 23
23
Roccat Kone EMP Gaming Mouse Review
Build quality »Sensor
As mentioned earlier the name of the sensor is "Owl-Eye optical sensor", which is a name by Roccat for the PixArt 3361, a custom version of the 3360.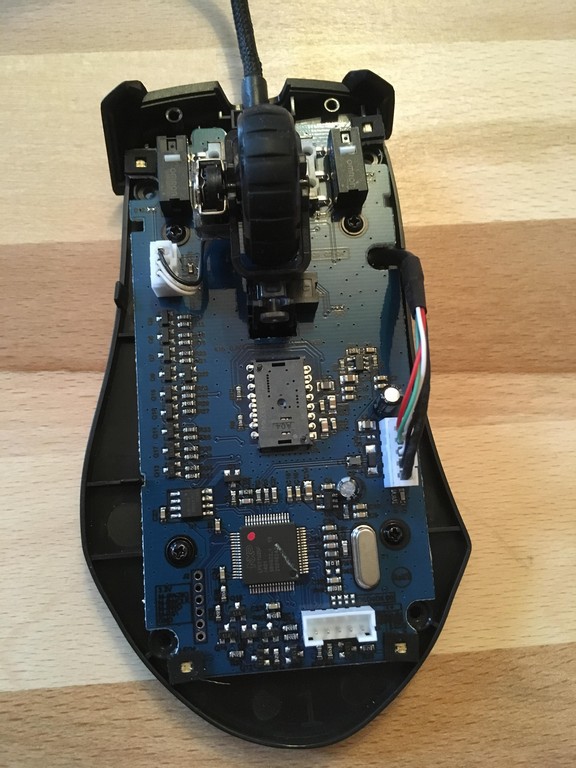
Close up of the sensor

The sensor behaves like you expect a top end sensor to perform: perfectly. The tracking feels very smooth and direct, it adjusts to small movements easily and even very fast flick shots can't make it malfunction.
Performance
To showcase the performance I tested the mouse in MouseTester at various CPI steps and tried to move the mouse as fast as possible across the area of my mousepad. The result is excellent, showing no signs of tracking loss even at 5.5 m/s. Roccat claims the sensor tracks up to 6.35 m/s and on a good surface probably even faster. So it's fair to say that it's fast enough for any human to never worry about hitting malfunction speeds.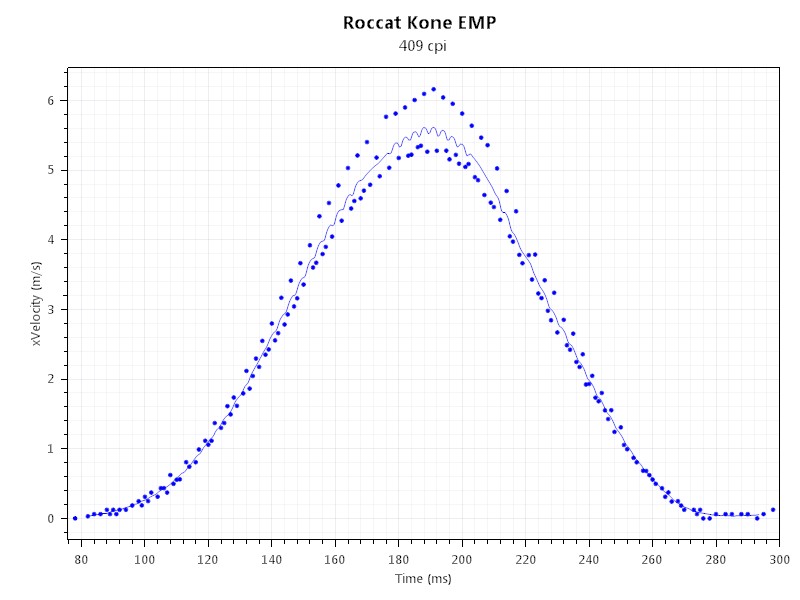
CPI accuracy
The CPI steps are also very close to the proclaimed value set in the software. There usually is a slight variance to CPI with all mice (i.e. you set 400 CPI but it really is something in between 390-410), however the more accurate the better. I test these because in the past certain mice had very high divergence at the higher steps where 6000 CPI would really be 4900 for example. So the CPI accuracy you see below is actually very good and most of all consistent.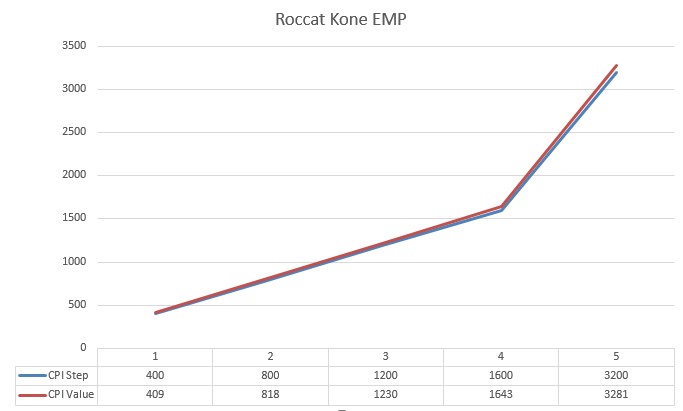
Those are the CPI values out of the box and also the range that is recommended by Roccat. Judging by this and my experience with the 3360 sensors all being very accurate I can confidently say that the higher steps will be similar.
Jitter tests
To see if there are any problems with the cursor path, for example jittering, skipping, severe angle snapping etc. I drew lines in paint with the pencil tool and display at the results. For a bad result you would see zig-zagging instead of smooth lines. The wave in the straight lines is on purpose to test angle snapping of which there seems to be none.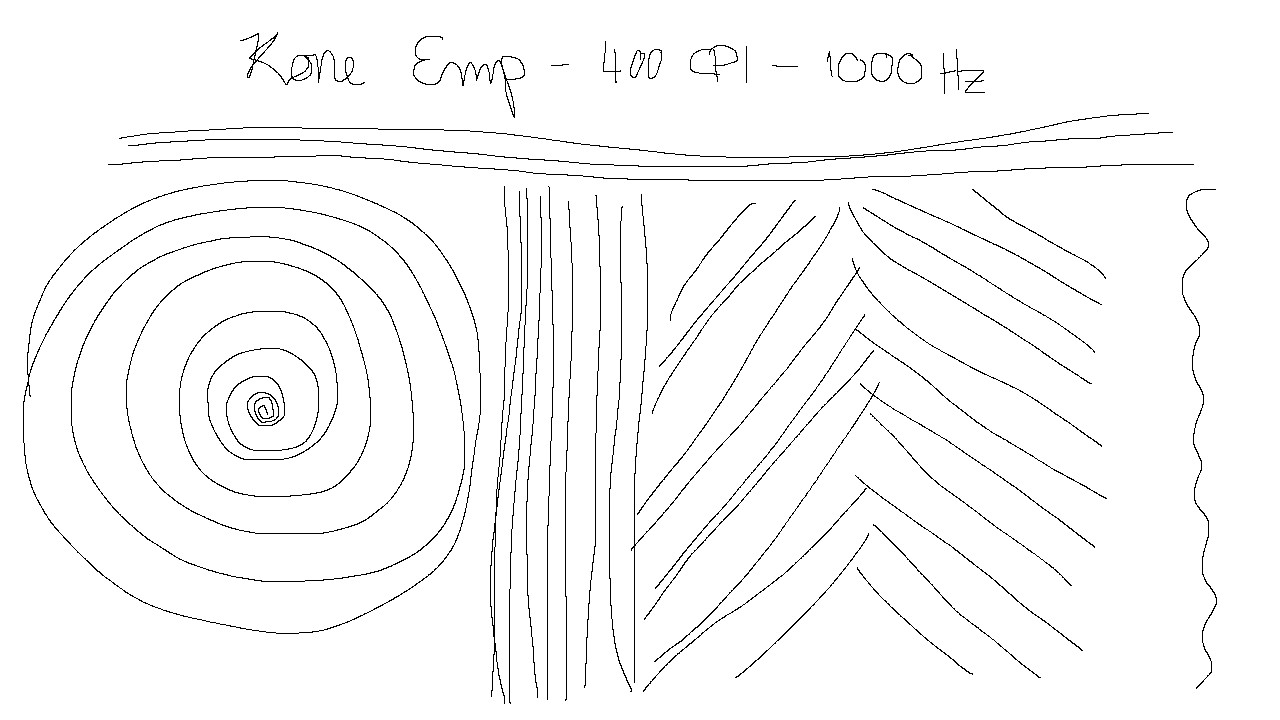
Here is the test for 400 CPI, all looking fine.
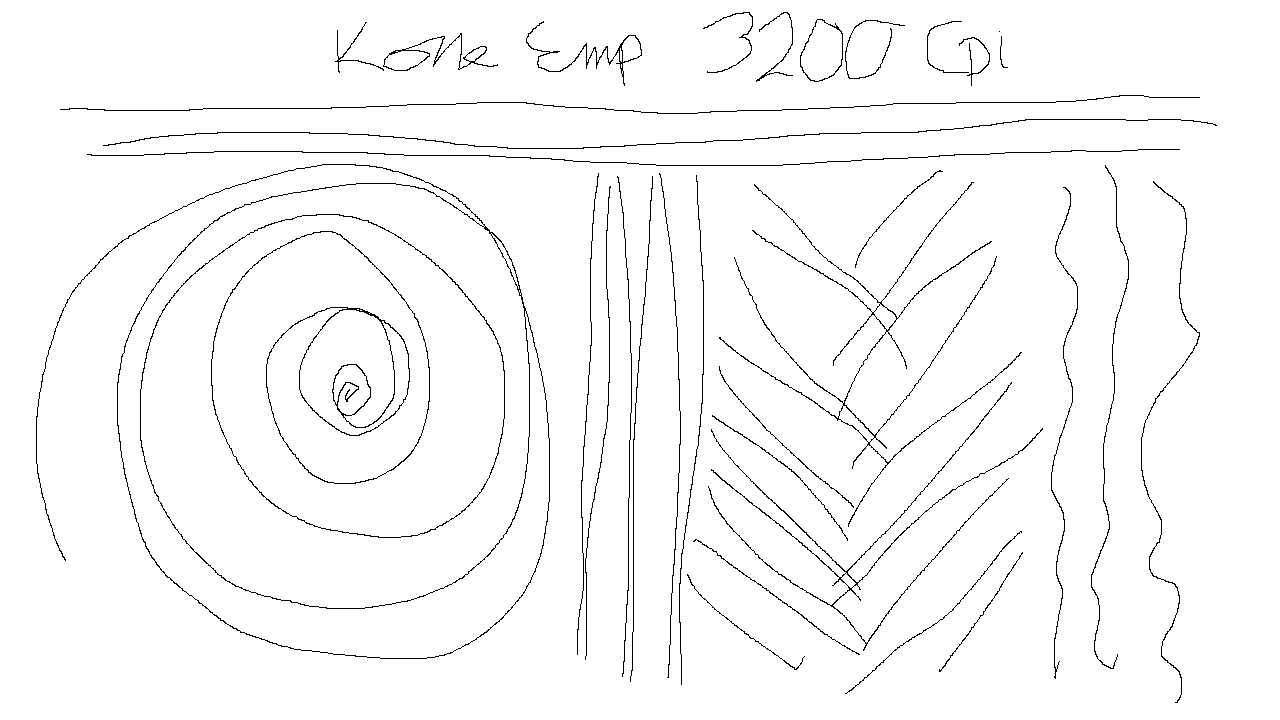
And for 3200 CPI. Despite the fact that the lines look more jittery (look at the diagonal ones and the diagonal sections of the circle) the result is very good for 3200 CPI. You have to realize that for the same size picture in paint as in 400 CPI the actual physical movements I made are much smaller, so the precision of my hand comes into play too.
As a verdict the cursor tracking is near perfect.
Speed related accuracy variance
With this I test how accurate the sensor reports movement at different speeds. You can see me move the mouse at varying speeds from a starting position and back again with a different speed. In the top right corner you see the showpos command in the source engine. The second row shows the viewing angle of which my point of reference mainly is the second one, the x-axis angle. With a script I set my viewing angle to 0 0 0 at the start. After every swipe back to the starting position, I then record the deviation from the starting point. There is obviously a degree of error here that is due to me doing this test manually because I lack a test bench that is able to limit the movement to the x-axis. But as I have done the same test with a variety of different mice and sensors it's possible to compare. In this test the angular displacements were
-0.67, 1.31, 0.22, -1.67, 2.46, 1.38, 2.57
Which is actually a very good result, as was expected with a 3360 sensor type.
Lift off distance
The lift off distance (LOD) can be set in the software to be either low or high. The classic way to repeatably measure LOD was to see at how many stacked CDs a mouse would still track. In general a low LOD is preferred, as the sensor really only tracks accurately if the surface it tracks is in the optimal distance. However some people tend to hover their mice at the end of swipes and feel uncomfortable with a lower setting.The Kone EMP has less than 1 CD LOD with the low setting. With the higher option for the LOD it seems to be just below 2 CDs, at least at 2 CDs I get tiny jittery cursor reactions. So people from both worlds should be happy with this.
The standard setting out of the box is for low LOD.
Jul 13th, 2025 03:02 CDT
change timezone
Latest GPU Drivers
New Forum Posts
- Best motherboards for XP gaming (117)
- 9800x3D - 6400 CL32 1:1 not stable (13)
- Archival HDD constantly starting up for no reason (0)
- 6400c30 vs 8000c36 Ryzen 9800X3D (1)
- 9070XT BIOS flash (what to use?) (6)
- New ToS of Take Two and 2K (12)
- Radeon RX 6700, 6700 XT & 6750 XT users club (1138)
- Is there a WIFI chip I should get? (1)
- What are you playing? (23945)
- 9060 XT 16GB or 6800 XT/6900XT? (30)
Popular Reviews
- Fractal Design Epoch RGB TG Review
- Lexar NM1090 Pro 4 TB Review
- Corsair FRAME 5000D RS Review
- Our Visit to the Hunter Super Computer
- NVIDIA GeForce RTX 5050 8 GB Review
- NZXT N9 X870E Review
- Sapphire Radeon RX 9060 XT Pulse OC 16 GB Review - An Excellent Choice
- AMD Ryzen 7 9800X3D Review - The Best Gaming Processor
- Upcoming Hardware Launches 2025 (Updated May 2025)
- Chieftec Iceberg 360 Review
TPU on YouTube
Controversial News Posts
- Intel's Core Ultra 7 265K and 265KF CPUs Dip Below $250 (288)
- Some Intel Nova Lake CPUs Rumored to Challenge AMD's 3D V-Cache in Desktop Gaming (140)
- AMD Radeon RX 9070 XT Gains 9% Performance at 1440p with Latest Driver, Beats RTX 5070 Ti (131)
- NVIDIA Launches GeForce RTX 5050 for Desktops and Laptops, Starts at $249 (120)
- NVIDIA GeForce RTX 5080 SUPER Could Feature 24 GB Memory, Increased Power Limits (115)
- Microsoft Partners with AMD for Next-gen Xbox Hardware (105)
- Intel "Nova Lake‑S" Series: Seven SKUs, Up to 52 Cores and 150 W TDP (100)
- NVIDIA DLSS Transformer Cuts VRAM Usage by 20% (97)