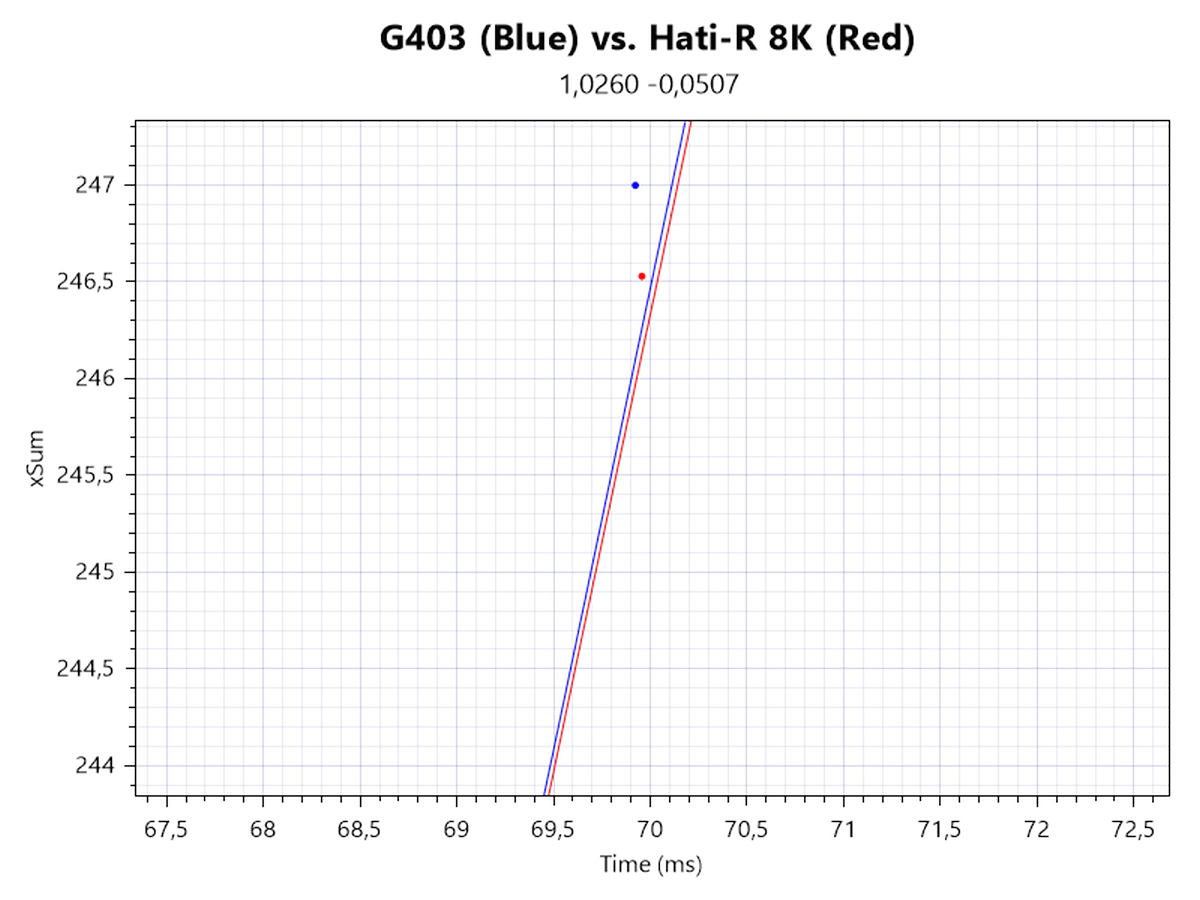
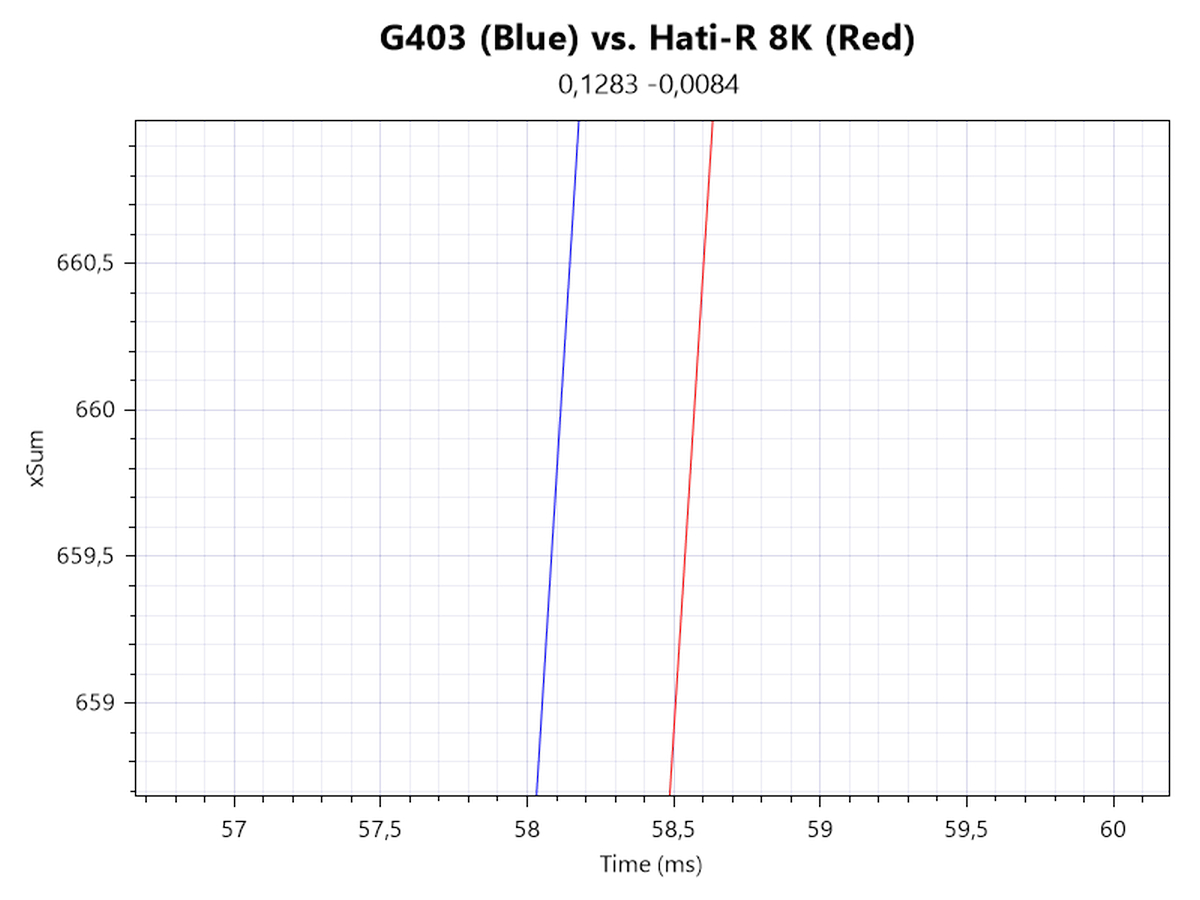
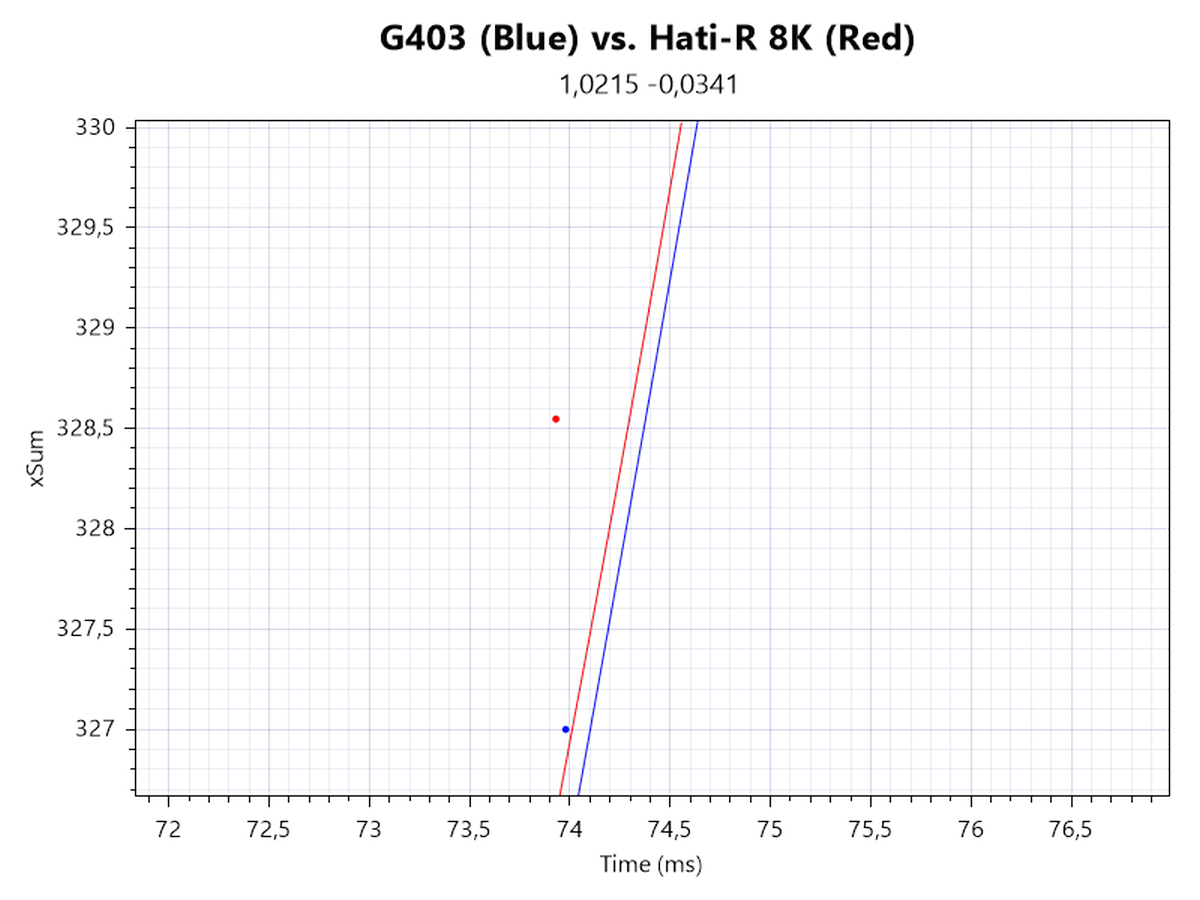
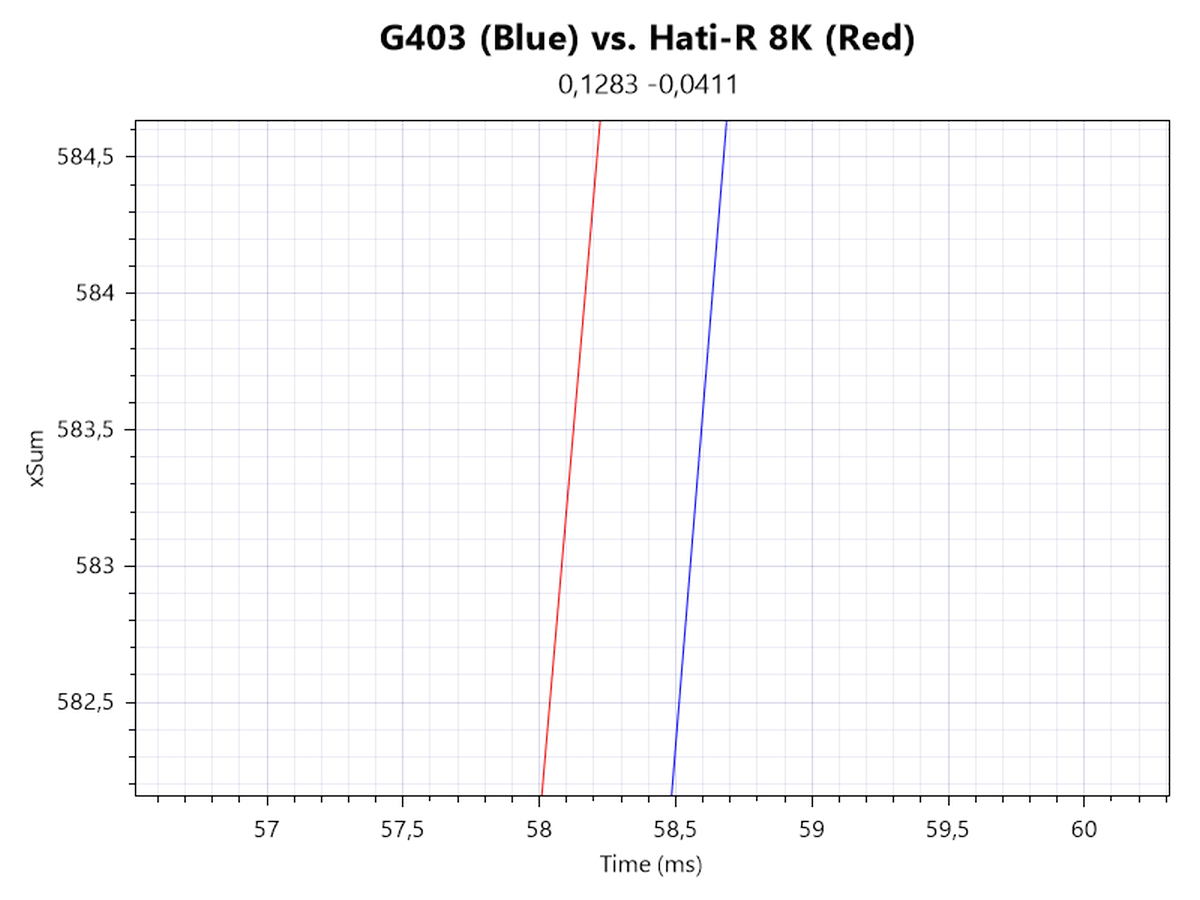
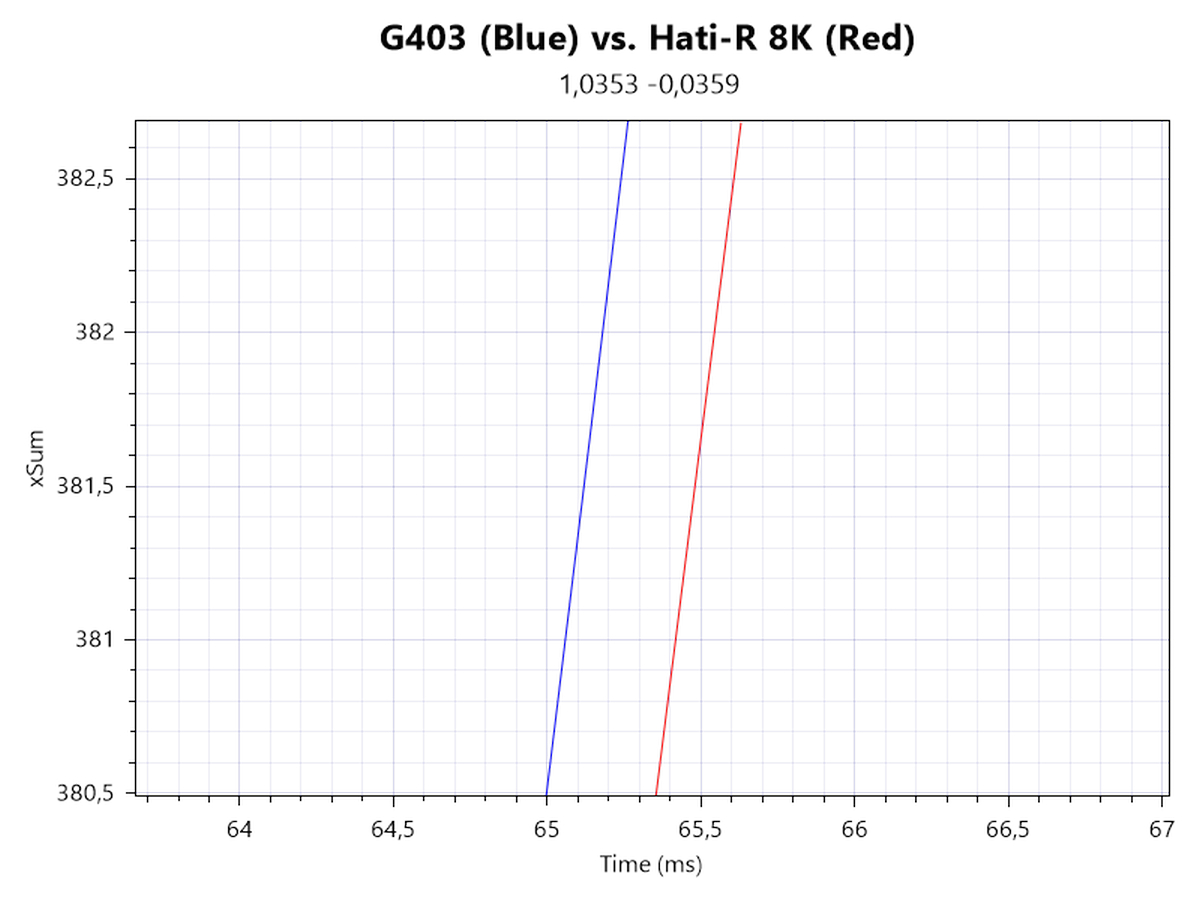
In order to determine motion delay, I'm looking at xSum plots generated at 1600 and 26,000 CPI, both without (first row) and with (second row) MotionSync. The line further to the left denotes the sensor with less motion delay. Without MotionSync, a motion delay differential of 0.5 ms in favor of the Hati-R 8K can be measured at 1600 CPI, whereas at 26,000 CPI, there is no motion delay differential. With MotionSync, a motion delay differential of around 0.5 ms is added.
Wireless testing

Compared to wired, SPI timing jitter is notably increased. Upon enabling MotionSync (second row), SPI timing jitter is reduced yet again.
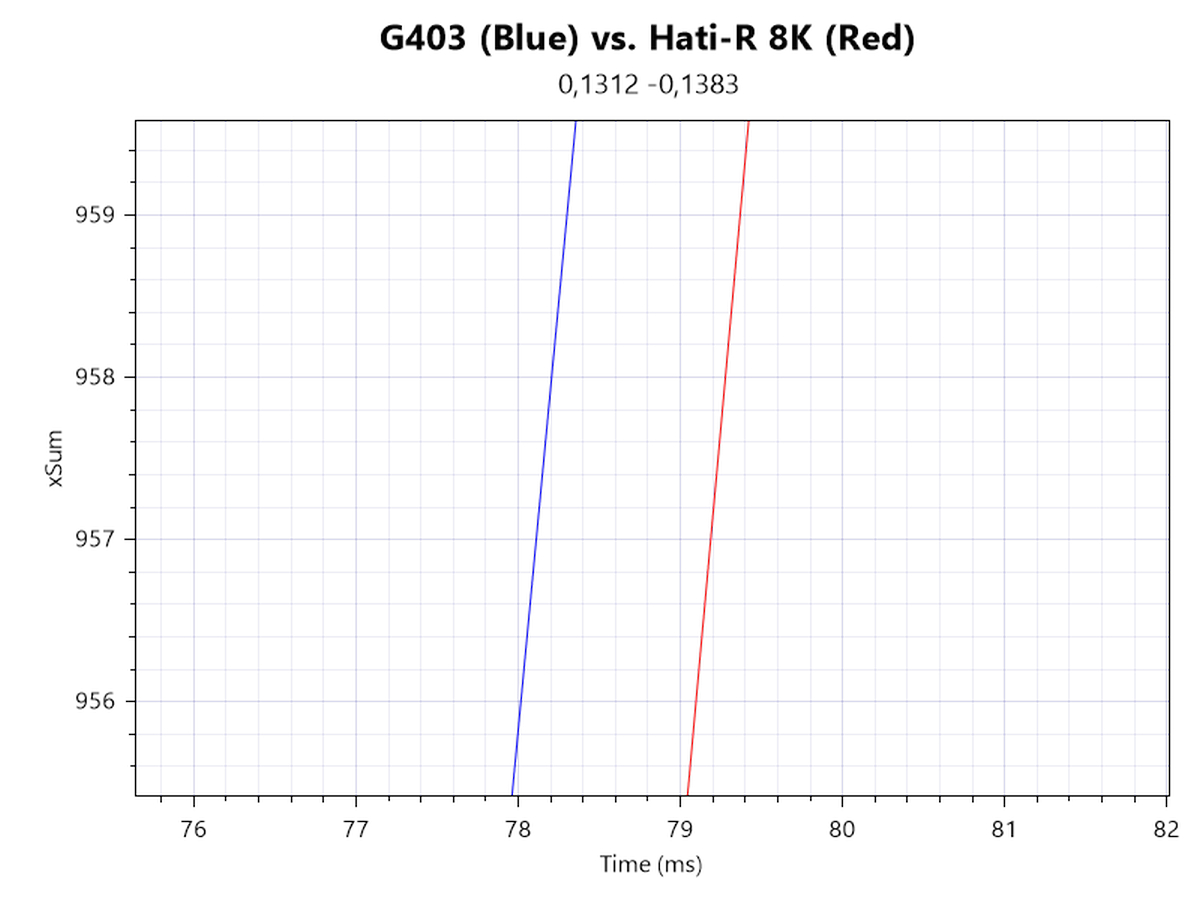
Once again, 1600 and 26,000 CPI are tested, both without (first row) and with (second row) MotionSync. Without MotionSync, there is no motion delay at 1600 CPI, whereas 26,000 CPI shows a motion delay differential of 0.5 ms. With MotionSync, a motion delay differential of around 0.5 ms is added.
Speed-related Accuracy Variance (SRAV)
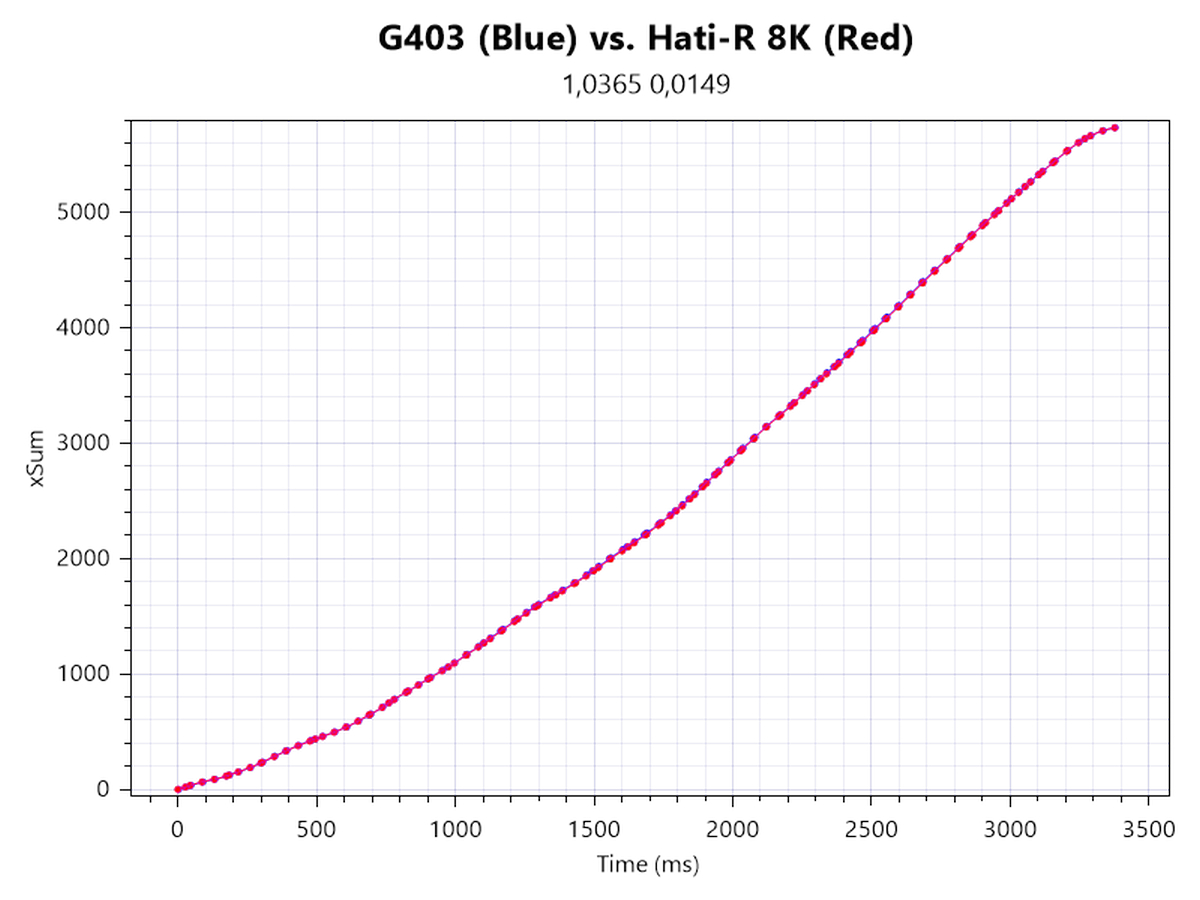
As you can see from the plot, no displacement between the two cursor paths can be observed, which confirms that SRAV is very low.
Perfect Control Speed
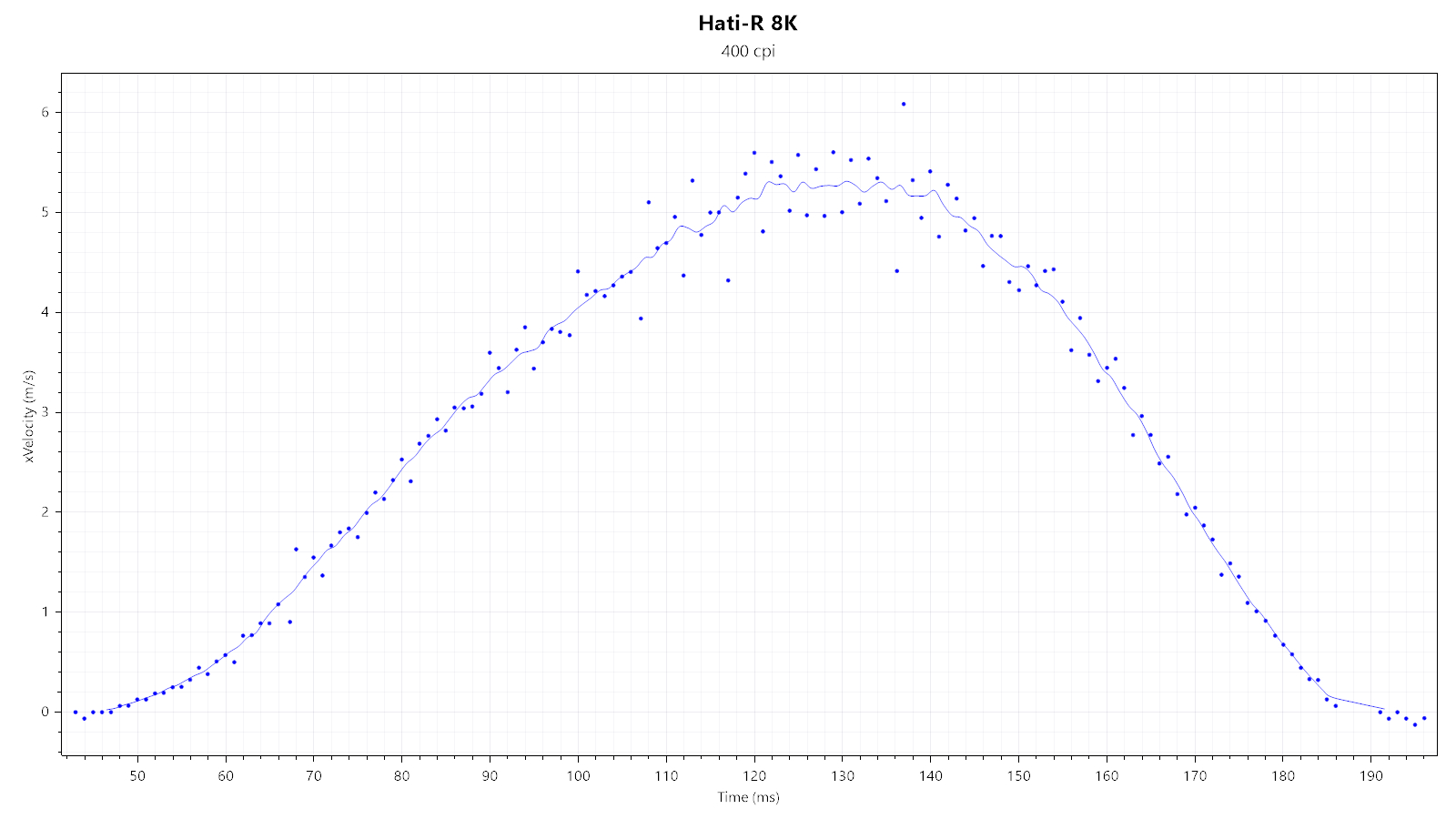
I've only managed to hit a measly 5.5 m/s, which is within the proclaimed PCS range and causes no observable sensor malfunction.
Polling Rate Stability
Wired testing
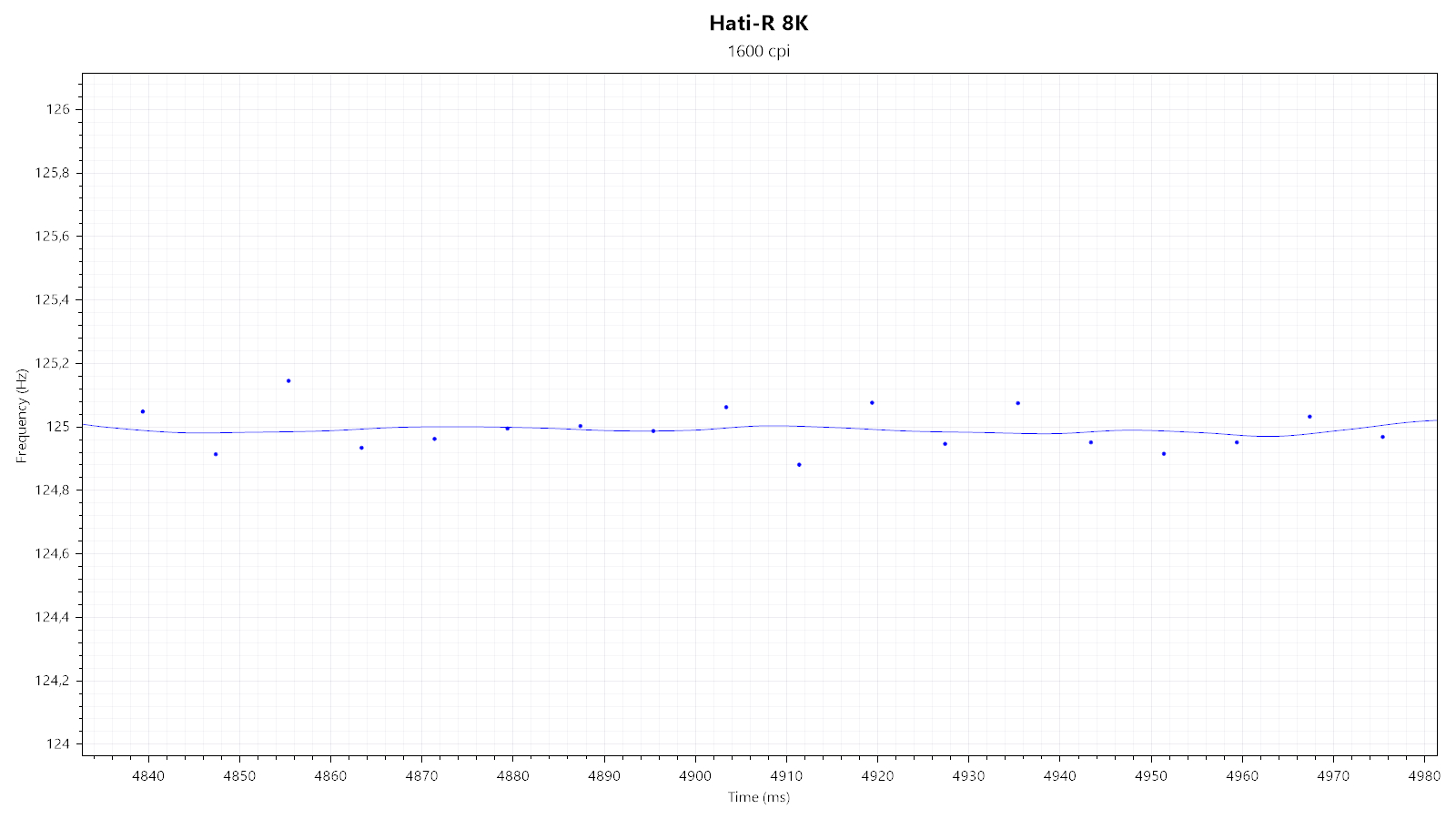
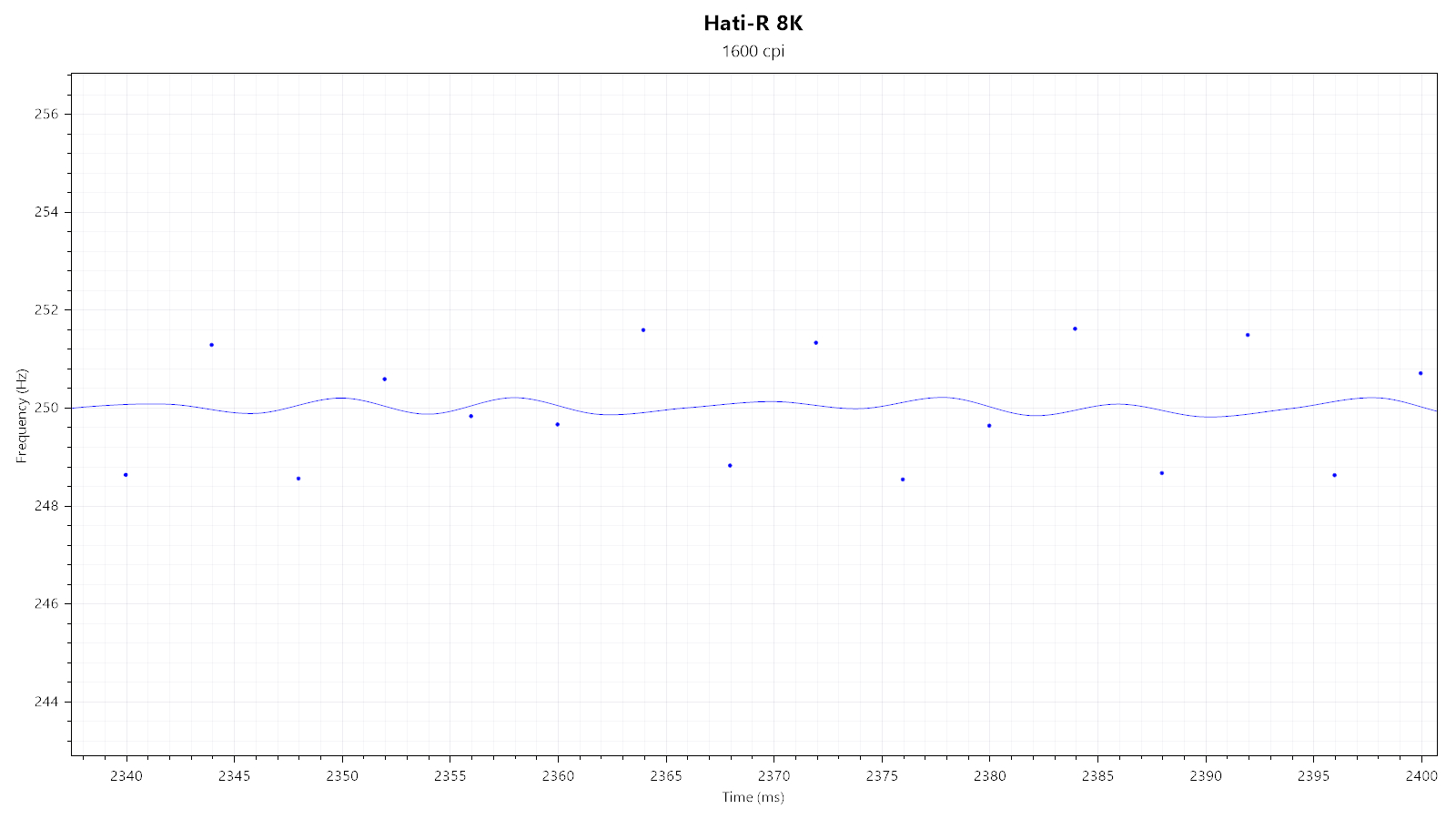

All the available polling rates (125, 250, 500, or 1000 Hz) are fully stable.
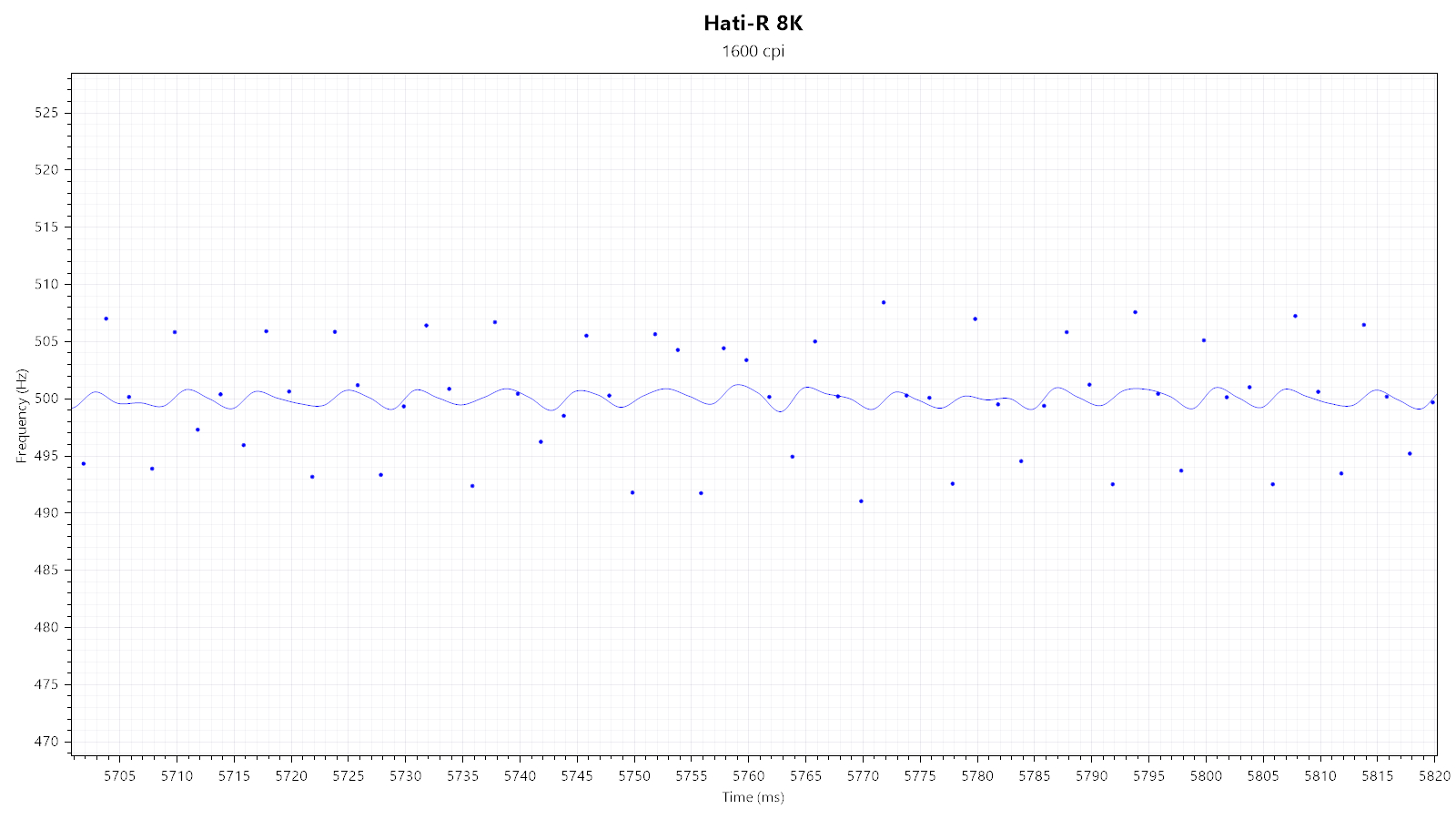
Wireless testing
For wired mice, polling rate stability merely concerns the wired connection between the mouse (SPI communication) and USB. For wireless mice, another device that needs to be kept in sync between the first two is added to the mix: the wireless dongle/wireless receiver. I'm unable to measure all stages of the entire end-to-end signal chain individually, so testing polling-rate stability at the endpoint (the USB) has to suffice here.
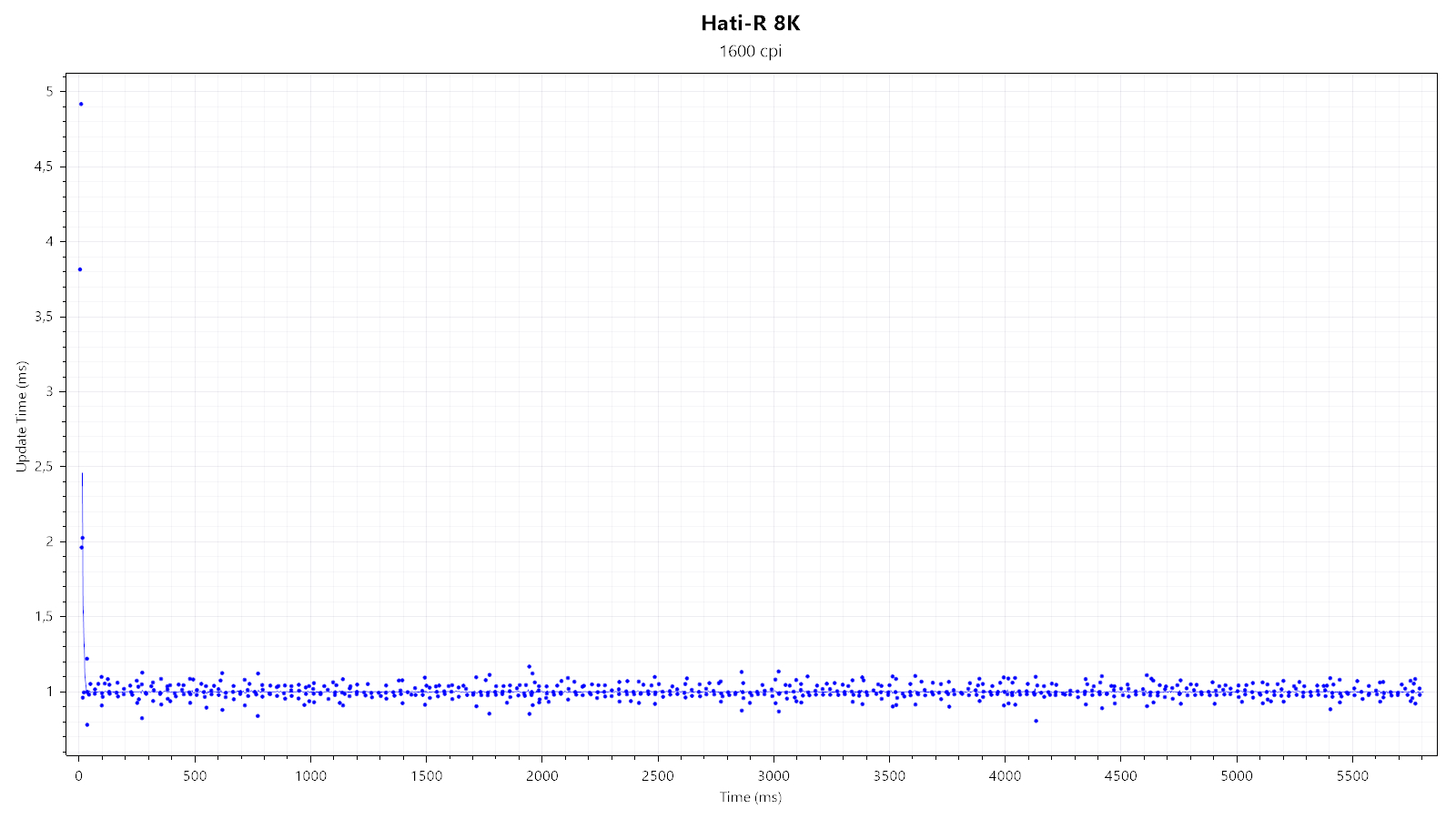
First, I'm testing whether SPI, wireless, and USB communication are synchronized. Any of these being out of sync would be indicated by at least one 2 ms report, which would be the result of any desynchronization drift accumulated over time. I'm unable to detect any periodic off-period polls that would be indicative of a desynchronization drift.
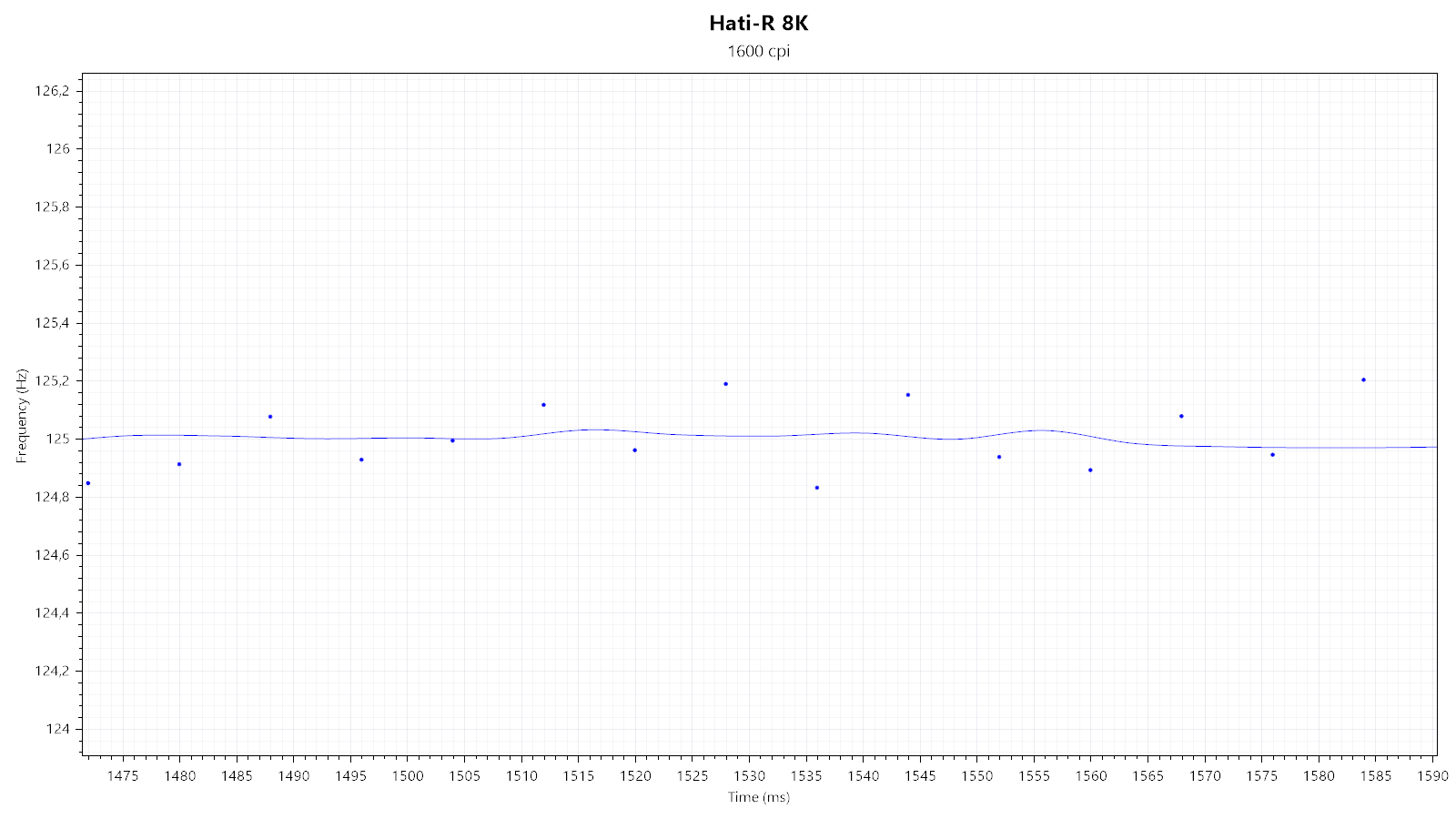
Second, I'm testing the general polling-rate stability of the individual polling rates in wireless mode. Running the Hati-R 8K at a lower polling rate can have the benefit of extending battery life. All polling rates are fully stable.
Paint Test
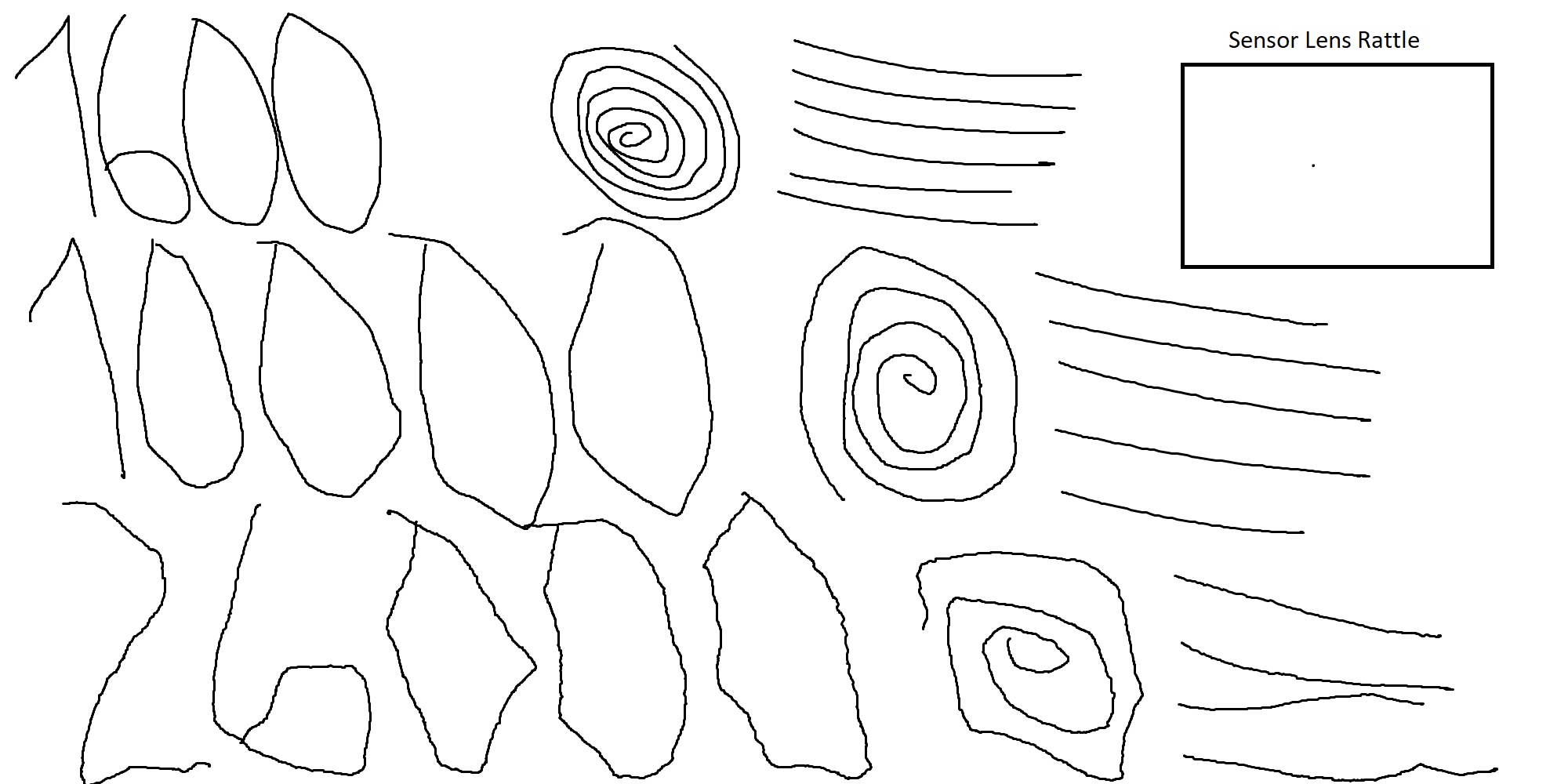
As you can see, no issues with angle snapping can be observed. There is no jitter visible at 1600 CPI. 10,000 CPI shows moderate jitter, which is increased to major levels at 26,000 CPI. This is in line with what to expect from a sensor lacking any smoothing. Lastly, there is no lens movement.
Lift-off Distance
The Hati-R 8K offers two pre-defined LOD levels. On the "Low" setting, the sensor does not track at a height of one DVD. Using the "High" setting, the sensor does track at a height of one DVD, but not at a height of two DVDs (1.2<x<2.4 mm; x=LOD height). Keep in mind that LOD may vary slightly depending on the mousing surface (pad) it is being used on.
Click Latency

In wired mode and using 0 ms debounce time, click latency has been measured to be 0.5 (0.51) ms, with standard deviation being 0.20 ms. In wireless mode and using 0 ms debounce time, click latency has been measured to be 0.3 (0.31) ms, with standard deviation being 0.05 ms. Polling rate has no effect on click latency. After the mouse has been lifted, the next click will have the full latency added upon lift-off (~16 ms) applied.
The main button switches were measured to be running at 1.952 V. I'm not aware of the voltage specifications of the used Huano switches, but find this voltage to be rather low.
Mar 10th, 2025 16:37 EDT
change timezone
Latest GPU Drivers
New Forum Posts
- Maxsun RX580 graphics card crashes (27)
- DLSS as antialiasing? (20)
- Fix for Vram frequency always at maximum (0)
- Please I need help with the poor performance that my PC is giving me (28)
- Company of Heroes 3 (5)
- The TPU Darkroom - Digital SLR and Photography Club (4071)
- A Final Fantasy IX Reminiscence - My love letter and homage to one of the best stories ever told (72)
- Gaming PC instabiliity (20)
- Msi 5090 DOA? (27)
- 3D Printer Club (447)
Popular Reviews
- Sapphire Radeon RX 9070 XT Nitro+ Review - Beating NVIDIA
- XFX Radeon RX 9070 XT Mercury OC Magnetic Air Review
- ASUS Radeon RX 9070 TUF OC Review
- MSI MAG B850 Tomahawk Max Wi-Fi Review
- NVIDIA GeForce RTX 5080 Founders Edition Review
- NVIDIA GeForce RTX 5070 Founders Edition Review
- Corsair Vengeance RGB CUDIMM DDR5-8800 48 GB CL42 Review
- AMD Ryzen 7 9800X3D Review - The Best Gaming Processor
- ASUS GeForce RTX 5070 Ti TUF OC Review
- MSI GeForce RTX 5070 Ti Gaming Trio OC+ Review
Controversial News Posts
- NVIDIA GeForce RTX 50 Cards Spotted with Missing ROPs, NVIDIA Confirms the Issue, Multiple Vendors Affected (513)
- AMD Plans Aggressive Price Competition with Radeon RX 9000 Series (277)
- AMD Radeon RX 9070 and 9070 XT Listed On Amazon - One Buyer Snags a Unit (261)
- AMD RDNA 4 and Radeon RX 9070 Series Unveiled: $549 & $599 (260)
- AMD Mentions Sub-$700 Pricing for Radeon RX 9070 GPU Series, Looks Like NV Minus $50 Again (248)
- NVIDIA Investigates GeForce RTX 50 Series "Blackwell" Black Screen and BSOD Issues (244)
- AMD Radeon RX 9070 and 9070 XT Official Performance Metrics Leaked, +42% 4K Performance Over Radeon RX 7900 GRE (195)
- AMD Radeon RX 9070-series Pricing Leaks Courtesy of MicroCenter (158)